







一、系统概述
自动浇水灌溉系统设计方案,以AT89C51单片机为控制核心,采用模块化的设计方法。
组成部分为:5V供电模块、土壤湿度传感器模块、ADC0832模数转换模块、水泵控制模块、按键输入模块、LCD显示模块和声光报警模块,结构如下。
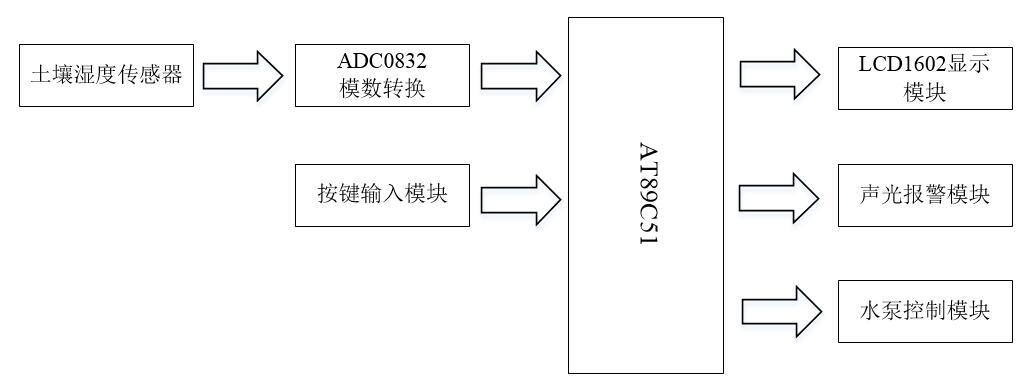
工作原理为:土壤湿度传感器测出土壤湿度模拟信号,经AD转换器将模拟信号转换成数字信号后传输到51单片机,单片机将土壤湿度数据与设定的上下限值进行比较。
当土壤湿度低于下限时,驱动水泵工作进行灌溉浇水,并提供声光报警。设计获取,蒋宇智QQ(2327603104)。
当土壤湿度增加至超过下限时,声光报警关闭,但水泵会继续工作,直到土壤湿度继续增加并超过设定的上限值为止。
用户可通过按键设定湿度上下限值,土壤湿度数据和上下限值数据均通过LCD显示屏实时显示。
二、土壤湿度传感器

Proteus仿真电路

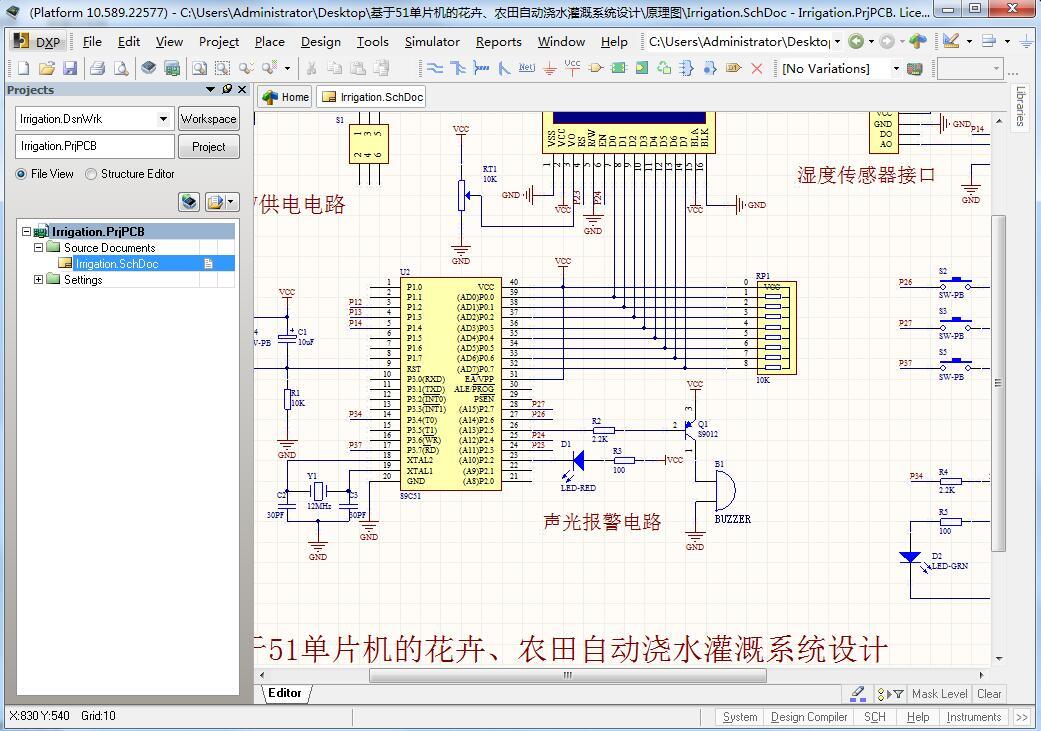
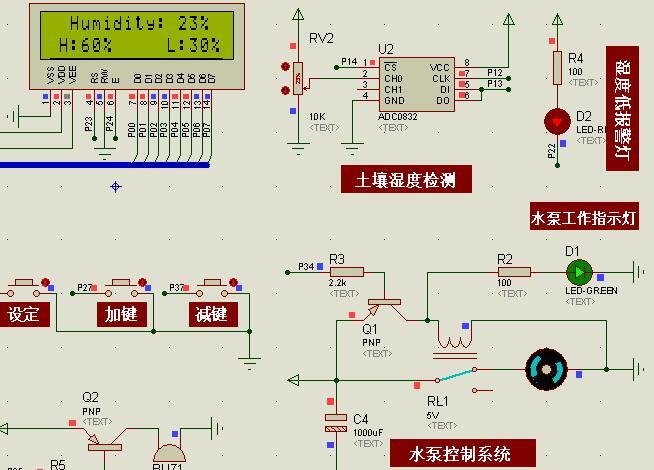
三、原理图
仿真结果分析
打开Proteus仿真文件,其后缀名为.DSN。双击单片机,加载AutoWater.hex文件(位于Keil C程序文件夹内),运行仿真,结果如下。

由图可知,LCD显示当前测量的土壤湿度(Humidity)为53%,系统预设的湿度上限(H:High的缩写)为60%,下限(L:Low的缩写)为30%,土壤湿度正常,在上下限范围之内。资源获取,蒋宇智QQ(2327603104)。
此时,湿度低报警灯和蜂鸣器处于关闭状态,继电器RL1开关打至下方,水泵处于断电状态。
通过调节滑动变阻器RV2(鼠标点击上下两个红色箭头),改变输入到ADC0832采样通道0的电压大小来模拟土壤湿度的变化。
点击RV2向下的红色箭头,模拟土壤湿度的降低。例如,当土壤湿度从53%降低至23%,低于下限值30%时,红色LED报警灯点亮,蜂鸣器发声,继电器RL1开关打至上方,水泵通电,开始自动浇水,绿色的水泵工作指示灯也被点亮。
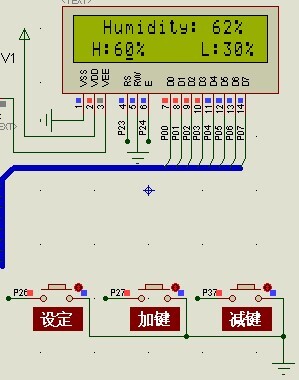
点击RV2向上的红色箭头,模拟土壤湿度的增加。
当土壤湿度从23%增加至37%,超过下限时,声光报警停止工作,但水泵会继续工作,直到土壤湿度继续增加到高于上限值为止,过程如下所示。


需要说明的是,水泵停止工作(即:土壤湿度超过上限)后,调节RV2模拟土壤湿度的下降,在下降到上下限范围内时,水泵不会启动,只有土壤湿度继续下降至低于下限时才会启动。
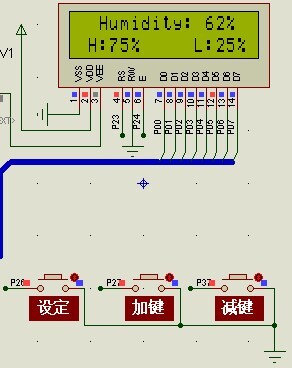
通过按键可以预设湿度的上下限值。
点击“设定”键,进入上下限设置模式,首先是H上限值光标闪烁,此时可以点击加/减键,改变上限值大小。
上限值设置完成后,点击“设定”键,L下限值光标闪烁,同理,点击加/减键,改变下限值大小。

上下限值都设置完成后,再次点击“设定”键,退出上下限设置模式。例如,我们设置湿度上限值H为75%,下限值L为25%,结果如下图所示。
综上所述,仿真运行效果满足设计要求。
四、C代码
void main()//主函数
{
Init1602();//初始化液晶函数
init(); //初始化定时器
init_eeprom(); //开始初始化保存的数据
while(1)//进入循环
{
for(m=0;m<50;m++)//读50次AD值
sum = adc0832(0)+sum; //读到的AD值,将读到的数据累加到sum
temp=sum/50;//跳出上面的for循环后,将累加的总数除以50得到平均值temp
sum=0; //平均值计算完成后,将总数清零
temp = temp*0.390625; //ADC0832存储数据为1个字节,湿度显示范围为0~100,因此1单位湿度=100/256=0.390625
// if(temp<=full_range)
// temp=(temp*100)/full_range;
// else
// temp=100;
if(set==0)//set为0,说明现在不是设置状态
Display_1602(temp,MH,ML);//显示AD数值和报警值
if(temp<ML&&set==0)//湿度值小于报警值
{//资源获取,蒋宇智QQ(2327603104)
flag=1;//打开报警
Relay=0;//继电器触点闭合,水泵工作
LED_R=0; //红灯点亮
}
else if(temp>MH&&set==0) //湿度值大于报警值
{
flag=0;//关闭报警
Relay=1;//继电器触点打开,水泵停止
LED_R=1; //红灯熄灭
}
else
{
flag=0;
LED_R=1; //红灯熄灭
}
Key(); //调用按键函数
}
} #include <reg51.H>
#include "intrins.h"
#define uint unsigned int
#define uchar unsigned char
#define ulong unsigned long
#define LCDIO P0 //液晶屏数据口
//ADC0832的引脚
sbit ADCLK =P1^1; //ADC0832 clock signal
sbit ADDIO =P1^3; //ADC0832 k in
sbit ADCS =P1^4; //ADC0832 chip seclect
sbit rs=P1^0; //定义1602 RS
sbit lcden=P1^2; //定义1602 EN
sbit key1=P3^0; //设定
sbit key2=P3^1; //加
sbit key3=P3^2; //减
sbit motor=P3^7; //继电器接口
sbit speak=P1^5; //蜂鸣器接口
uchar key; //设定指针
uint RH=400,RL=200;//水位上下限
float temp_f;
ulong temp;
uchar v;
uchar count,s1num;
uchar code table[]= " moisture: ";
uchar code table1[]="RH: % ";
uchar getdata; //获取ADC转换回来的值
/*********************************************/
void delay(uint z) //延时
{
uint x,y;
for(x=z;x>0;x--)
for(y=110;y>0;y--);
}
/**********************************************/
void write_com(uchar com)
{
rs=0;
// rd=0;
lcden=0;
P0=com;
delay(5);
lcden=1;
delay(5);
lcden=0;
}
/*********************************************/
void write_date(uchar date)
{
rs=1;
// rd=0;
lcden=0;
P0=date;
delay(5);
lcden=1;
delay(5);
lcden=0;
}
void lcdinit()
{
lcden=0;
write_com(0x38);
write_com(0x0c);
write_com(0x06);
write_com(0x01);
}
/***********************************************/
void init()
{
uchar num;
for(num=0;num<15;num++)
{
write_date(table[num]);
delay(5);
}
write_com(0x80+0x40);
for(num=0;num<15;num++)
{
write_date(table1[num]);
delay(5);
}
}
//****************************************************************************/
/************
读ADC0832函数
************/
//采集并返回
/****************************************************************************
函数功能:AD转换子程序
入口参数:CH(如果读取CH0,channel的值为0x01,如果读取CH1则channel的值为0x03)
出口参数:adval
****************************************************************************/
uchar Adc0832() //AD转换,返回结果
{
uchar i;
uchar dat=0;
ADCLK=0;
ADDIO=1;
ADCS=0; //拉低CS端
ADCLK=1;
ADCLK=0; //拉低CLK端,形成下降沿1
ADDIO=1;//指定转换通道是CH1还是CH2,指定值位与0x1,取最后一位的值
ADCLK=1;
ADCLK=0; //拉低CLK端,形成下降沿2
ADDIO=0;//指定值右移一位,再取最后一位的值
ADCLK=1;
ADCLK=0; //拉低CLK端,形成下降沿3
ADDIO=1;
for(i=0;i<8;i++)
{
ADCLK=1;
ADCLK=0; //形成一次时钟脉冲
if(ADDIO)
dat|= 0x80>>i; //收数据
}
ADCS=1; //拉低CS端
ADCLK=1;
ADDIO=1; //拉高数据端,回到初始状态
return(dat); //return dat
}
/***************************************************************************/
/********************************************************/
void displayRH() //下限显示
{write_com(0xc0+3);
write_date(RH/100%10+0x30);//上限百位
write_date(RH/10%10+0x30);//上限十位
//write_date('.');
//write_date(RH%10+0x30);
}
void displayRL() //下限显示
{write_com(0xca);
write_date('R');
write_date('L');
write_date(':');
write_date(RL/100%10+0x30);//下限百位
write_date(RL/10%10+0x30);//下限十位
write_date('%');
}
/**************************************************/
/********************************************************/
void keyscan() //按键处理
{bit kk1=0,kk2=0;
if(key1==0)
{delay(30);
while(key1==0);
if(key>=2)
{key=0;
}
else
{key++;
}
switch(key)
{speak=1;kk2=motor;motor=1;
case 1:{write_com(0x0f);write_com(0xce); //光标闪烁
while(key1!=0) //等待按键松开
{
if(key2==0) //key2按键下
{delay(30); //按键延时消抖
if(key2==0) //确定key2按下
{
while(key2==0); //等待松开
if(RL>=998)
{RL=999; //RL下限最大设置为99
}
else
{RL+=10; //RL加1
}
}
displayRL(); //调用RL下限显示函数
write_com(0xce);
}
if(key3==0) //key3按下
{delay(30); //按键延时消抖
if(key3==0) //确定key3按下
{
while(key3==0); //等待key3按键松开
if(RL<=1) //RL最小设置为1
{RL=0;
}
else
{RL-=10; //RL下限减1
}
}
displayRL(); //调用RL下限显示函数
write_com(0xce);
}
}while(key1==0);
}
case 2:{write_com(0x0f);write_com(0xc4); //RH设置数据,光标闪烁
while(key1==1)
{
if(key2==0) //key2按下
{delay(30); //按键延时消抖
if(key2==0) //确定key2按下
{
while(key2==0); //等待松开
if(RH>=998) //RH最大设置为99
{RH=999;
}
else
{RH+=10; //RH加1
}
}
displayRH(); //RH上限显示函数
write_com(0xc4);
}
if(key3==0) //key3按下
{delay(30); //按键延时消抖
if(key3==0) //确定按下
{
while(key3==0);//等待松开
if(RH<=1) //RH最小设置为1
{RH=0;
}
else
{RH-=10; //RH减1
}
}
displayRH(); //调用RH显示函数
write_com(0xc4);
}
}
while(key1==0);
}
case 0:{write_com(0x0c);
motor=kk2;
break;}
}
}
}
/**************************************************/
void Conut(void) //土壤检测数据转换
{
v=Adc0832();
temp=v;
temp_f=temp*9.90/2.55;
temp=temp_f;
temp=1000-temp;
write_com(0x80+10);
write_date(temp/100%10+0x30);//千位
write_date(temp/10%10+0x30);//百位
write_date('.');
write_date(temp%10+0x30);
write_date('%');//显示符号位
}
/********************************************************/
void main(void)
{
lcdinit();
init();
displayRH(); //显示上限
displayRL(); //显示下限
delay(50); //启动等待,等LCD讲入工作状态
delay(50); //延时片刻(可不要)
delay(50); //延时
delay(50);
Conut(); //显示函数
delay(150);
while(1)
{
Conut(); //显示当前湿度
keyscan();
if(temp>RH) //如果湿度大于上限停止浇水
{motor=1; //关闭继电器
}
else if(temp<RL) //如果湿度小于RL下限启动浇水
{motor=0; //启动继电器
}
if(temp<RL) //小于下限启动报警并浇水
{speak=0; //启动报警
delay(150); //延时
speak=1;
}
keyscan(); //按键检测
delay(150); //延时50MS
}
}
















 1179
1179

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











