







本博客中的所有设置都是在 Cubase 卷帘钢琴窗 进行的 ;
一、要解决的问题
Cubase 中使用 MIDI 钢琴键盘输入的音符 , 其起始时间 , 持续时间 , 结束时间都不是很标准 , 如果显示成简谱就会很乱 ;

二、量化预置
量化预置 参数设置 : 点击下图的红色矩形框 , 在弹出的列表中选择量化预置参数 ;
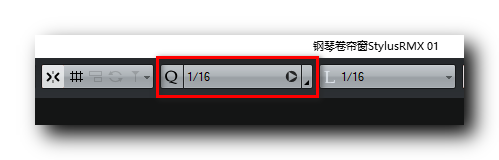
该参数主要控制当前的界面中显示的每拍有多少格子 , 如果选择 " 1/16 " 此时每拍被切割成了四份 , 当前是 4/4 拍 , 一个全音符有 4 拍 , 显示每个 16 分音符的格子 ;

这是设置了 " 1/32 " 量化预置参数 , 每拍显示 8 个格子 , 每个格子的长度是 32 分音符 ;

三、长度量化
长度量化 参数设置 : 在下图  处设置长度量化 , 如果设置成 " 1/16 " , 那么使用鼠标拖动时 , 音符的长度只能是 16 分音符的整数倍 ;
处设置长度量化 , 如果设置成 " 1/16 " , 那么使用鼠标拖动时 , 音符的长度只能是 16 分音符的整数倍 ;

上述的 量化预置 和 长度量化 参数 , 要结合起来使用 , 一般设置成一样的 ;
四、快捷键及设置
1、快捷键及设置
Cubase 量化快捷键设置 : 选择 " 文件 / 快捷键…(K) " 选项 , 在弹出的对话框中设置快捷键 ;

2、量化开头
量化开头 : 默认按键 " Q Q Q " 是量化开头 ; 将所有音符的开始位置对齐到 " 量化预制 " 对应的格子中 ; 该设置是系统自带的 , 不建议修改 ;

3、量化 MIDI 事件结尾
量化 MIDI 事件结尾 :
首先选中左侧的 " 量化类别 / 量化 MIDI 事件结尾 " , 点击右侧的 " 输入快捷键 " 下方的输入框 ;

输入快捷键后 , 点击 " 指定 " 按钮 , 然后点击确定 , 此时 " 量化 MIDI 事件结尾 " 操作就被指定了快捷键 " Ctrl + F12 " ;

4、量化 MIDI 事件长度
量化 MIDI 事件长度 : 使用相同设置 , 为其设置 " Ctrl + F11 " 快捷键 ;

注意选择的 " 量化预置 " 与 " 长度量化 " 参数 , 都是 " 1/16 " 设置 ;
五、对 MIDI 进行量化操作
" Ctrl + A " 选中所有音符 ;

使用 " Q " 快捷键 , 量化开头 , 此时可以看到每个音符的开头位置都对齐到了 " 1/16 " 格子上 ;

量化音符开头后 , 在使用 " Ctrl + F12 " 快捷键 , 量化音符长度 , 此时音符都排列整齐了 , 音符开头和音符长度进行了量化 , 音符结尾自然也进行了量化 ;


















 1124
1124

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









