







拓扑排序与关键路径是有向无环图上的应用。两种算法使用同一种动态规划的思想,因此关键路径的代码几乎和拓扑排序完全一样。
(一)拓扑排序
对一个有向无环图(Directed Acyclic Graph简称DAG)G进行拓扑排序,是将G中所有顶点排成一个线性序列,使得图中任意一对顶点u和v,若边<u,v>∈E(G),则u在线性序列中出现在v之前。通常,这样的线性序列称为满足拓扑次序(Topological Order)的序列,简称拓扑序列。简单的说,由某个集合上的一个偏序得到该集合上的一个全序,这个操作称之为拓扑排序。
拓扑排序的目的是得到一个满足条件的序列,这样的序列可能有多种。如下图拓扑序列就有
C1 , C2 , C3 , C4 , C5 , C6 , C8 , C9 , C7 或 C1 , C8 , C9 , C2 , C5 , C3 , C4 , C7 , C6
另外,存储结构差异(邻接矩阵和邻接表)也可能导致序列不同。
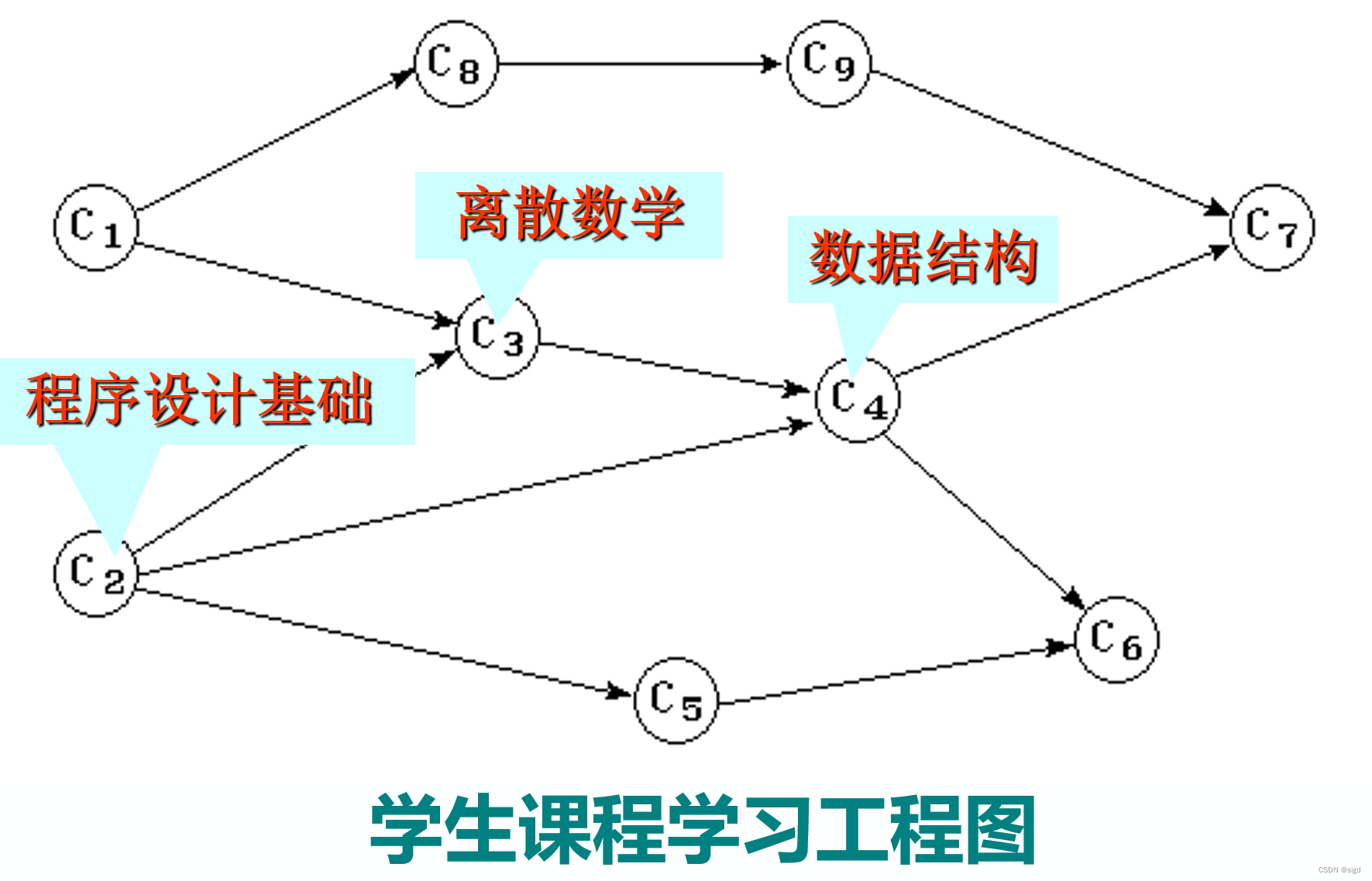
算法实现:要想输出上图C4,必须先输出其前驱结点C2和C3,这实际上是一种动态规划思想。此处采用递推实现,例如输出C2时,将这一信息传递给C2的邻接点C3和C5。为了完成信息传递,使用一个数组d来存储每个点的入度,当结点X的前驱结点Y输出时,将X的入度减一,如果入度减一后为0,那么结点X所有前驱都已经输出,此时X可以输出。通常使用队列(也可以用其他查找结构)来存储这些度为0的结点。下为18734 拓扑排序代码。
#include <iostream>
#include <queue>
using namespace std;
int n,m,e[105][105],d[105];
int main()
{
int i,j,x,y,z;
cin>>n>>m;
for(i=1;i<=m;i++)
{
cin>>x>>y;
e[x][y]=1;
d[y]++;/**< 统计入度 */
}
//int q[1005],f=0,r=0;
priority_queue<int,vector<int>,greater<int> > q;
for(i=1;i<=n;i++)/**< 题目要求拓扑序列字典序最小,所以用优先队列存储度为0 */
if(d[i]==0)
q.push(i);
while(!q.empty())
{
int t=q.top();
q.pop();
cout<<t<<' ';
for(i=1;i<=n;i++)
if(e[t][i])
{
d[i]--;
if(d[i]==0)/**< 度为0入队 */
q.push(i);
}
}
return 0;
}
(二)关键路径
图结构中从起点到终点的最长路径,常用于计算工程项目的最早完成时间。下图起点1到终点6的关键路径(最长路径)为1456。
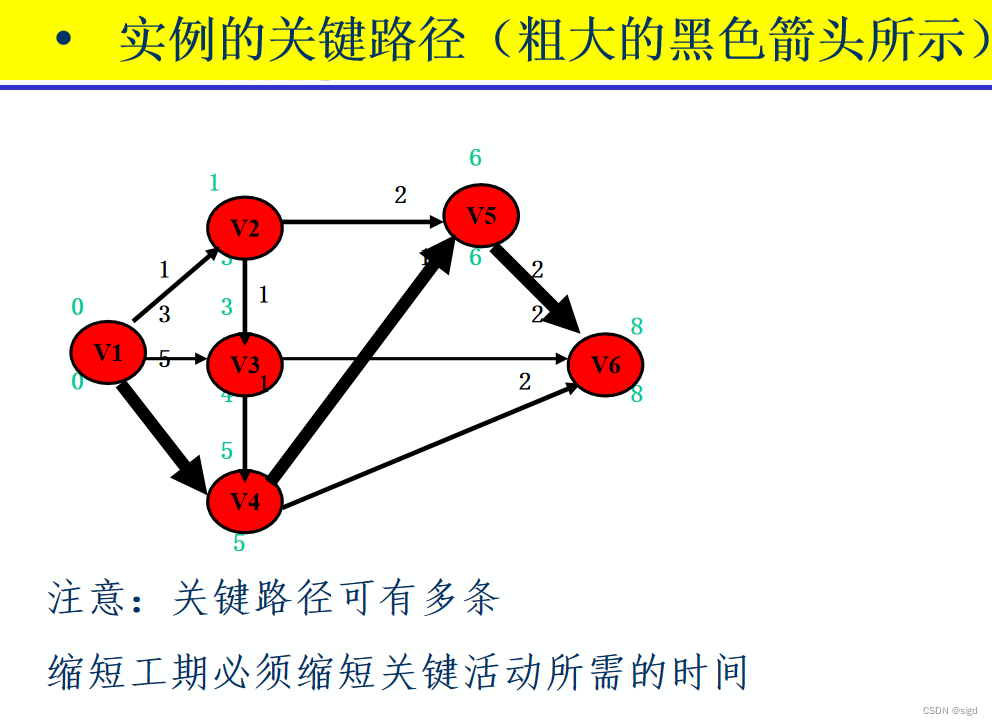
算法思路:如上图V5的路径必须经过V2或V4,因此V5最长路径dis[5]的值由dis[2]和dis[4]决定。
dis[5]=max(dis[2]+(2,5),dis[4]+(4,5)]
算法使用拓扑排序相同的处理过程,在拓扑排序过程中计算最长路径(最早发生时间)。
#include <iostream>
#include <queue>
using namespace std;/**< dis数组记录路径长度 */
int n,m,a[105][105],v[1005],d[1005],dis[1005];
int main()
{
ios::sync_with_stdio(0),cin.tie(0);
int i,j,x,y,z;
cin>>n>>m;
for(i=1; i<=m; i++)
{
cin>>x>>y>>z;
a[x][y]=z;
d[y]++;
}
queue<int>q;
q.push(1);/**< 唯一入度为0的点 */
while(!q.empty())
{
int t=q.front();
q.pop();
for(i=1; i<=n; i++)
{
if(a[t][i])
{ /**< 关键路径和拓扑排序唯一区别在于此处计算最长路径 */
dis[i]=max(dis[i],dis[t]+a[t][i]);
d[i]--;
if(d[i]==0)
q.push(i);
}
}
}
cout<<dis[n];
return 0;
}那么如何得到关键路径呢?此处并没有使用教材上的求最迟发生时间的方法。可以借鉴求最短路径的方法,用一个p数组记录前驱结点。
#include <iostream>
#include <queue>
using namespace std;/**< dis数组记录路径长度 */
int n,m,a[105][105],v[1005],d[1005],dis[1005],path[105];
void print(int x)/**< 递归输出最长路径结点序列 */
{
if(x==0)
return ;
print(path[x]);
cout<<x<<' ';
}
int main()
{
ios::sync_with_stdio(0),cin.tie(0);
int i,j,x,y,z;
cin>>n>>m;
for(i=1; i<=m; i++)
{
cin>>x>>y>>z;
a[x][y]=z;
d[y]++;
}
queue<int>q;
q.push(1);/**< 唯一入度为0的点 */
while(!q.empty())
{
int t=q.front();
q.pop();
for(i=1; i<=n; i++)
{
if(a[t][i])
{
/**< 关键路径和拓扑排序唯一区别在于此处计算最长路径 */
if(dis[i]<dis[t]+a[t][i])
{
dis[i]=dis[t]+a[t][i];
path[i]=t;/**< 记录i的前驱结点为t */
}
d[i]--;
if(d[i]==0)
q.push(i);
}
}
}
//print(n);
cout<<dis[n];
return 0;
}















 9537
9537











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









