







文章目录
Debug system registers
在ARMv7架构中,调试功能通过一系列的系统控制块(System Control Block, SCB)寄存器来提供。这些寄存器不仅帮助开发者诊断程序运行中的错误,还提供了硬件故障的详细信息。以下是SCB中与调试相关的重要寄存器和标志位的介绍:
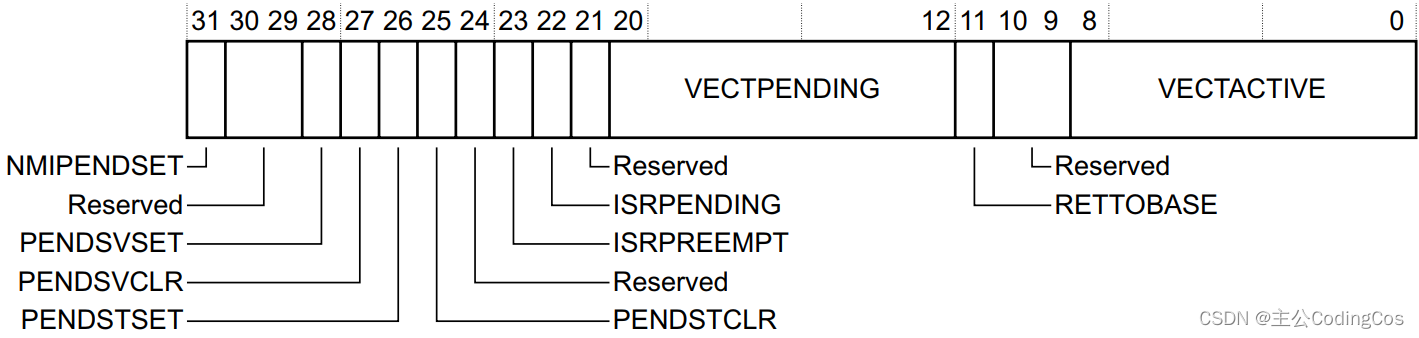
中断控制状态寄存器(ICSR)
ICSR 寄存器可在应用程序中用于:
- 设置和清除系统异常的挂起状态,其中包括 SysTick、PendSV 和 NMI。
- 通过读取 VECTACTIVE 可以确定当前执行的异常/中断编号。
另外,调试器还可利用该寄存器确定中断状态。VECTACTIVE 域和 IPSR 相同。
- 中断控制和状态寄存器(SCB->ICSR,0xE000ED04)
debug 寄存器小结:

Debug Halting Control and Status Register, DHCSR

-
C_DEBUGEN: Enables debug.
启用调试。这只能由 AHB-AP 修改,而不是由软件修改。它在软件进行写入时将被忽略,软件不能设置或清除它。当写入 C_HALT 来暂停CPU时,内核必须向它写入 1。当外部debugger将该bit配置从0修改为1时 必须同时将 域C_MASKINTS(bit[3])置0。 -
C_Halt:Halts the core.
暂停 cpu。当CPU停止时,该位自动设置。例如断点。此位在CPU reset 时清除。该位只能在C_DEBUGEN为 1 时写入,否则将被忽略。- 当设置该位为 1 时,且 C_DEBUGEN 置位时,将会将cpu halt住;
- 当CPU 处于 debug state时,将该bit写0,将会退出 debug state。
-
C_STEP, bit[2]:单步调试使能bit。 -
C_MASKINTS, bit[3]:当debug 模式使能后,也即C_DEBUGEN配置为1后,外部 debugger 可以通过配置该bit来屏蔽ysTick 和 外部其它中断。 -
C_SNAPSTALL, bit[5]:设置此位为1允许调试器请求不精确地进入调试状态。C_SNAPSTALL提供了一种机制,通过它调试器可以请求处理器进入调试状态,而不需要等待具体的断点触发。这对于那些需要在特定条件下暂停处理器执行,但又不依赖于精确断点位置的调试场景特别有用。
当处理器执行加载(load)或存储(store)指令时,可能会遇到“阻塞”(stalled)的情况。这种情况通常发生于数据无法立即从内存中被访问时,例如因为缓存未命中(cache miss)、访问外设或者内存争用等原因。阻塞的加载或存储指令需要等待相关数据可用后才能完成其操作。下面详细介绍这一过程及其影响。可以通过配置C_SNAPSTALL 让 阻塞的 load 或者store强制结束。
-
S_REGRDY:
调试内核寄存器选择器寄存器上的寄存器读/写可用。 为1表示最后一次传输完成。 -
S_HALT
当 S_HALT 为高时,表示处于调试状态 -
S_SLEEP
表示内核正在休眠.WFI、WFE 或 SLEEP-ON-EXIT, 必须使用 C_HALT 来获得控制权或等待中断唤醒。 -
S_LOCKUP:
如果内核正在运行(未停止)并且存在锁定条件,则读取为 1。 -
S_RETIRE_ST: I表示自上次读取后指令已完成。 这是一个在读取时清除的粘性位。 这确定核心是否在加载/存储或获取时停止。 -
S_RESET_ST
表示自从上次读取该位以来,内核已被复位或正在被复位。 这是一个在读取时清除的粘性位。 因此,读取两次并得到 1 然后 0 意味着它在过去被重置。 读取两次并获得 1 意味着它现在正在重置(仍然保持在重置状态)。
Debug 寄存器DCRSR与DCRDR
与调试功能有关的,还有NVIC中另外两个寄存器。它们分别是:调试内核寄存器选择者寄存器(DCRSR),以及调试内核寄存器数据寄存器(DCRDR)。调试器需要通过这两个寄存器来访问处理器的寄存器,并且只有在处理器停机时,才能使用这里的寄存器传送功能。
DCRSR:

DCRDR:

CPU 寄存器读操作
使用DCRSR和DCRDR这两个寄存器来读取内核的寄存器的内容,则必须按如下的顺序做:
- 确定处理器已停机
- 往
DCRSR写数据来选择读CPU的哪个寄存器,其中bit[16]要为0,表示这是要读数据 - 查询,直到
DHCSR.S_REGRDY=1 - 读取
DCRDR以获取寄存器的内容
CPU 寄存器写操作
寄存器写操作的顺序与上面的类似:
- 确定处理器已停机
- 往
DCRDR中写数据 - 往
DCRSR写数据来选择准备写CPU的哪个寄存器,其中bit[16]要为1,表示这是要写数据 - 查询,直到
DHCSR.S_REGRDY=1
NOTE: 使用DCRSR和DCRDR来访问寄存器,只适用于停机模式。
CPU 寄存器选择
DCRSR bit[16] 用标志是读操作还是写操作:
0Read1Write
DCRSR bits[6:0] 用于选择要操作哪个寄存器:
0b0000000-0b0001100:选择寄存器R0-R120b0001101:选择寄存器 SP0b0001110:选择寄存器 LR0b0001111:DebugReturnAddress0b0010000:xPSR0b0010001:Main stack pointer, MSP0b0010010Process stack pointer, PSP.0b0010100Bits[31:24] CONTROL.- Bits[23:16] FAULTMASK.
- Bits[15:8] BASEPRI.
- Bits[7:0] PRIMASK.
0b0100001:Floating-point Status and Control Register, FPSCR.
CPU 寄存器读写示例
写操作:
#define REGW_FLAG BIT(16)
#define S_REGRDY BIT(16)
int cpu_reg_write(uint32_t reg, uint32_t val)
{
uint32_t data, try = 5;
mcu_write(DCRDR, val);
mcu_write(DCRSR, REGW_FLGA | reg);
mcu_read(DHCSR, &data);
while ((data & S_REGRDY) == 0x0 && try) {
log_warn("wait for transfer complete\n");
try--;
}
if (!try) {
log_err("write gpu mcu reg failed\n");
return -1;
}
return 0;
}
读操作:
uint32_t cpu_reg_read(uint32_t reg, uint32_t *pdata)
{
uint32_t data, try = 5;
mcu_write(DCRSR, reg);
mcu_read(DHCSR, &data);
while ((data & S_REGRDY) == 0x0 && try) {
log_warn("wait for transfer complete\n");
try--;
}
if (!try) {
log_err("write gpu mcu reg failed\n");
return -1;
}
mcu_read(DCRDR, pdata);
return 0;
}
调试故障状态寄存器(DFSR)
DFSR(Debug Fault Status Register)是SCB的一部分,提供了与调试相关的故障信息。它指示了最后一次调试事件的原因,例如硬件断点触发或访问违例。DFSR寄存器包括以下几个关键字段:

- HALTED:当处理器因调试请求而停止时,该位被设置。 C_HALT 和 C_STEP 请求都会触发该位置位。
- BKPT:当执行到PFB中硬件断点时或者软件断点指令BKPT指令时,该位被设置。
- DWTTRAP:当数据观察点和追踪(Data Watchpoint and Trace, DWT)单元检测到匹配事件时,该位被设置。
- VCATCH:当向量捕捉事件发生时,该位被设置。
- EXTERNAL:当由于外部调试请求而停止时,该位被设置。
DFSR为开发者提供了关于程序为何停止的直接线索,是调试过程中不可或缺的资源。
















 7966
7966











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











