







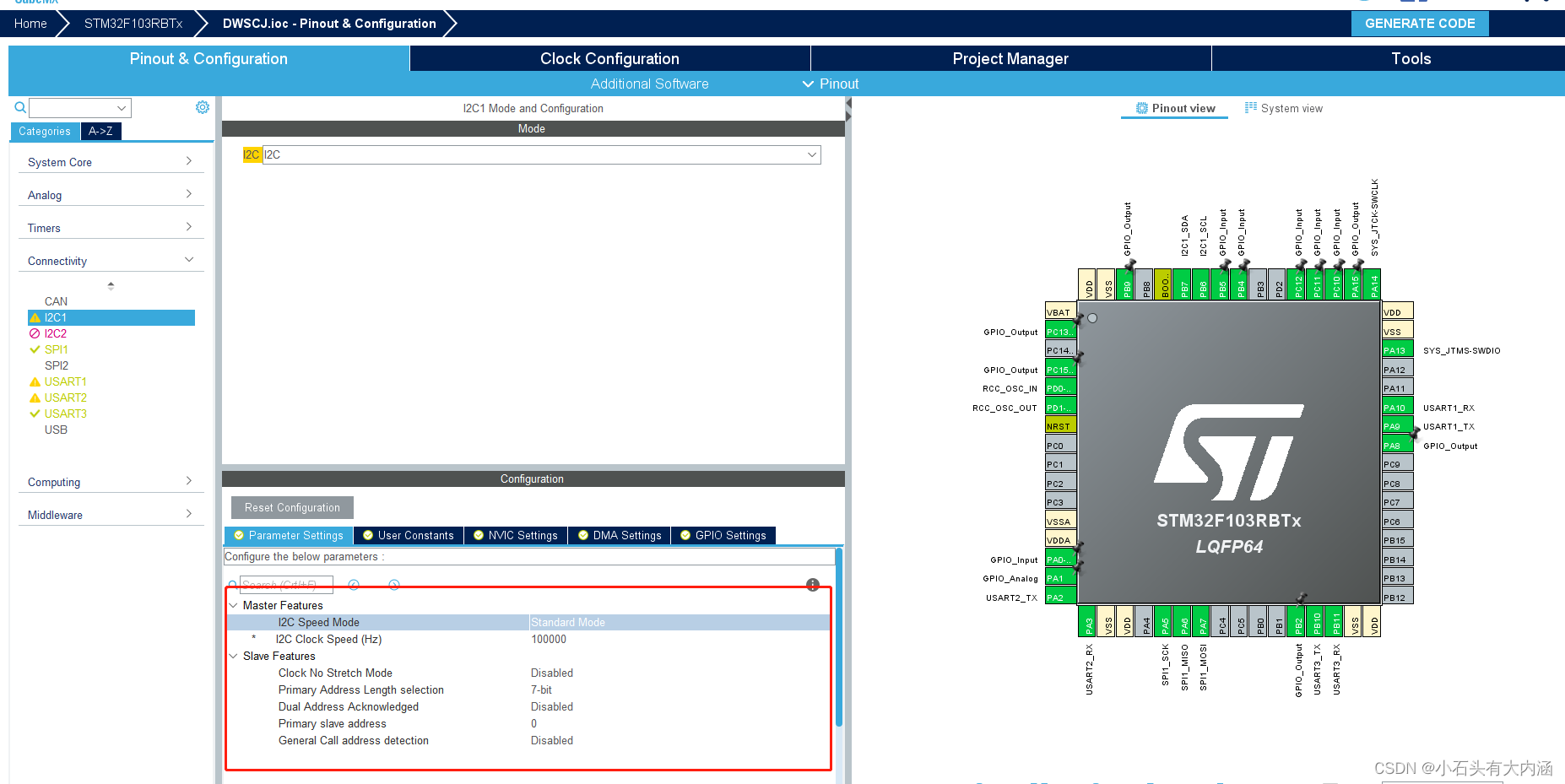
基础配置
- 使用单片机APM32F103RBT6
- 使用外设I2C1 - PB7 SDA
- 使用外设I2C1 - PB6 SCK
- STM32CUBEMX 版本5.6
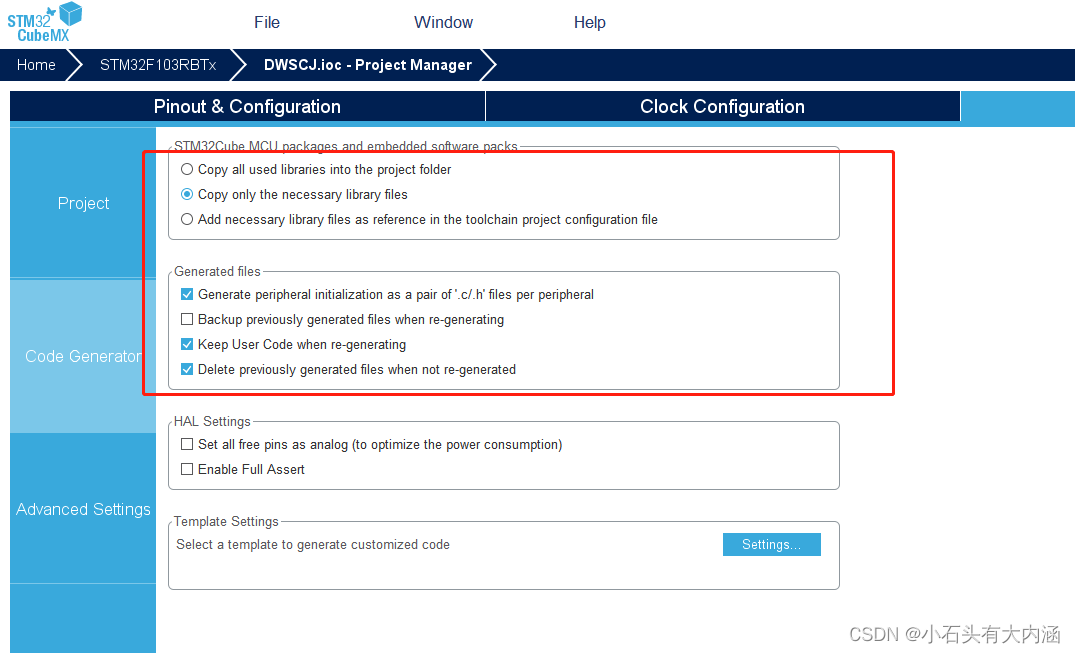
配置如下
i2c.c文件
/**
******************************************************************************
* File Name : I2C.c
* Description : This file provides code for the configuration
* of the I2C instances.
******************************************************************************
* @attention
*
* <h2><center>© Copyright (c) 2022 STMicroelectronics.
* All rights reserved.</center></h2>
*
* This software component is licensed by ST under Ultimate Liberty license
* SLA0044, the "License"; You may not use this file except in compliance with
* the License. You may obtain a copy of the License at:
* www.st.com/SLA0044
*
******************************************************************************
*/
/* Includes ------------------------------------------------------------------*/
#include "i2c.h"
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
I2C_HandleTypeDef hi2c1;
/* I2C1 init function */
void MX_I2C1_Init(void)
{
hi2c1.Instance = I2C1;
hi2c1.Init.ClockSpeed = 100000;
hi2c1.Init.DutyCycle = I2C_DUTYCYCLE_2;
hi2c1.Init.OwnAddress1 = 0;
hi2c1.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT;
hi2c1.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE;
hi2c1.Init.OwnAddress2 = 0;
hi2c1.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE;
hi2c1.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE;
if (HAL_I2C_Init(&hi2c1) != HAL_OK)
{
Error_Handler();
}
}
void HAL_I2C_MspInit(I2C_HandleTypeDef* i2cHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(i2cHandle->Instance==I2C1)
{
/* USER CODE BEGIN I2C1_MspInit 0 */
/* USER CODE END I2C1_MspInit 0 */
__HAL_RCC_GPIOB_CLK_ENABLE();
/**I2C1 GPIO Configuration
PB6 ------> I2C1_SCL
PB7 ------> I2C1_SDA
*/
GPIO_InitStruct.Pin = GPIO_PIN_6|GPIO_PIN_7;
GPIO_InitStruct.Mode = GPIO_MODE_AF_OD;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/* I2C1 clock enable */
__HAL_RCC_I2C1_CLK_ENABLE();
/* USER CODE BEGIN I2C1_MspInit 1 */
/* USER CODE END I2C1_MspInit 1 */
}
}
void HAL_I2C_MspDeInit(I2C_HandleTypeDef* i2cHandle)
{
if(i2cHandle->Instance==I2C1)
{
/* USER CODE BEGIN I2C1_MspDeInit 0 */
/* USER CODE END I2C1_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_I2C1_CLK_DISABLE();
/**I2C1 GPIO Configuration
PB6 ------> I2C1_SCL
PB7 ------> I2C1_SDA
*/
HAL_GPIO_DeInit(GPIOB, GPIO_PIN_6|GPIO_PIN_7);
/* USER CODE BEGIN I2C1_MspDeInit 1 */
/* USER CODE END I2C1_MspDeInit 1 */
}
}
/* USER CODE BEGIN 1 */
/*******************************************************************************
* 函数名: WriteI2CTData
* 描述 : 写入I2C数据
* 参数 : addr设备地址,reg 寄存器地址 *buf写入的数据,len写入的长度
* 返回值:
*******************************************************************************/
HAL_StatusTypeDef WriteI2cData(uint8_t addr, uint8_t reg, uint8_t *pBuffer, uint8_t len)
{
HAL_StatusTypeDef status = HAL_OK;
status = HAL_I2C_Mem_Write(&hi2c1, addr, (uint16_t)reg, I2C_MEMADD_SIZE_8BIT, pBuffer, len, 1000);
return status;
}
/*******************************************************************************
* 函数名: ReadI2cData
* 描述 : 读RX8025T寄存器
* 参数 : addr寄存器地址,*buf存储位置,len读取的长度
* 返回值: 1=操作失败,0=操作成功
*******************************************************************************/
uint8_t ReadI2cData(uint8_t addr, uint8_t reg, uint8_t *buf,uint8_t len)
{
HAL_StatusTypeDef status = HAL_OK;
status = HAL_I2C_Mem_Read(&hi2c1, addr, (uint16_t)reg, I2C_MEMADD_SIZE_8BIT, buf, len, 1000);
return status;
}
/*******************************************************************************
* 函数名: I2cIsDeviceReady
* 描述 : 检测I2C设备是否处于准备好可以通信状态
* 参数 : DevAddress 设备地址,Trials 尝试测试次数
* 返回值:
*******************************************************************************/
HAL_StatusTypeDef I2cIsDeviceReady(uint16_t DevAddress, uint32_t Trials)
{
return (HAL_I2C_IsDeviceReady(&hi2c1, DevAddress, Trials, 1000));
}
/* USER CODE END 1 */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
i2c.h文件
/**
******************************************************************************
* File Name : I2C.h
* Description : This file provides code for the configuration
* of the I2C instances.
******************************************************************************
* @attention
*
* <h2><center>© Copyright (c) 2022 STMicroelectronics.
* All rights reserved.</center></h2>
*
* This software component is licensed by ST under Ultimate Liberty license
* SLA0044, the "License"; You may not use this file except in compliance with
* the License. You may obtain a copy of the License at:
* www.st.com/SLA0044
*
******************************************************************************
*/
/* Define to prevent recursive inclusion -------------------------------------*/
#ifndef __i2c_H
#define __i2c_H
#ifdef __cplusplus
extern "C" {
#endif
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
extern I2C_HandleTypeDef hi2c1;
/* USER CODE BEGIN Private defines */
/* USER CODE END Private defines */
void MX_I2C1_Init(void);
/* USER CODE BEGIN Prototypes */
HAL_StatusTypeDef WriteI2cData(uint8_t addr, uint8_t reg, uint8_t *pBuffer, uint8_t len);
uint8_t ReadI2cData(uint8_t addr, uint8_t reg, uint8_t *buf,uint8_t len);
HAL_StatusTypeDef I2cIsDeviceReady(uint16_t DevAddress, uint32_t Trials);
/* USER CODE END Prototypes */
#ifdef __cplusplus
}
#endif
#endif /*__ i2c_H */
/**
* @}
*/
/**
* @}
*/
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
bsp_rtc.c文件(名字可以自己随意定义)
#include "bsp.h"
#include "app_task.h"
#define RX8025T_DEVICE_ADDRESS 0x64
/***********************************************************************************
RX8025T实时时钟驱动程序(硬件IIC)
BL8025T 的从地址为 7bit 固定的数据(0110 010)在通信时,从地址是附加上 R/W 以 8bit 数据发送的。
0110 0100为写模式,0110 0101为读模式,对应十进制为:100、101;对应16进制为:0x64、0x65。
BL8025T 有地址自动增加功能。指定的从地址一旦开始,之后只有数据字节被发送。每个字节后,BL8025T 的地址自动增加。
***********************************************************************************/
/*
*********************************************************************************************************
* 函 数 名: bsp_InitRtc
* 功能说明: 初始RTC. 该函数被 bsp_Init() 调用。
* 形 参: 无
* 返 回 值: 无
*********************************************************************************************************
*/
void bsp_InitRtc(void)
{
uint8_t status;
//固定周期时钟源为分钟更新
uint8_t val[3]={0x03,0x00,0x40}; //0x0D、0x0E、0x0F、三个寄存器的值,设置时间更新为“秒”更新,关闭所有闹钟,温补时间为2秒,打开时间更新中断,关闭其他中断。
status = WriteI2cData(RX8025T_DEVICE_ADDRESS, RX8025T_EXT_REG,val,3);
printf("RX8025T set OK! %d\r\n", status);
}
/*******************************************************************************
* 函数名: bsp_SetRTCAlarm
* 描述 : 设置RX8025T的闹钟
* 参数 : 存储时间的结构体
* 返回值: 0成功,其它失败。
*******************************************************************************/
uint8_t bsp_SetRTCAlarm(uint16_t alarm)
{
uint8_t status;
uint8_t value = 0;
uint8_t reg_cy1[2];//报警固定周期寄存器
uint8_t reg[3];
// uint8_t buf[5];
/*
固定周期定时器配置
先将TIE置“0”,以避免在配置固定周期中断的同时发生意外的硬件中断。
(1) 设定TSEL1,0两位选择倒计时周期。
(2) 设定B,C寄存器,从而设置减法计数器的初值,然后初始化TF标志为“0”。
(3) 设置TIE,TE位为“1”
*/
value = 0x40;
status = WriteI2cData(RX8025T_DEVICE_ADDRESS, RX8025T_CONT_REG, &value, 1);
value = 0x00;
status = WriteI2cData(RX8025T_DEVICE_ADDRESS, RX8025T_EXT_REG, &value, 1);
reg_cy1[0] = alarm & 0xFF;
reg_cy1[1] = (alarm >> 8) & 0xFF;
status = WriteI2cData(RX8025T_DEVICE_ADDRESS, RX8025T_CYl_REG, reg_cy1, 2);
reg[0] = 0x13; //分钟更新
reg[1] = 0x10;
reg[2] = 0x50;
status = WriteI2cData(RX8025T_DEVICE_ADDRESS, RX8025T_EXT_REG, reg, 3);
return status;
}
/*******************************************************************************
* 函数名: bsp_GetRtcTime
* 描述 : 从RX8025T获取时间
* 参数 : 存储时间的结构体
* 返回值: 0成功,1失败。
*******************************************************************************/
uint8_t bsp_GetRtcTime(TIME_T *t)
{
uint8_t rtc_str[7];
if(ReadI2cData(RX8025T_DEVICE_ADDRESS, RX8025T_SEC_REG, rtc_str,7) != 0) //获取日期与时间
return 1; //读取出错
t->second = ((rtc_str[0]>>4)*10) + (rtc_str[0] & 0x0f);
t->minute = ((rtc_str[1]>>4)*10) + (rtc_str[1] & 0x0f);
t->hour = ((rtc_str[2]>>4)*10) + (rtc_str[2] & 0x0f);
t->week = rtc_str[3];
t->day = ((rtc_str[4]>>4)*10) + (rtc_str[4] & 0x0f);
t->month = ((rtc_str[5]>>4)*10) + (rtc_str[5] & 0x0f);
t->year = ((rtc_str[6]>>4)*10) + (rtc_str[6] & 0x0f);
return 0;
}
/*******************************************************************************
* 函数名: bsp_SetRtcTime
* 描述 : 设置RX8025T时间
* 参数 : 存储时间的结构体
* 返回值: 0成功,1失败。
*******************************************************************************/
uint8_t bsp_SetRtcTime(TIME_T *t)
{
uint8_t status;
uint8_t rtc_str[7];
rtc_str[0] = ((t->second/10)<<4) | (t->second%10);
rtc_str[1] = ((t->minute/10)<<4) | (t->minute%10);
rtc_str[2] = ((t->hour/10)<<4) | (t->hour%10);
rtc_str[3] = t->week;
rtc_str[4] = ((t->day/10)<<4) | (t->day%10);
rtc_str[5] = ((t->month/10)<<4) | (t->month%10);
rtc_str[6] = ((t->year/10)<<4) | (t->year%10);
status = WriteI2cData(RX8025T_DEVICE_ADDRESS, RX8025T_SEC_REG, rtc_str, 7);
return status;
}
bsp_rtc.h文件(名字可以自己随意定义)
#ifndef _BSP_RTC_H_
#define _BSP_RTC_H_
#define RX8025T_SEC_REG 0x00 //秒
#define RX8025T_MIN_REG 0x01 //分
#define RX8025T_HOU_REG 0x02 //时
#define RX8025T_WEE_REG 0x03 //星期,bit0~bit7对应日、一、二、三、四、五、六,对应值为0x01,0x02,0x04,0x08,0x10,0x20,0x40,不可出现2位为1的情况。
#define RX8025T_DAY_REG 0x04 //日期
#define RX8025T_MON_REG 0x05 //月份
#define RX8025T_YEA_REG 0x06 //年
#define RX8025T_RAM_REG 0x07 //RAM
#define RX8025T_ALm_REG 0x08 //闹钟分,不用是可做为ram使用。
#define RX8025T_ALh_REG 0x09 //闹钟时,不用是可做为ram使用。
#define RX8025T_ALw_REG 0x0a //闹钟星期,不用是可做为ram使用。
#define RX8025T_CYl_REG 0x0b //周期定时器的低8位
#define RX8025T_CYm_REG 0x0c //周期定时器的高4位,周期定时器共计12位。
#define RX8025T_EXT_REG 0x0d //扩展寄存器,bit7-TEST=工厂测试,总应该写0;bit6-WADA=星期或日历报警选择位;bit5-USEL=选择秒或分钟更新触发更新中断,0=秒更新,1=分钟更新;
//bit4-TE=周期定时使能;bit3\2-FSEL1\0=芯片FOUT引脚输出频率选择位;bit1\0-TSEL1\0=用来设定固定周期的内部时钟源。
#define RX8025T_FLAG_REG 0x0e //标志寄存器,bit5-UF,bit4-TF,bit3-AF,分别是时间更新中断,固定周期定时中断,闹钟中断的中断标志位;bit1-VLF电压低,bit0-VDET由于电压低温补停止工作标志位。
#define RX8025T_CONT_REG 0x0f //控制寄存器,bit6~7(CSEL0、1)=温补间隔设置;bit5(UIE)=时间更新中断使能位(可由D寄存器的USEL位配置为1秒更新或1分钟更新);
#define TESL1_0_CLOCK_4069 0
#define TESL1_0_CLOCK_64 1
#define TESL1_0_CLOCK_S 2
#define TESL1_0_CLOCK_M 3
//TE 位 此位是用来控制固定周期定时功能使能。
//置“1”是选择开启固定周期定时功能。
//置“0”是选择关闭固定周期定时功能。
#define TE_1 1<<4
#define TE_0 (~(1<<4))
#define TF_1 1<<4
#define TF_0 (~(1<<4))
#define TF_FLAG 0x10
//定时中断使能位
#define TIE_1 1<<4
#define TIE_0 (~(1<<4))
typedef struct // _TIME
{
uint8_t second;
uint8_t minute;
uint8_t hour;
uint8_t week;
uint8_t day;
uint8_t month;
uint8_t year;
uint8_t reserve;
}TIME_T;
void bsp_InitRtc(void);
uint8_t bsp_SetRTCAlarm(uint16_t alarm);
uint8_t bsp_SetRtcTime(TIME_T *t);
uint8_t bsp_GetRtcTime(TIME_T *t);
#endif















 364
364











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









