







情境引入:
在前面我们学过AOV网,AOV网用来确定活动之间的优先顺序。
在实际应用中,活动之间除了先后顺序外,还有时间上的约束。
在一个表示工程的带权有向图中,用顶点表示时间,用边表示活动,边上的权值表示活动的持续时
间,这样的有向图被叫做:“AOE”网。
通常,AOE网可以用来估测工程的完成时间。
AOE网中,入度为0的顶点叫做:“源点”,出度为0的顶点叫做:“汇点”。
为此我们得到AOE网的两条重要性质:
1.只有在某顶点所代表的事件发生后,从该顶点出发的各活动才能开始。
2.只有在进入某时间的全部活动结束后,该事件才能开始。
因此完成工程的最短时间就是从源点到汇点的最短路径长度。具有最长长度的路径被叫作:“关键
路径”,路径长度是指路径上的各权度之和。关键路径上的活动被叫作关键活动。
而想要缩短工期,则必须对关键活动下手,为此我们可以设计一个算法来实现这个功能。
代码部分:
#include<stdio.h>
#include<malloc.h>
#define MAX 100
typedef struct ArcNode{
int adjvex;
int weight;
struct ArcNode *nextarc;
}ArcNode;
typedef struct VNode{
char vertex;
ArcNode *firstarc;
}VNode;
typedef VNode Adjlist[MAX];
typedef struct ALGraph{
Adjlist adjlist;
int vexnum;
int arcnum;
}ALGraph;
int LocateVertex(ALGraph *G,char v) //查询顶点在邻接图中的位置
{
int num;
for(num=0;num<G->vexnum;num++)
if(G->adjlist[num].vertex == v)
return num;
return -1;
}
void CreateALGraph(ALGraph *G) //创建邻接图
{
int i,weight;
int num1,num2;
char v1,v2;
printf("请输入顶点数和边数:\n");
scanf("%d %d",&G->vexnum,&G->arcnum);
getchar();
printf("请输入:{%d}个顶点\n",G->vexnum);
for(i=0;i<G->vexnum;i++){
scanf("%c",&G->adjlist[i].vertex);
G->adjlist[i].firstarc = NULL;
}
getchar();
printf("请输入:{%d}条边,格式->(v1 v2 权值)\n",G->arcnum);
for(i=0;i<G->arcnum;i++){
scanf("%c %c %d",&v1,&v2,&weight);
getchar();
num1 = LocateVertex(G,v1);
num2 = LocateVertex(G,v2);
if(num1 == -1 || num2 == -1){
printf("失败.num1->{%d}、num2->{%d}\n",num1,num2);
i = i - 1;
continue;
}
else{
ArcNode *tmp = (ArcNode*)malloc(sizeof(ArcNode));
tmp->adjvex = num2;
tmp->weight = weight;
tmp->nextarc = G->adjlist[num1].firstarc;
G->adjlist[num1].firstarc = tmp;
printf("成功.\n");
}
}
}
void FindInDegree(ALGraph *G,int *indegree) //查找图中所有顶点入度
{
ArcNode *tmp = NULL;
int i;
for(i=0;i<G->vexnum;i++){
indegree[i] = 0;
}
for(i=0;i<G->vexnum;i++){
tmp = G->adjlist[i].firstarc;
while(tmp){
indegree[tmp->adjvex]++;
tmp = tmp->nextarc;
}
}
}
void CriticalPath(ALGraph *G,int n) //求关键路径函数,n是图中顶点个数
{
ArcNode *tmp = NULL;
int i,v,weight,num,indegree[n];
int ee,el,sum = 0; //ee和el指针
int ve[n],vl[n]; //ve和vl数组
int top1 = 0,top2 = 0; //top1和top2两个栈顶指针
FindInDegree(G,indegree); //top1是正向拓扑排序指针,top2是逆向拓扑排序指针
for(i=0;i<G->vexnum;i++) //最早发生时间ve数组赋初值0
ve[i] = 0;
for(i=0;i<G->vexnum;i++){ //入度为0的顶点入栈(正序栈)
if(indegree[i] == 0){
indegree[i] = top1;
top1 = i + 1;
}
}
while(top1!=0){ //正序栈出栈,同时也是拓扑排序遍历
v = top1 - 1;
top1 = indegree[v]; //出栈
indegree[v] = top2; //构建逆序栈,为逆拓扑排序准备
top2 = v + 1; //逆拓扑栈顶指针加一
tmp = G->adjlist[v].firstarc;
while(tmp){ //进入单个邻接单元的nextarc循环中
weight = tmp->weight;
num = tmp->adjvex;
if(ve[v] + weight > ve[num]){ //永远使ve[i]中所存的是当前消去顶点后的最大值.
ve[num] = ve[v] + weight;
}
if(--indegree[num] == 0){ //减去一个顶点,对应边也要减去,因此邻接边的入度要减少1
indegree[num] = top1; //如果减1后等于0,需要入栈成为一个新的拓扑点
top1 = num + 1;
}
tmp = tmp->nextarc;
}
}
for(i=0;i<G->vexnum;i++){
vl[i] = ve[top2-1]; //vl数组初始化,全部用逆拓扑排序的起点。
}
while(top2!=0){
v = top2 - 1; //出栈,逆拓扑排序
top2 = indegree[v];
tmp = G->adjlist[v].firstarc;
while(tmp){
num = tmp->adjvex;
weight = tmp->weight;
if(vl[num] - weight < vl[v]){ //vl中所存的一定是最小的数值
vl[v] = vl[num] - weight;
}
tmp = tmp->nextarc;
}
}
for(i=0;i<G->vexnum;i++){ //关键路径遍历循环
tmp = G->adjlist[i].firstarc;
while(tmp){
num = tmp->adjvex;
weight = tmp->weight;
ee = ve[i]; //ee==ve
el = vl[num] - weight; //el==vl - weight
if(ee == el){ //如果ee==el那么说明是一个关键路径
printf("边<%c,%c>输出,权值为:{%d}\n",G->adjlist[i].vertex,G->adjlist[num].vertex,weight);
sum += weight;
}
tmp = tmp->nextarc;
}
}
printf("因此关键路径长度为:{%d}\n",sum);
}
int main()
{
ALGraph G;
CreateALGraph(&G);
CriticalPath(&G,G.vexnum);
return 0;
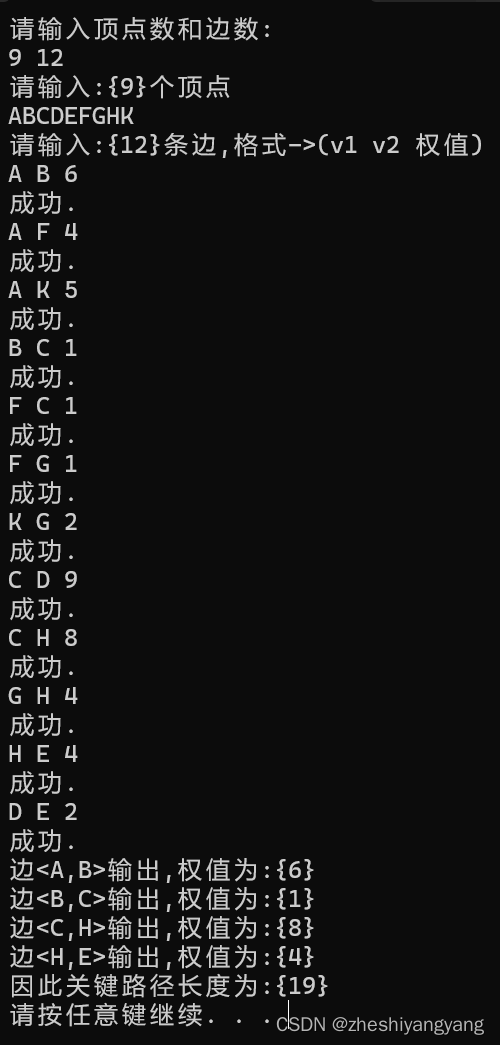
}例子:
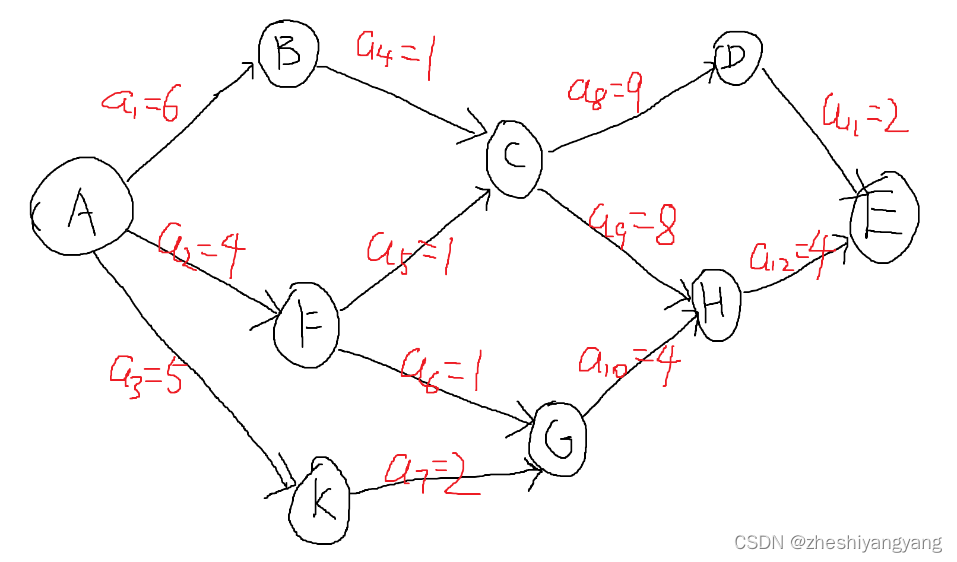
上面的例子共ABCDEFGHK九个事件(顶点),共a1->a12(12个活动)。
算法思想:
在知道AOE网的两条性质后,我们很容易的想到算法:
我们先定义下面四个“参量”:
事件的最早发生时间->“ve”,事件的最迟发生时间->"vl",活动的最早发生时间->"ee",活动的最迟
发生时间->"el"。
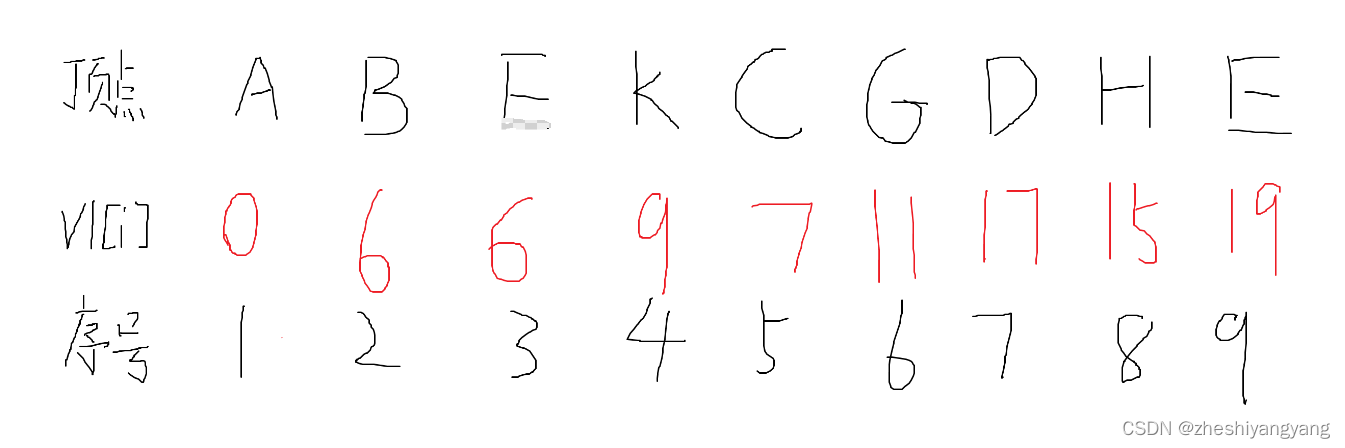
1.事件的最早发生时间
ve指的是从源点到顶点V的最长路径长度
这个长度决定了所有从顶点ve发出的活动能够开工的最早时间。
因此ve的大小取决于最慢的那个活动,也就是:
ve[k] = max{ve[j] + dut<ve[j],ve[k]>}
例如上面的例子,我们可以得到下面的最长路径长度:
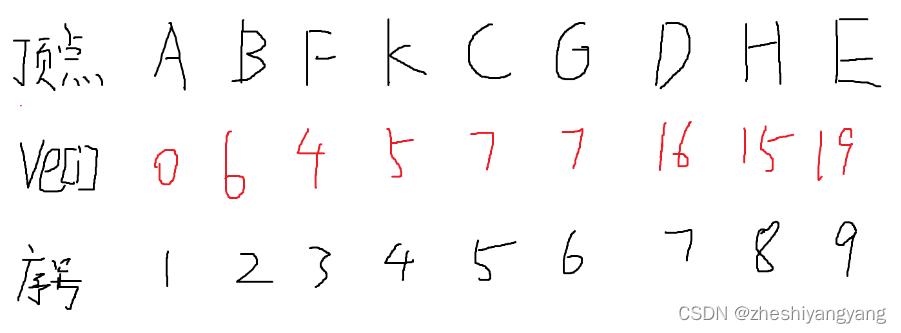
2.事件的最晚发生时间
事件的最晚发生时间通俗点来说,就是在查找到事件的最早发生时间之后,通过逆序的顺序,依次
减去各边最大值求得。
公式为:
vl[j] = min{ve[k] - dut<v[j],v[k]>}
根据上面的的解释,我们可以得到这个例子的vl如下:
3.活动的最早发生时间
活动的最早发生时间等于事件的最早发生时间,这是由AOE网的性质决定的,只有当某个事件发生
了,某个活动才会发生。
因此我们可以得到:

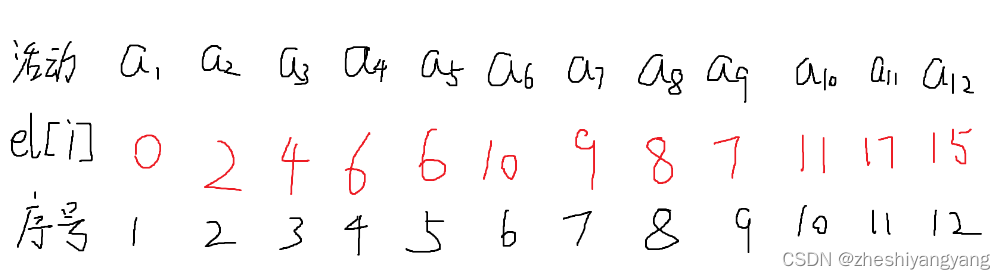
4.活动的最晚发生时间
活动的最晚发生时间是指,在不推迟整个工期的前提下的时间。
因此,有公式:
el[i] = {vl[k] - dut<i,k>}
通过上式,我们可以得到:
验证部分:
















 442
442











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











