







 本文详细介绍了步进电机的驱动方式,如PWM模式、翻转模式及各种加减速策略(梯形、S形),并重点讨论了闭环系统的原理,包括增量式和位置式,以及闭环系统如何通过编码器实现位置控制。
本文详细介绍了步进电机的驱动方式,如PWM模式、翻转模式及各种加减速策略(梯形、S形),并重点讨论了闭环系统的原理,包括增量式和位置式,以及闭环系统如何通过编码器实现位置控制。
电机-步进电机驱动
■ 步进电机驱动
■ 步进电机-PWM 模式驱动
PWM 模式, 进入一次更新中断输出一个脉冲,即发生一次中断对应一个完整脉冲;
stepper_init(1000 - 1, 168 - 1);这个语句,这两个形参分别设置自动重载寄存器的值为1000,以及定时器预分频系数为 168。
168MHZ / 168 = 1MHz 计数 1000 次就是 1kz 的频率脉冲;
■ 步进电机-翻转模式
比较输出翻转模式需要进入两次输出中断才为一个完整脉冲。
中断函数里边不断修改比较值让其源源不断输出脉冲
■ 步进电机-梯形加减速
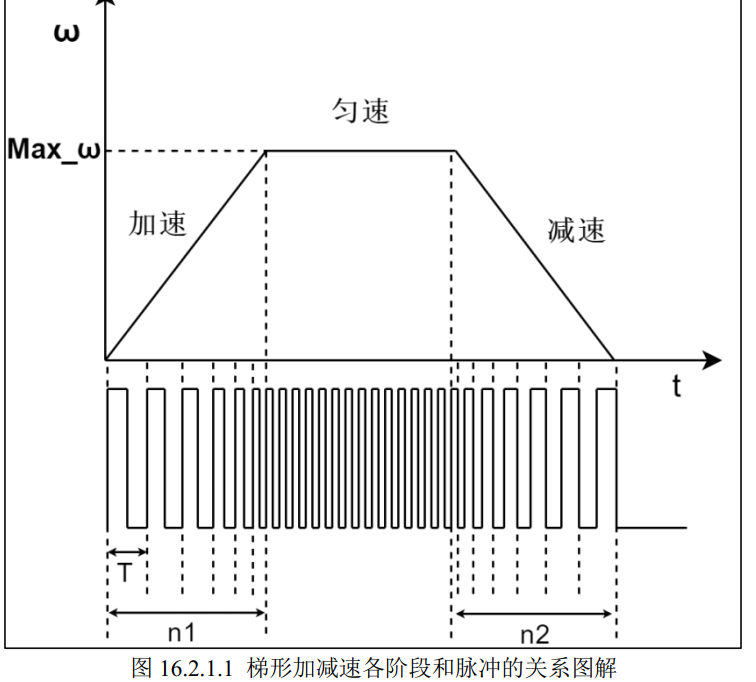
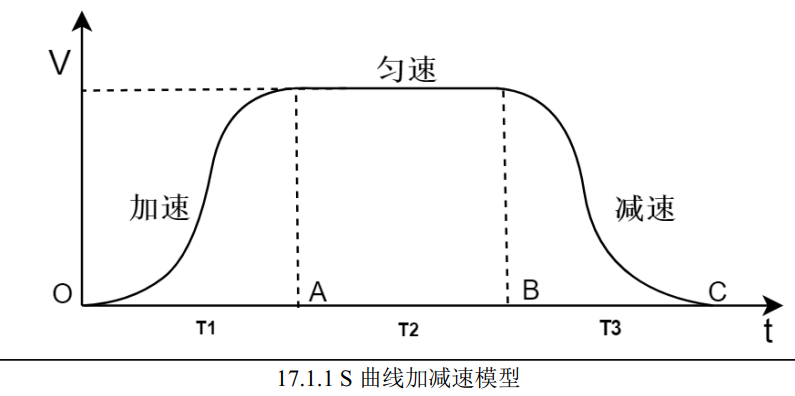
滑块的速度变化一共分为三个阶段, OA 段其实就是滑块的加速部分、 AB 则是匀速部分, BC 则是减速部分。
在加减速段的过程中,速度是不断的改变的,所以需改变脉冲的频率.
在匀速运动的过程中,脉冲的频率是固定不变的.
在减速时给低频率脉冲.
泰勒公式的一个特例麦克劳林公式
■ 步进电机-S形加减速
■ 步进电机-直线插补
■ 步进电机-圆弧插补
■ 步进电机-闭环系统
开环能力,控制器不需要传感器反馈电机信号
■ 闭环系统原理
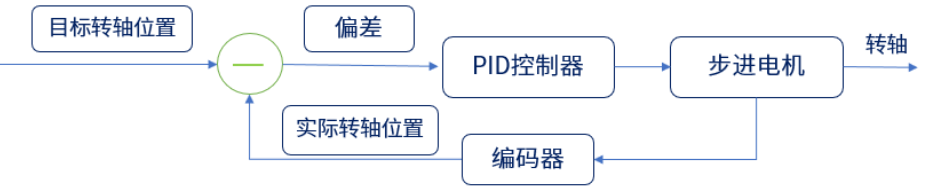
编码器作为反馈通道, 反馈步进电机的实际位置, 系统将实际位置与目标位置进行比较, 计算差值,再把偏差值代入到 PID 控
制器中,之后控制器输出期望值,最后作用于步进电机使其旋转至指定位置停止!这就是位置闭环控制。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











