







博客:http://blog.csdn.net/qianxin_dh
邮箱:qianxin_dh@163.com
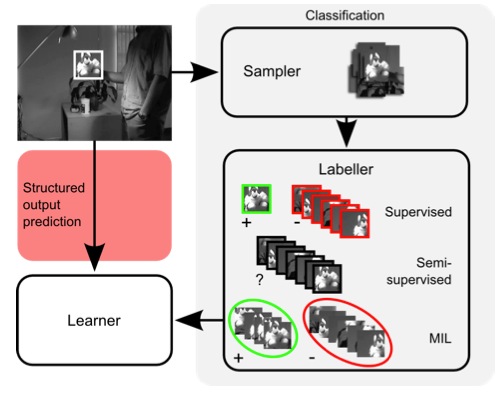
《Struck:Structured Output Tracking with Kernels》是 Sam Hare, Amir Saffari, Philip H. S. Torr等人于2011年发表在Computer Vision (ICCV)上的一篇文章。Struck与传统跟踪算法的不同之处在于:传统跟踪算法(下图右手边)将跟踪问题转化为一个分类问题,并通过在线学习技术更新目标模型。然而,为了达到更新的目的,通常需要将一些预估计的目标位置作为已知类别的训练样本,这些分类样本并不一定与实际目标一致,因此难以实现最佳的分类效果。而Struck算法(下图左手边)主要提出一种基于结构输出预测的自适应视觉目标跟踪的框架,通过明确引入输出空间满足跟踪功能,能够避免中间分类环节,直接输出跟踪结果。同时,为了保证实时性,该算法还引入了阈值机制,防止跟踪过程中支持向量的过增长。
最后,大牛作者们也提供了c++版源代码,有兴趣的朋友可以下载下来,体验下该算法的强大。代码下载地址:https://github.com/gnebehay/STRUCK,代码调试需要Opencv2.1以上版本以及Eigen v2.0.15。
在论文理解以及代码调试的过程中,主要参考了以下资料,感到获益匪浅,列举如下:
1) Eigen的安装及学习
2) 支持向量机通俗导论(理解SVM的三重境界)
http://blog.csdn.net/v_july_v/article/details/7624837
第二部分
目前在目标检测任务中,由于svm自身具有较好的推广能力以及对分类的鲁棒性,得到了越来越多的应用。 Struck算法便使用了在线结构输出svm学习方法去解决跟踪问题。不同于常规算法训练一个分类器,Struck算法直接通过预测函数: ,来预测每帧之间目标位置发生的变化,其中
,来预测每帧之间目标位置发生的变化,其中 表示搜寻空间,例如,
表示搜寻空间,例如, ,上一帧中目标的新位置为Pt-1,则在当前帧中,目标位置就为
,上一帧中目标的新位置为Pt-1,则在当前帧中,目标位置就为 (可见其实就是表示帧间目标位置变化关系的集合)。因此,在Struck算法中,已知类型的样本用(x,y)表示,而不再是(x,+1)或者(x,-1)了。
(可见其实就是表示帧间目标位置变化关系的集合)。因此,在Struck算法中,已知类型的样本用(x,y)表示,而不再是(x,+1)或者(x,-1)了。
,来预测每帧之间目标位置发生的变化,其中表示搜寻空间,例如,,上一帧中目标的新位置为Pt-1,则在当前帧中,目标位置就为(可见其实就是表示帧间目标位置变化关系的集合)。因此,在Struck算法中,已知类型的样本用(x,y)表示,而不再是(x,+1)或者(x,-1)了。
那么y预测函数怎么获得呢?这就需要用到结构输出svm方法了(svm基本概念学习可参考我上篇文章中给出的svm三重境界的链接),它在该算法中引入了一个判别函数 ,通过公式
,通过公式 找到概率最大的对目标位置进行预测,也就是说,因为我们还不知道当前帧的目标位置,那么我们首先想到在上一帧中的目标能够通过一些位置变化关系,出现在当前帧中的各处,但是呢,实际的目标只有一个,所以这些变换关系中也必然只有一个是最佳的,因此,我们需要找到这个最佳的,并通过,就可以成功找到目标啦~,至于搜寻空间如何取,在程序解读时大家就会看到了。
找到概率最大的对目标位置进行预测,也就是说,因为我们还不知道当前帧的目标位置,那么我们首先想到在上一帧中的目标能够通过一些位置变化关系,出现在当前帧中的各处,但是呢,实际的目标只有一个,所以这些变换关系中也必然只有一个是最佳的,因此,我们需要找到这个最佳的,并通过,就可以成功找到目标啦~,至于搜寻空间如何取,在程序解读时大家就会看到了。
怎么获得呢?这就需要用到结构输出svm方法了(svm基本概念学习可参考我上篇文章中给出的svm三重境界的链接),它在该算法中引入了一个判别函数,通过公式找到概率最大的对目标位置进行预测,也就是说,因为我们还不知道当前帧的目标位置,那么我们首先想到在上一帧中的目标能够通过一些位置变化关系,出现在当前帧中的各处,但是呢,实际的目标只有一个,所以这些变换关系中也必然只有一个是最佳的,因此,我们需要找到这个最佳的,并通过,就可以成功找到目标啦~,至于搜寻空间如何取,在程序解读时大家就会看到了。
那么如何找到 呢?我个人理解是:将判别函数形式转换为:
呢?我个人理解是:将判别函数形式转换为: ,其中,
,其中, 表示映射函数,是从输入空间到某个特征空间的映射,进而实现对样本线性可分。因为当分类平面(输入空间中的超平面)离数据点的“间隔”越大,分类的确信度越大,所以需让所选择的分类平面最大化这个“间隔”值,这里我们通过最小化凸目标函数
表示映射函数,是从输入空间到某个特征空间的映射,进而实现对样本线性可分。因为当分类平面(输入空间中的超平面)离数据点的“间隔”越大,分类的确信度越大,所以需让所选择的分类平面最大化这个“间隔”值,这里我们通过最小化凸目标函数 来实现,该函数应满足条件:
来实现,该函数应满足条件: 和
和 ,其中,
,其中, ,
, (
( 表示两个框之间的覆盖率)。优化的目的是确保F(目标)>>F(非目标)。
表示两个框之间的覆盖率)。优化的目的是确保F(目标)>>F(非目标)。
呢?我个人理解是:将判别函数形式转换为:,其中,表示映射函数,是从输入空间到某个特征空间的映射,进而实现对样本线性可分。因为当分类平面(输入空间中的超平面)离数据点的“间隔”越大,分类的确信度越大,所以需让所选择的分类平面最大化这个“间隔”值,这里我们通过最小化凸目标函数来实现,该函数应满足条件:和,其中,,(表示两个框之间的覆盖率)。优化的目的是确保F(目标)>>F(非目标)。
接下来问题又来了,如何获得最小的w??文中采取的求解方式是利用拉格朗日对偶性,通过求解与原问题等价的对偶问题(dual problem),得到原始问题的最优解。通过给每一个约束条件加上一个拉格朗日乘子alpha,定义拉格朗日函数L(w,b,alpha)。一般对偶问题的求解过程如下:1)固定alpha,求L关于w,b的最小化。2)求L对alpha的极大。3)利用SMO算法求得拉格朗日乘子alpha。为了简化对偶问题求解,这里定义了参数beta,可见论文中的Eq.(8)。
算法主要流程:
1. 首先读入config.txt,初始化程序参数,这一过程主要由Config类实现;
2. 判断是否使用摄像头进行跟踪,如使用摄像头进行跟踪,则initBB=(120,80,80,80);
若使用视频序列进行跟踪,initBB由相应txt文件给出;
3. 将读入的每帧图像统一为320*240。
4. 由当前第一帧以及框initBB,实现对跟踪算法的初始化。
4.1 Initialise(frame,bb)
由于我们之前获取的initBB的坐标定义为float型,在这里首先将其转换为int型。
程序中选取haar特征,gaussian核函数, 初始化参数m_needsIntegralImage=true,m_needsIntegralHist=false。因此在这里,ImageRep image()主要实现了积分图的计算(如果特征为histogram,则可实现积分直方图的计算)。ImageRep类中的类成员包括frame,积分图,积分直方图。
4.2 UpdateLearner(image)
该函数主要实现对预测函数的更新,首先通过RadialSamples()获得5*16=80个样本,再加上原始目标,总共含有81个样本。之后判断这81个样本是否有超出图像边界的,超出的舍弃。将剩余的样本存入keptRects,其中,原始目标样本存入keptRects[0]。定义一个多样本类MultiSample,该类中的类成员主要包括样本框以及ImageRep image。并通过Update(sample,0)来实现预测函数的更新。
4.3 Update(sample,0)
该函数定义在LaRank类下,文章中参考文献《Solving multiclass support vector machines with LaRank》提到了这种算法。当我们分析LaRank头文件时,可看到struck算法重要步骤全部聚集在这个类中。该类中的类成员包括支持模式SupportPattern,支持向量SupportVector,Config类对象m_config,Features类对象m_features,Kernel类对象m_kernel,存放SupportPattern的m_sps,存放SupportVector的m_svs,用于显示的m_debugImage,目标函数中的系数m_C,矩阵m_K。
查看
SupportPattern的定义,我们知道该结构主要包括x(存放特征值),yv(,存放目标变化关系),images(存放图片样本),y(索引值,表明指定样本存放位置),refCount(统计sv的个数??)。
同样,查看SupportVector的定义可知,该结构包括一个
SupportPattern,y(索引值,表明指定样本存放位置),b(beta),g(gradient),image(存放图片样本)。
,存放目标变化关系),images(存放图片样本),y(索引值,表明指定样本存放位置),refCount(统计sv的个数??)。
同样,查看SupportVector的定义可知,该结构包括一个
SupportPattern,y(索引值,表明指定样本存放位置),b(beta),g(gradient),image(存放图片样本)。
在函数Update(sample,0)中,定义了一个SupportPattern* sp。首先对于每个样本框,其x,y坐标分别减去原始目标框的x,y坐标,将结果存入sp->yv。然后对于每个样本框内的图片统一尺寸为30*30,并存入sp->images。对于每个样本框,计算其haar特征值,并存入sp->x。令sp->y=y=0,sp->refCount=0,最后将当前sp存入m_sps。
4.3.1 ProcessNew(int ind)
之后执行ProcessNew(int ind),其中ind=m_sps.size()-1。由于每处理一帧图像,m_sps的数量都增加1,这样定义ind能够保证ProcessNew所处理的样本都是最新的样本。
在
ProcessNew处理之前,
首先看函数AddSupportVector(SupportPattern* x,int y,double g)的定义:
SupportVector* sv=new SupportVector;定义了一个支持向量。
为支持向量赋初值:sv->b=0.0,sv->x=x,sv->y=y,sv->g=g,并将该向量存入m_svs。接下来通过调用Kernel类中的Eval()函数更新核矩阵,即m_K,以后用于Algorithm 1
计算。
现在再回到ProcessNew函数:
第一个AddSupportVector(),
将目标框作为参数,增加一个支持向量
存入m_svs,此时,m_svs.size()=1,m_K(0,0)=1.0,函数返回ip=0。
之后执行MinGradiernt(int ind),求得公式10中的g最小值。返回最小梯度的数值以及对应的样本框存放位置。
第二个
AddSupportVector(),将具有最小梯度的样本框作为参数,增加一个特征向量存入m_svs,此时,m_svs.size()=2,并求得m_K(0,1),m_K(1,0),m_K(1,1)。函数返回in=1。
之后进行SMO算法进行计算,若某向量的beta值为0,则舍弃该支持向量。
4.3.2 BudgetMaintenance()
再之后执行函数BudgetMaintenance(),保证支持向量个数没有超过100。
4.3.3 Reprocess()
进行Reprocess()步骤,一个Reprocess()包括1个ProcessOld()和10个Optimize();
ProcessOld()主要对已经存在的SupportPattern进行随机选取并处理。和ProcessNew不同的地方是,这里将满足梯度最大以及满足 的支持向量作为正支持向量。负支持向量依然根据梯度最小进行选取。之后再次执行SMO算法,判断这些支持向量是否有效。
的支持向量作为正支持向量。负支持向量依然根据梯度最小进行选取。之后再次执行SMO算法,判断这些支持向量是否有效。
的支持向量作为正支持向量。负支持向量依然根据梯度最小进行选取。之后再次执行SMO算法,判断这些支持向量是否有效。
Optimize()也是对已经存在的SupportPattern进行随机选取并处理,但仅仅是对现有的支持向量的beta值进行调整,并不加入新的支持向量。正负支持向量的选取方式和ProcessOld()一样。
4.3.4 BudgetMaintenance()
执行函数BudgetMaintenance(),保证支持向量个数没有超过100。
5.跟踪模块(Algorithm 2)
首先通过ImageRep image()实现积分图的计算,然后进行抽样(这里抽样的结果和初始化时的抽样结果不一样,大概抽取几千个样本)。将超出图像范围的框舍弃,剩余的保留在keptRects中。对keptRects中的每一个框,计算F函数,即 ,将结果保存在scores里,并记录值最大的那一个,将其作为跟踪结果。
UpdateDebugImage()函数主要实现程序运行时显示的界面。
UpdateLearner(image)同步骤4一致。
,将结果保存在scores里,并记录值最大的那一个,将其作为跟踪结果。
UpdateDebugImage()函数主要实现程序运行时显示的界面。
UpdateLearner(image)同步骤4一致。
,将结果保存在scores里,并记录值最大的那一个,将其作为跟踪结果。
UpdateDebugImage()函数主要实现程序运行时显示的界面。
UpdateLearner(image)同步骤4一致。
main.cpp
- /*
- * Struck: Structured Output Tracking with Kernels
- *
- * Code to accompany the paper:
- * Struck: Structured Output Tracking with Kernels
- * Sam Hare, Amir Saffari, Philip H. S. Torr
- * International Conference on Computer Vision (ICCV), 2011
- *
- * Copyright (C) 2011 Sam Hare, Oxford Brookes University, Oxford, UK
- *
- * This file is part of Struck.
- *
- * Struck is free software: you can redistribute it and/or modify
- * it under the terms of the GNU General Public License as published by
- * the Free Software Foundation, either version 3 of the License, or
- * (at your option) any later version.
- *
- * Struck is distributed in the hope that it will be useful,
- * but WITHOUT ANY WARRANTY; without even the implied warranty of
- * MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
- * GNU General Public License for more details.
- *
- * You should have received a copy of the GNU General Public License
- * along with Struck. If not, see <http://www.gnu.org/licenses/>.
- *
- */
- #include "Tracker.h"
- #include "Config.h"
- #include <iostream>
- #include <fstream>
- #include <opencv/cv.h>
- #include <opencv/highgui.h>
- #include "vot.hpp"
- using namespace std;
- using namespace cv;
- static const int kLiveBoxWidth = 80;
- static const int kLiveBoxHeight = 80;
- void rectangle(Mat& rMat, const FloatRect& rRect, const Scalar& rColour)
- {
- IntRect r(rRect);
- rectangle(rMat, Point(r.XMin(), r.YMin()), Point(r.XMax(), r.YMax()), rColour);
- }
- int main(int argc, char* argv[])
- {
- // 读取文件对程序参数进行初始化
- string configPath = "config.txt";
- if (argc > 1)
- {
- configPath = argv[1];
- }
- Config conf(configPath); //Config类主要读取config.txt中的参数
- if (conf.features.size() == 0)
- {
- cout << "error: no features specified in config" << endl;
- return EXIT_FAILURE;
- }
- Tracker tracker(conf);
- //Check if --challenge was passed as an argument
- bool challengeMode = false;
- for (int i = 1; i < argc; i++) {
- if (strcmp("--challenge", argv[i]) == 0) { //判断是否有挑战模式(vot挑战)
- challengeMode = true;
- }
- }
- if (challengeMode) { //VOT(Visual object tracking)挑战,它提供了一个公共平台,目标是比较各种跟踪算法再短期跟踪内的性能,讨论视觉跟踪领域的发展。
- //load region, images and prepare for output
- Mat frameOrig;
- Mat frame;
- VOT vot_io("region.txt", "images.txt", "output.txt");
- vot_io.getNextImage(frameOrig);
- resize(frameOrig, frame, Size(conf.frameWidth, conf.frameHeight));
- cv::Rect initPos = vot_io.getInitRectangle();
- vot_io.outputBoundingBox(initPos);
- float scaleW = (float)conf.frameWidth/frameOrig.cols;
- float scaleH = (float)conf.frameHeight/frameOrig.rows;
- FloatRect initBB_vot = FloatRect(initPos.x*scaleW, initPos.y*scaleH, initPos.width*scaleW, initPos.height*scaleH);
- tracker.Initialise(frame, initBB_vot);
- while (vot_io.getNextImage(frameOrig) == 1){
- resize(frameOrig, frame, Size(conf.frameWidth, conf.frameHeight));
- tracker.Track(frame);
- const FloatRect& bb = tracker.GetBB();
- float x = bb.XMin()/scaleW;
- float y = bb.YMin()/scaleH;
- float w = bb.Width()/scaleW;
- float h = bb.Height()/scaleH;
- cv::Rect output = cv::Rect(x,y,w,h);
- vot_io.outputBoundingBox(output);
- }
- return 0;
- }
- ofstream outFile;
- if (conf.resultsPath != "")
- {
- outFile.open(conf.resultsPath.c_str(), ios::out); //将程序写入resultpath
- if (!outFile)
- {
- cout << "error: could not open results file: " << conf.resultsPath << endl;
- return EXIT_FAILURE;
- }
- }
- // if no sequence specified then use the camera
- bool useCamera = (conf.sequenceName == "");
- VideoCapture cap;
- int startFrame = -1;
- int endFrame = -1;
- FloatRect initBB;
- string imgFormat;
- float scaleW = 1.f;
- float scaleH = 1.f;
- if (useCamera)
- {
- if (!cap.open(0))
- {
- cout << "error: could not start camera capture" << endl;
- return EXIT_FAILURE;
- }
- startFrame = 0;
- endFrame = INT_MAX; /* maximum (signed) int value */
- Mat tmp;
- cap >> tmp;
- scaleW = (float)conf.frameWidth/tmp.cols;
- scaleH = (float)conf.frameHeight/tmp.rows;
- initBB = IntRect(conf.frameWidth/2-kLiveBoxWidth/2, conf.frameHeight/2-kLiveBoxHeight/2, kLiveBoxWidth, kLiveBoxHeight);
- cout << "press 'i' to initialise tracker" << endl;
- }
- else
- {
- // parse frames file
- string framesFilePath = conf.sequenceBasePath+"/"+conf.sequenceName+"/"+conf.sequenceName+"_frames.txt"; //girl_frames.txt的文件路径,该文件放在girl文件夹里,内容为0,501。
- ifstream framesFile(framesFilePath.c_str(), ios::in);
- if (!framesFile)
- {
- cout << "error: could not open sequence frames file: " << framesFilePath << endl;
- return EXIT_FAILURE;
- }
- string framesLine;
- getline(framesFile, framesLine);
- sscanf(framesLine.c_str(), "%d,%d", &startFrame, &endFrame); //startFrame=0;endFrame=501;
- if (framesFile.fail() || startFrame == -1 || endFrame == -1)
- {
- cout << "error: could not parse sequence frames file" << endl;
- return EXIT_FAILURE;
- }
- imgFormat = conf.sequenceBasePath+"/"+conf.sequenceName+"/imgs/img%05d.png";
- // read first frame to get size
- char imgPath[256];
- sprintf(imgPath, imgFormat.c_str(), startFrame); //sprintf把格式化的数据写入某个字符串缓冲区(imgPath);
- Mat tmp = cv::imread(imgPath, 0);
- scaleW = (float)conf.frameWidth/tmp.cols; //=1;
- scaleH = (float)conf.frameHeight/tmp.rows; //=1;
- // read init box from ground truth file
- string gtFilePath = conf.sequenceBasePath+"/"+conf.sequenceName+"/"+conf.sequenceName+"_gt.txt"; //读取girl_gt.txt文件
- ifstream gtFile(gtFilePath.c_str(), ios::in);
- if (!gtFile)
- {
- cout << "error: could not open sequence gt file: " << gtFilePath << endl;
- return EXIT_FAILURE;
- }
- string gtLine;
- getline(gtFile, gtLine);
- float xmin = -1.f;
- float ymin = -1.f;
- float width = -1.f;
- float height = -1.f;
- sscanf(gtLine.c_str(), "%f,%f,%f,%f", &xmin, &ymin, &width, &height); //128,46,104,127
- if (gtFile.fail() || xmin < 0.f || ymin < 0.f || width < 0.f || height < 0.f)
- {
- cout << "error: could not parse sequence gt file" << endl;
- return EXIT_FAILURE;
- }
- initBB = FloatRect(xmin*scaleW, ymin*scaleH, width*scaleW, height*scaleH);
- }
- if (!conf.quietMode)
- {
- namedWindow("result");
- }
- Mat result(conf.frameHeight, conf.frameWidth, CV_8UC3);
- bool paused = false;
- bool doInitialise = false;
- srand(conf.seed);
- for (int frameInd = startFrame; frameInd <= endFrame; ++frameInd) //逐帧处理
- {
- Mat frame;
- if (useCamera) //若使用摄像头
- {
- Mat frameOrig;
- cap >> frameOrig;
- resize(frameOrig, frame, Size(conf.frameWidth, conf.frameHeight));
- flip(frame, frame, 1);
- frame.copyTo(result);
- if (doInitialise)
- {
- if (tracker.IsInitialised())
- {
- tracker.Reset();
- }
- else
- {
- tracker.Initialise(frame, initBB);
- }
- doInitialise = false;
- }
- else if (!tracker.IsInitialised())
- {
- rectangle(result, initBB, CV_RGB(255, 255, 255));
- }
- }
- else //若读取图片序列
- {
- char imgPath[256];
- sprintf(imgPath, imgFormat.c_str(), frameInd);
- Mat frameOrig = cv::imread(imgPath, 0);
- if (frameOrig.empty())
- {
- cout << "error: could not read frame: " << imgPath << endl;
- return EXIT_FAILURE;
- }
- resize(frameOrig, frame, Size(conf.frameWidth, conf.frameHeight)); //将读取的每帧图像统一为320*240;
- cvtColor(frame, result, CV_GRAY2RGB);
- if (frameInd == startFrame)
- {
- tracker.Initialise(frame, initBB); //对第一帧进行初始化
- }
- }
- if (tracker.IsInitialised())
- {
- tracker.Track(frame); //开始跟踪
- if (!conf.quietMode && conf.debugMode)
- {
- tracker.Debug(); //用于显示样本图像
- }
- rectangle(result, tracker.GetBB(), CV_RGB(0, 255, 0));
- if (outFile)
- {
- const FloatRect& bb = tracker.GetBB();
- outFile << bb.XMin()/scaleW << "," << bb.YMin()/scaleH << "," << bb.Width()/scaleW << "," << bb.Height()/scaleH << endl;
- } //输出跟踪结果坐标
- }
- if (!conf.quietMode)
- {
- imshow("result", result); //显示跟踪画面
- int key = waitKey(paused ? 0 : 1);
- if (key != -1)
- {
- if (key == 27 || key == 113) // esc q
- {
- break;
- }
- else if (key == 112) // p
- {
- paused = !paused;
- }
- else if (key == 105 && useCamera)
- {
- doInitialise = true;
- }
- }
- if (conf.debugMode && frameInd == endFrame)
- {
- cout << "\n\nend of sequence, press any key to exit" << endl;
- waitKey();
- }
- }
- }
- if (outFile.is_open())
- {
- outFile.close();
- }
- return EXIT_SUCCESS;
- }
Tracker.cpp
- #include "Tracker.h"
- #include "Config.h"
- #include "ImageRep.h"
- #include "Sampler.h"
- #include "Sample.h"
- #include "GraphUtils/GraphUtils.h"
- #include "HaarFeatures.h"
- #include "RawFeatures.h"
- #include "HistogramFeatures.h"
- #include "MultiFeatures.h"
- #include "Kernels.h"
- #include "LaRank.h"
- #include <opencv/cv.h>
- #include <opencv/highgui.h>
- #include <Eigen/Core>
- #include <vector>
- #include <algorithm>
- using namespace cv;
- using namespace std;
- using namespace Eigen;
- Tracker::Tracker(const Config& conf) : //构造函数,对参数进行初始化
- m_config(conf),
- m_initialised(false),
- m_pLearner(0),
- m_debugImage(2*conf.searchRadius+1, 2*conf.searchRadius+1, CV_32FC1),
- m_needsIntegralImage(false)
- {
- Reset();
- }
- Tracker::~Tracker()
- {
- delete m_pLearner;
- for (int i = 0; i < (int)m_features.size(); ++i)
- {
- delete m_features[i];
- delete m_kernels[i];
- }
- }
- void Tracker::Reset() //因为初始化为haar特征核高斯核函数,所以m_needsIntegralImage = true,m_needsIntegralHist = false;
- {
- m_initialised = false;
- m_debugImage.setTo(0);
- if (m_pLearner) delete m_pLearner;
- for (int i = 0; i < (int)m_features.size(); ++i)
- {
- delete m_features[i];
- delete m_kernels[i];
- }
- m_features.clear();
- m_kernels.clear();
- m_needsIntegralImage = false;
- m_needsIntegralHist = false;
- int numFeatures = m_config.features.size();
- vector<int> featureCounts;
- for (int i = 0; i < numFeatures; ++i)
- {
- switch (m_config.features[i].feature)
- {
- case Config::kFeatureTypeHaar:
- m_features.push_back(new HaarFeatures(m_config));
- m_needsIntegralImage = true;
- break;
- case Config::kFeatureTypeRaw:
- m_features.push_back(new RawFeatures(m_config));
- break;
- case Config::kFeatureTypeHistogram:
- m_features.push_back(new HistogramFeatures(m_config));
- m_needsIntegralHist = true;
- break;
- }
- featureCounts.push_back(m_features.back()->GetCount());
- switch (m_config.features[i].kernel)
- {
- case Config::kKernelTypeLinear:
- m_kernels.push_back(new LinearKernel());
- break;
- case Config::kKernelTypeGaussian:
- m_kernels.push_back(new GaussianKernel(m_config.features[i].params[0]));
- break;
- case Config::kKernelTypeIntersection:
- m_kernels.push_back(new IntersectionKernel());
- break;
- case Config::kKernelTypeChi2:
- m_kernels.push_back(new Chi2Kernel());
- break;
- }
- }
- if (numFeatures > 1)
- {
- MultiFeatures* f = new MultiFeatures(m_features);
- m_features.push_back(f);
- MultiKernel* k = new MultiKernel(m_kernels, featureCounts);
- m_kernels.push_back(k);
- }
- m_pLearner = new LaRank(m_config, *m_features.back(), *m_kernels.back());
- }
- void Tracker::Initialise(const cv::Mat& frame, FloatRect bb)
- {
- m_bb = IntRect(bb);//将目标框坐标转为int型
- //该类主要实现了积分图计算
- ImageRep image(frame, m_needsIntegralImage, m_needsIntegralHist); //后两个参数分别为true,false
- for (int i = 0; i < 1; ++i)
- {
- UpdateLearner(image);// 更新预测函数
- }
- m_initialised = true;
- }
- void Tracker::Track(const cv::Mat& frame)
- {
- assert(m_initialised);
- ImageRep image(frame, m_needsIntegralImage, m_needsIntegralHist); //获得当前帧的积分图
- vector<FloatRect> rects = Sampler::PixelSamples(m_bb, m_config.searchRadius); //抽样
- vector<FloatRect> keptRects;
- keptRects.reserve(rects.size());
- for (int i = 0; i < (int)rects.size(); ++i)
- {
- if (!rects[i].IsInside(image.GetRect())) continue;
- keptRects.push_back(rects[i]); //将超出图像范围的框舍弃,剩余的保留在keptRects中
- }
- MultiSample sample(image, keptRects); //多样本类,主要包括样本框以及ImageRep image
- vector<double> scores;
- m_pLearner->Eval(sample, scores); //scores里存放的是论文中公式(10)后半部分
- double bestScore = -DBL_MAX;
- int bestInd = -1;
- for (int i = 0; i < (int)keptRects.size(); ++i)
- {
- if (scores[i] > bestScore)
- {
- bestScore = scores[i];
- bestInd = i; //找到bestScore
- }
- }
- UpdateDebugImage(keptRects, m_bb, scores);//更新debug图像,用于显示
- if (bestInd != -1)
- {
- m_bb = keptRects[bestInd];
- UpdateLearner(image);
- #if VERBOSE
- cout << "track score: " << bestScore << endl;
- #endif
- }
- }
- void Tracker::UpdateDebugImage(const vector<FloatRect>& samples, const FloatRect& centre, const vector<double>& scores)
- {
- double mn = VectorXd::Map(&scores[0], scores.size()).minCoeff(); //Map:将现存的结构映射到Eigen的数据结构里,进行计算
- double mx = VectorXd::Map(&scores[0], scores.size()).maxCoeff(); //R.minCoeff()=min(R(:)), R.maxCoeff()=max(R(:));
- m_debugImage.setTo(0); //置为全黑色
- for (int i = 0; i < (int)samples.size(); ++i)
- {
- int x = (int)(samples[i].XMin() - centre.XMin());
- int y = (int)(samples[i].YMin() - centre.YMin());
- m_debugImage.at<float>(m_config.searchRadius+y,m_config.searchRadius+x)=(float)((scores[i]-mn)/(mx-mn));//scores得分越大的框,会在m_debugImage上具有越大的值,即该点越亮(类似于置信图)
- }
- }
- void Tracker::Debug()
- {
- imshow("tracker", m_debugImage); //显示m_debugImage图像
- m_pLearner->Debug();
- }
- void Tracker::UpdateLearner(const ImageRep& image) //更新预测函数
- {
- // note these return the centre sample at index 0
- vector<FloatRect> rects = Sampler::RadialSamples(m_bb, 2*m_config.searchRadius, 5, 16);//5*16=80,加上一个原始rect,共包含81个rect
- //vector<FloatRect> rects = Sampler::PixelSamples(m_bb, 2*m_config.searchRadius, true);
- vector<FloatRect> keptRects;
- keptRects.push_back(rects[0]); // 原始目标框
- for (int i = 1; i < (int)rects.size(); ++i)
- {
- if (!rects[i].IsInside(image.GetRect())) continue; //判断生成的样本框是否超出图像范围,超出的舍弃
- keptRects.push_back(rects[i]);
- }
- #if VERBOSE
- cout << keptRects.size() << " samples" << endl;
- #endif
- MultiSample sample(image, keptRects); //多样本类对象sample,包含ImageRep& image,以及保留下来样本框
- m_pLearner->Update(sample, 0); //更新,在LaRank类下实现
- }
LaRank.h
- #ifndef LARANK_H
- #define LARANK_H
- #include "Rect.h"
- #include "Sample.h"
- #include <vector>
- #include <Eigen/Core>
- #include <opencv/cv.h>
- class Config;
- class Features;
- class Kernel;
- class LaRank //文献《Solving multiclass support vector machine with LaRank》,该类实现了struck算法的主要步骤
- {
- public:
- LaRank(const Config& conf, const Features& features, const Kernel& kernel); //初始化参数,特征值,核
- ~LaRank();
- virtual void Eval(const MultiSample& x, std::vector<double>& results);
- virtual void Update(const MultiSample& x, int y);
- virtual void Debug();
- private:
- struct SupportPattern
- {
- std::vector<Eigen::VectorXd> x; //特征值
- std::vector<FloatRect> yv; //变化关系
- std::vector<cv::Mat> images; //图像片
- int y; //索引值
- int refCount; //统计sp的个数?
- };
- struct SupportVector
- {
- SupportPattern* x;
- int y;
- double b; //beta
- double g; //gradient
- cv::Mat image;
- };
- const Config& m_config;
- const Features& m_features;
- const Kernel& m_kernel;
- std::vector<SupportPattern*> m_sps;
- std::vector<SupportVector*> m_svs;
- cv::Mat m_debugImage;
- double m_C;
- Eigen::MatrixXd m_K;
- inline double Loss(const FloatRect& y1, const FloatRect& y2) const //损失函数
- {
- // overlap loss
- return 1.0-y1.Overlap(y2);
- // squared distance loss
- //double dx = y1.XMin()-y2.XMin();
- //double dy = y1.YMin()-y2.YMin();
- //return dx*dx+dy*dy;
- }
- double ComputeDual() const;
- void SMOStep(int ipos, int ineg);
- std::pair<int, double> MinGradient(int ind);
- void ProcessNew(int ind);
- void Reprocess();
- void ProcessOld();
- void Optimize();
- int AddSupportVector(SupportPattern* x, int y, double g);
- void RemoveSupportVector(int ind);
- void RemoveSupportVectors(int ind1, int ind2);
- void SwapSupportVectors(int ind1, int ind2);
- void BudgetMaintenance();
- void BudgetMaintenanceRemove();
- double Evaluate(const Eigen::VectorXd& x, const FloatRect& y) const;
- void UpdateDebugImage();
- };
- #endif
LaRank.cpp
- #include "LaRank.h"
- #include "Config.h"
- #include "Features.h"
- #include "Kernels.h"
- #include "Sample.h"
- #include "Rect.h"
- #include "GraphUtils/GraphUtils.h"
- #include <Eigen/Array>
- #include <opencv/highgui.h>
- static const int kTileSize = 30;
- using namespace cv;
- using namespace std;
- using namespace Eigen;
- static const int kMaxSVs = 2000; // TODO (only used when no budget)
- LaRank::LaRank(const Config& conf, const Features& features, const Kernel& kernel) :
- m_config(conf),
- m_features(features),
- m_kernel(kernel),
- m_C(conf.svmC)
- {
- int N = conf.svmBudgetSize > 0 ? conf.svmBudgetSize+2 : kMaxSVs; //N=100+2,特征向量的个数不能超过这个阈值
- m_K = MatrixXd::Zero(N, N); //m_K表示核矩阵,102*102
- m_debugImage = Mat(800, 600, CV_8UC3);
- }
- LaRank::~LaRank()
- {
- }
- double LaRank::Evaluate(const Eigen::VectorXd& x, const FloatRect& y) const //论文中公式10后半部分计算,即F
- {
- double f = 0.0;
- for (int i = 0; i < (int)m_svs.size(); ++i)
- {
- const SupportVector& sv = *m_svs[i];
- f += sv.b*m_kernel.Eval(x, sv.x->x[sv.y]); //beta*高斯核
- }
- return f;
- }
- void LaRank::Eval(const MultiSample& sample, std::vector<double>& results)
- {
- const FloatRect& centre(sample.GetRects()[0]); //原始目标框
- vector<VectorXd> fvs;
- const_cast<Features&>(m_features).Eval(sample, fvs); //fvs存放haar特征值
- results.resize(fvs.size());
- for (int i = 0; i < (int)fvs.size(); ++i)
- {
- // express y in coord frame of centre sample
- FloatRect y(sample.GetRects()[i]);
- y.Translate(-centre.XMin(), -centre.YMin()); //将每个框的横纵坐标分别减去原始目标框的横纵坐标
- results[i] = Evaluate(fvs[i], y); //计算每个框的F函数,结果保存在results中。
- }
- }
- void LaRank::Update(const MultiSample& sample, int y)
- {
- // add new support pattern
- SupportPattern* sp = new SupportPattern; //定义一个sp
- const vector<FloatRect>& rects = sample.GetRects(); //获得所有的样本框
- FloatRect centre = rects[y]; //原始目标框
- for (int i = 0; i < (int)rects.size(); ++i)
- {
- // express r in coord frame of centre sample
- FloatRect r = rects[i];
- r.Translate(-centre.XMin(), -centre.YMin()); //这就表示帧间目标位置变化关系
- sp->yv.push_back(r);
- if (!m_config.quietMode && m_config.debugMode)
- {
- // store a thumbnail for each sample
- Mat im(kTileSize, kTileSize, CV_8UC1);
- IntRect rect = rects[i];
- cv::Rect roi(rect.XMin(), rect.YMin(), rect.Width(), rect.Height()); //感兴趣的区域是那些抽取的样本区域
- cv::resize(sample.GetImage().GetImage(0)(roi), im, im.size()); //0表示通道数,将感兴趣区域统一为30*30,并保存在sp里的images
- sp->images.push_back(im);
- }
- }
- // evaluate features for each sample
- sp->x.resize(rects.size()); //有多少个感兴趣的框,就有多少个特征值向量。
- const_cast<Features&>(m_features).Eval(sample, sp->x); //将每个样本框计算得到的haar特征存入sp->x,这里关于haar特征的代码不再列出,我将代码提取出来单独写出一篇博客《http://blog.csdn.net/qianxin_dh/article/details/39268113》
- sp->y = y;
- sp->refCount = 0;
- m_sps.push_back(sp); //存储sp
- ProcessNew((int)m_sps.size()-1); //执行该步骤,添加支持向量,并对beta值进行调整
- BudgetMaintenance(); //保证支持向量没有超出限定阈值
- for (int i = 0; i < 10; ++i)
- {
- Reprocess(); //包括processold:增加新的sv;optimize:在现有的sv基础上调整beta值
- BudgetMaintenance();
- }
- }
- void LaRank::BudgetMaintenance()
- {
- if (m_config.svmBudgetSize > 0)
- {
- while ((int)m_svs.size() > m_config.svmBudgetSize)
- {
- BudgetMaintenanceRemove(); //支持向量的个数超出阈值后,找到对于F函数影响最小的负sv,并移除。
- }
- }
- }
- void LaRank::Reprocess()
- {
- ProcessOld(); //每个processold步骤伴随着10个optimize步骤。
- for (int i = 0; i < 10; ++i)
- {
- Optimize();
- }
- }
- double LaRank::ComputeDual() const
- {
- double d = 0.0;
- for (int i = 0; i < (int)m_svs.size(); ++i)
- {
- const SupportVector* sv = m_svs[i];
- d -= sv->b*Loss(sv->x->yv[sv->y], sv->x->yv[sv->x->y]);
- for (int j = 0; j < (int)m_svs.size(); ++j)
- {
- d -= 0.5*sv->b*m_svs[j]->b*m_K(i,j);
- }
- }
- return d;
- }
- void LaRank::SMOStep(int ipos, int ineg)
- {
- if (ipos == ineg) return;
- SupportVector* svp = m_svs[ipos]; //定义一个正支持向量
- SupportVector* svn = m_svs[ineg]; //定义一个负支持向量
- assert(svp->x == svn->x);
- SupportPattern* sp = svp->x; //定义一个支持模式sp,将正支持向量的支持模式赋予sp
- #if VERBOSE
- cout << "SMO: gpos:" << svp->g << " gneg:" << svn->g << endl;
- #endif
- if ((svp->g - svn->g) < 1e-5)
- {
- #if VERBOSE
- cout << "SMO: skipping" << endl;
- #endif
- }
- else
- { //论文中的Algorithm步骤
- double kii = m_K(ipos, ipos) + m_K(ineg, ineg) - 2*m_K(ipos, ineg);
- double lu = (svp->g-svn->g)/kii;
- // no need to clamp against 0 since we'd have skipped in that case
- double l = min(lu, m_C*(int)(svp->y == sp->y) - svp->b);
- svp->b += l;
- svn->b -= l;
- // update gradients
- for (int i = 0; i < (int)m_svs.size(); ++i)
- {
- SupportVector* svi = m_svs[i];
- svi->g -= l*(m_K(i, ipos) - m_K(i, ineg));
- }
- #if VERBOSE
- cout << "SMO: " << ipos << "," << ineg << " -- " << svp->b << "," << svn->b << " (" << l << ")" << endl;
- #endif
- }
- // check if we should remove either sv now
- if (fabs(svp->b) < 1e-8) //beta为0,该向量被移除
- {
- RemoveSupportVector(ipos);
- if (ineg == (int)m_svs.size())
- {
- // ineg and ipos will have been swapped during sv removal
- ineg = ipos;
- }
- }
- if (fabs(svn->b) < 1e-8) //beta=0,该向量被移除
- {
- RemoveSupportVector(ineg);
- }
- }
- pair<int, double> LaRank::MinGradient(int ind)
- {
- const SupportPattern* sp = m_sps[ind];
- pair<int, double> minGrad(-1, DBL_MAX);
- for (int i = 0; i < (int)sp->yv.size(); ++i)
- {
- double grad = -Loss(sp->yv[i], sp->yv[sp->y]) - Evaluate(sp->x[i], sp->yv[i]);//通过公式10找到最小梯度对应的样本框
- if (grad < minGrad.second)
- {
- minGrad.first = i;
- minGrad.second = grad;
- }
- }
- return minGrad;
- }
- void LaRank::ProcessNew(int ind) //可以添加新的支持向量,增加的正负支持向量(sv)具有相同的支持模式(sp)
- {
- // gradient is -f(x,y) since loss=0
- int ip = AddSupportVector(m_sps[ind], m_sps[ind]->y, -Evaluate(m_sps[ind]->x[m_sps[ind]->y],m_sps[ind]->yv[m_sps[ind]->y])); //处理当前新样本,将上一帧目标位置作为正向量加入
- pair<int, double> minGrad = MinGradient(ind); //int,double分别是具有最小梯度的样本框存放的位置,最小梯度的数值
- int in = AddSupportVector(m_sps[ind], minGrad.first, minGrad.second); //将当前具有最小梯度的样本作为负向量加入
- SMOStep(ip, in); //Algorithm 1,更新beta和gradient值
- }
- void LaRank::ProcessOld() //可以添加新的支持向量
- {
- if (m_sps.size() == 0) return;
- // choose pattern to process
- int ind = rand() % m_sps.size(); //随机选取sp
- // find existing sv with largest grad and nonzero beta
- int ip = -1;
- double maxGrad = -DBL_MAX;
- for (int i = 0; i < (int)m_svs.size(); ++i)
- {
- if (m_svs[i]->x != m_sps[ind]) continue;
- const SupportVector* svi = m_svs[i];
- if (svi->g > maxGrad && svi->b < m_C*(int)(svi->y == m_sps[ind]->y)) //找出符合该条件的,作为y+,后一个条件保证了y+是从现存的sv中找出,因此不会增加新的向量
- {
- ip = i;
- maxGrad = svi->g;
- }
- }
- assert(ip != -1);
- if (ip == -1) return;
- // find potentially new sv with smallest grad
- pair<int, double> minGrad = MinGradient(ind);
- int in = -1;
- for (int i = 0; i < (int)m_svs.size(); ++i)
- {
- if (m_svs[i]->x != m_sps[ind]) continue; //找出满足该条件的,作为y-
- if (m_svs[i]->y == minGrad.first)
- {
- in = i;
- break;
- }
- }
- if (in == -1)
- {
- // add new sv
- in = AddSupportVector(m_sps[ind], minGrad.first, minGrad.second); //将该样本作为负sv加入
- }
- SMOStep(ip, in); //更新beta和gradient的值
- }
- void LaRank::Optimize() //
- {
- if (m_sps.size() == 0) return;
- // choose pattern to optimize
- int ind = rand() % m_sps.size(); //随机处理现存的sp
- int ip = -1;
- int in = -1;
- double maxGrad = -DBL_MAX;
- double minGrad = DBL_MAX;
- for (int i = 0; i < (int)m_svs.size(); ++i)
- {
- if (m_svs[i]->x != m_sps[ind]) continue;
- const SupportVector* svi = m_svs[i];
- if(svi->g>maxGrad&&svi->b<m_C*(int)(svi->y==m_sps->[y])) //将满足该条件的作为y+
- {
- ip = i;
- maxGrad = svi->g;
- }
- if (svi->g < minGrad) //将满足该条件的作为y-
- {
- in = i;
- minGrad = svi->g;
- }
- }
- assert(ip != -1 && in != -1);
- if (ip == -1 || in == -1)
- {
- // this shouldn't happen
- cout << "!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!" << endl;
- return;
- }
- SMOStep(ip, in); //更新beta和gradient
- }
- int LaRank::AddSupportVector(SupportPattern* x, int y, double g)
- {
- SupportVector* sv = new SupportVector;
- sv->b = 0.0; //beta初始化为0
- sv->x = x;
- sv->y = y;
- sv->g = g;
- int ind = (int)m_svs.size();
- m_svs.push_back(sv);
- x->refCount++;
- #if VERBOSE
- cout << "Adding SV: " << ind << endl;
- #endif
- // update kernel matrix
- for (int i = 0; i < ind; ++i) //计算核矩阵
- {
- m_K(i,ind) = m_kernel.Eval(m_svs[i]->x->x[m_svs[i]->y], x->x[y]);
- m_K(ind,i) = m_K(i,ind);
- }
- m_K(ind,ind) = m_kernel.Eval(x->x[y]);
- return ind;
- }
- void LaRank::SwapSupportVectors(int ind1, int ind2)
- {
- SupportVector* tmp = m_svs[ind1];
- m_svs[ind1] = m_svs[ind2];
- m_svs[ind2] = tmp;
- VectorXd row1 = m_K.row(ind1);
- m_K.row(ind1) = m_K.row(ind2);
- m_K.row(ind2) = row1;
- VectorXd col1 = m_K.col(ind1);
- m_K.col(ind1) = m_K.col(ind2);
- m_K.col(ind2) = col1;
- }
- void LaRank::RemoveSupportVector(int ind)
- {
- #if VERBOSE
- cout << "Removing SV: " << ind << endl;
- #endif
- m_svs[ind]->x->refCount--;
- if (m_svs[ind]->x->refCount == 0)
- {
- // also remove the support pattern
- for (int i = 0; i < (int)m_sps.size(); ++i)
- {
- if (m_sps[i] == m_svs[ind]->x)
- {
- delete m_sps[i];
- m_sps.erase(m_sps.begin()+i);
- break;
- }
- }
- }
- // make sure the support vector is at the back, this
- // lets us keep the kernel matrix cached and valid
- if (ind < (int)m_svs.size()-1)
- {
- SwapSupportVectors(ind, (int)m_svs.size()-1);
- ind = (int)m_svs.size()-1;
- }
- delete m_svs[ind];
- m_svs.pop_back();
- }
- void LaRank::BudgetMaintenanceRemove()
- {
- // find negative sv with smallest effect on discriminant function if removed
- double minVal = DBL_MAX;
- int in = -1;
- int ip = -1;
- for (int i = 0; i < (int)m_svs.size(); ++i)
- {
- if (m_svs[i]->b < 0.0) //找到负sv
- {
- // find corresponding positive sv
- int j = -1;
- for (int k = 0; k < (int)m_svs.size(); ++k)
- {
- if (m_svs[k]->b > 0.0 && m_svs[k]->x == m_svs[i]->x) //找到同一支持模式下的正sv
- {
- j = k;
- break;
- }
- }
- double val = m_svs[i]->b*m_svs[i]->b*(m_K(i,i) + m_K(j,j) - 2.0*m_K(i,j));
- if (val < minVal) //找到对F影响最小的sv
- {
- minVal = val;
- in = i;
- ip = j;
- }
- }
- }
- // adjust weight of positive sv to compensate for removal of negative
- m_svs[ip]->b += m_svs[in]->b; //将负sv移除,其相应的beta值需补偿到正sv上。
- // remove negative sv
- RemoveSupportVector(in);
- if (ip == (int)m_svs.size())
- {
- // ip and in will have been swapped during support vector removal
- ip = in;
- }
- if (m_svs[ip]->b < 1e-8) //beta值为0,移除该向量
- {
- // also remove positive sv
- RemoveSupportVector(ip);
- }
- // update gradients
- // TODO: this could be made cheaper by just adjusting incrementally rather than recomputing
- for (int i = 0; i < (int)m_svs.size(); ++i)
- {
- SupportVector& svi = *m_svs[i];
- svi.g = -Loss(svi.x->yv[svi.y],svi.x->yv[svi.x->y]) - Evaluate(svi.x->x[svi.y], svi.x->yv[svi.y]);
- }
- }
- void LaRank::Debug()
- {
- cout << m_sps.size() << "/" << m_svs.size() << " support patterns/vectors" << endl;
- UpdateDebugImage();
- imshow("learner", m_debugImage);
- }
- void LaRank::UpdateDebugImage() //该函数主要用于样本显示,与算法关系不大,这里不做分析了
- {
- m_debugImage.setTo(0);
- int n = (int)m_svs.size();
- if (n == 0) return;
- const int kCanvasSize = 600;
- int gridSize = (int)sqrtf((float)(n-1)) + 1;
- int tileSize = (int)((float)kCanvasSize/gridSize);
- if (tileSize < 5)
- {
- cout << "too many support vectors to display" << endl;
- return;
- }
- Mat temp(tileSize, tileSize, CV_8UC1);
- int x = 0;
- int y = 0;
- int ind = 0;
- float vals[kMaxSVs];
- memset(vals, 0, sizeof(float)*n);
- int drawOrder[kMaxSVs];
- for (int set = 0; set < 2; ++set)
- {
- for (int i = 0; i < n; ++i)
- {
- if (((set == 0) ? 1 : -1)*m_svs[i]->b < 0.0) continue;
- drawOrder[ind] = i;
- vals[ind] = (float)m_svs[i]->b;
- ++ind;
- Mat I = m_debugImage(cv::Rect(x, y, tileSize, tileSize));
- resize(m_svs[i]->x->images[m_svs[i]->y], temp, temp.size());
- cvtColor(temp, I, CV_GRAY2RGB);
- double w = 1.0;
- rectangle(I, Point(0, 0), Point(tileSize-1, tileSize-1), (m_svs[i]->b > 0.0) ? CV_RGB(0, (uchar)(255*w), 0) : CV_RGB((uchar)(255*w), 0, 0), 3);
- x += tileSize;
- if ((x+tileSize) > kCanvasSize)
- {
- y += tileSize;
- x = 0;
- }
- }
- }
- const int kKernelPixelSize = 2;
- int kernelSize = kKernelPixelSize*n;
- double kmin = m_K.minCoeff();
- double kmax = m_K.maxCoeff();
- if (kernelSize < m_debugImage.cols && kernelSize < m_debugImage.rows)
- {
- Mat K = m_debugImage(cv::Rect(m_debugImage.cols-kernelSize, m_debugImage.rows-kernelSize, kernelSize, kernelSize));
- for (int i = 0; i < n; ++i)
- {
- for (int j = 0; j < n; ++j)
- {
- Mat Kij = K(cv::Rect(j*kKernelPixelSize, i*kKernelPixelSize, kKernelPixelSize, kKernelPixelSize));
- uchar v = (uchar)(255*(m_K(drawOrder[i], drawOrder[j])-kmin)/(kmax-kmin));
- Kij.setTo(Scalar(v, v, v));
- }
- }
- }
- else
- {
- kernelSize = 0;
- }
- Mat I = m_debugImage(cv::Rect(0, m_debugImage.rows - 200, m_debugImage.cols-kernelSize, 200));
- I.setTo(Scalar(255,255,255));
- IplImage II = I;
- setGraphColor(0);
- drawFloatGraph(vals, n, &II, 0.f, 0.f, I.cols, I.rows);
- }















 2818
2818

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









