







问题描述
给定一个带权重的有向图G=(V,E),V为顶点集,E为有向边集,每一条有向边均有一个权重。对于给定的顶点s、t,以及V的子集V’,寻找从s到t的不成环有向路径P,使得P经过V’中所有的顶点(对经过V’中节点的顺序不做要求)。
整数规划求解思路
记边的变量为
ei
对应权重为
ci
, 点记为
vi
, 其出边记为
voji
, 其入边记为
viji
, 必经点记为
dji
可以建立如下规划方程
必经点出边和为1
所有点出边和等于入边和
普通点 出边和小于等于1
起点 出边和为1, 入边和为0
终点 入边和为1, 出边和为0
这样使用支持 整数规划 或 混合整数规划的求解器的求解器即可以求解。这样,就将路径问题转化为了线性规划问题。
防止环路
如下的拓扑中,边上的红色数字表示边的id, 绿色为对应的权重。
起点为0, 终点为1, 必经点为2,3。
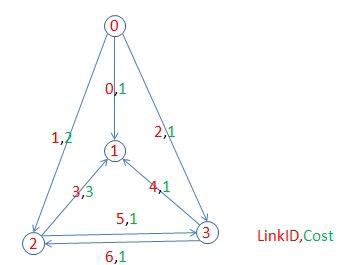
可行路径为
0 -> 2 -> 3 -> 1, 权重为4
0 -> 3 -> 2 -> 1, 权重为5
但如果使用上面的模型求解,就会求出如下的结果
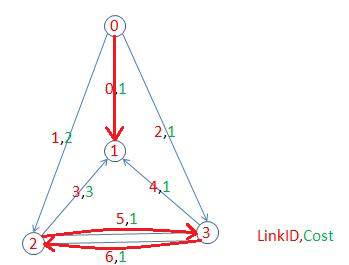
这样也符合以上的模型,但很明显,并不是起点到终点的有效路径。
必经点之间出现了环路。但在使用模型求解之前,是无法知道哪些边会组成环路的。
所以,最简单的思路就是,求解一次,检测是否出现了环路。如果有环路,就对组成环路的边加上限制。然后重新计算。但这样的效率明显不高。
这里介绍另一种防止环路的方法。
对所有边的起点和终点,添加如下约束方程:
其中 eis eit 分别表示边 ei 的起点和终点。
如果部分边组成了环路,则环路部分的不等式相加,左侧的起点和终点恰好全部约去,就会出现 n≤n−1 的矛盾情况。
通过添加这样的方程,即可以防止环路。
求解
用于求解线性规划问题的求解器有很多。我们使用的是lp_solve。之前没有接触过这个领域,使用之后,发现很方便。
建立模型,将模型表示为求解器的输入格式,直接输出结果。
写在后面的一些话
使用线性规划问题,求解路径问题,不同于搜索的方法。自己接触之后,感觉思路很新颖,很神奇,仿佛打开了另一个世界。
而建立模型,使用求解器求解。自己感觉是不是所谓的函数式编程。
求解器求解之前,对应的结果其实已经被模型确定了。求解过程只是找出这个解而已。
如果模型没有准确的描述问题,那得到的结果必然不正确。
函数式编程,还是得学习一个。















 1547
1547

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









