




1.XL9555介绍
XL9555 是一款 24 引脚的 CMOS 器件,支持 IIC 总线或 SMBus 接口进行驱动。XL9555 器
件是一个 16 位通用并行输入/输出(GPIO)扩展器,可用其 GPIO 连接按键、LED、传感器等,解
决需要额外的 I/O 的需求。
XL9555有如下特性:
⚫ IIC 总线至 16 位 GPIO 扩展器
⚫ 工作电源电压范围为 2.3 V 至 5.5 V
⚫ 低待机电流消耗
⚫ 5 V 容错 I/O 端口
⚫ 400 kHz 快速模式 IIC 总线时钟频率
⚫ SCL/SDA 输入上的噪声滤波器
⚫ 内部通电复位
⚫ 器件地址由 3 个硬件地址引脚决定,最多可在总线上挂载 8 个器件
⚫ 中断脚为开漏输出模式(低电平有效)
⚫ 16 个 I/O 引脚,默认为 16 个输入
XL引脚图如下:
void i2c_init_num0(void)
{
i2c_config_t i2c_config_struct = {0};
uint8_t init_flag = 0;
i2c_config_struct.mode = I2C_MODE_MASTER; //配置I2C模式为master
i2c_config_struct.sda_io_num = IIC0_SDA_GPIO_PIN; //配置I2C的SDA引脚号
i2c_config_struct.scl_io_num = IIC0_SCL_GPIO_PIN; //配置I2C的SCL引脚号
i2c_config_struct.sda_pullup_en = GPIO_PULLUP_ENABLE; //配置SDA引脚上拉使能
i2c_config_struct.scl_pullup_en = GPIO_PULLUP_ENABLE; //配置SCL引脚上拉使能
i2c_config_struct.master.clk_speed = IIC_FREQ; //设置I2C通信速率
i2c_param_config(I2C_NUM_0, &i2c_config_struct); //设置I2C初始化参数
init_flag = i2c_driver_install(I2C_NUM_0, //端口号
i2c_config_struct.mode, //主机模式
I2C_MASTER_RX_BUF_DISABLE, //从机模式下接收缓存大小(主机模式下不使用)
I2C_MASTER_TX_BUF_DISABLE, //从机模式下发送缓存大小(主机模式下不使用)
0); //用于分配中断的标志(通常从机模式使用)
if(init_flag != ESP_OK)
{
while (1)
{
printf("%s,ret: %d",__func__, init_flag);
vTaskDelay(1000);
}
}
}
XL9555 上电进行复位,16 个 I/O 口默认为输入模式,当输入模式的 IO 口状态发生变化时,即发生从高电平变低电平或者从 低电平变高电平,中断脚会拉低。当中断有效后,必须对 XL9555 进行一次读取/写入操作,复位中断,才可以输出下一次中断,否则中断将一直保持。
2.xl9555寄存器介绍
1.XL9555寻址
XL9555器件地址是7位,如下图
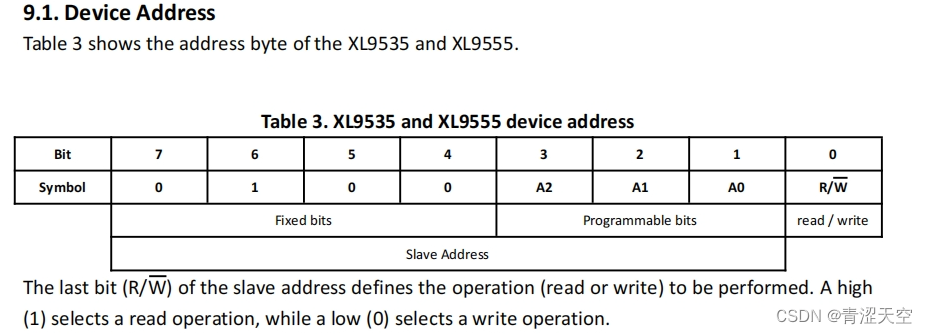
Fixed bits:代表固定的位为"0100",
Programmable bits:可编程的位 "A2 A1 A0”,在硬件上,若把这三个引脚都接地处理,则这三位为“000”。最终得到XL9555器件地址为“0100000”7位。若读操作为0x41;写操作为0x40。
2.XL9555寄存器
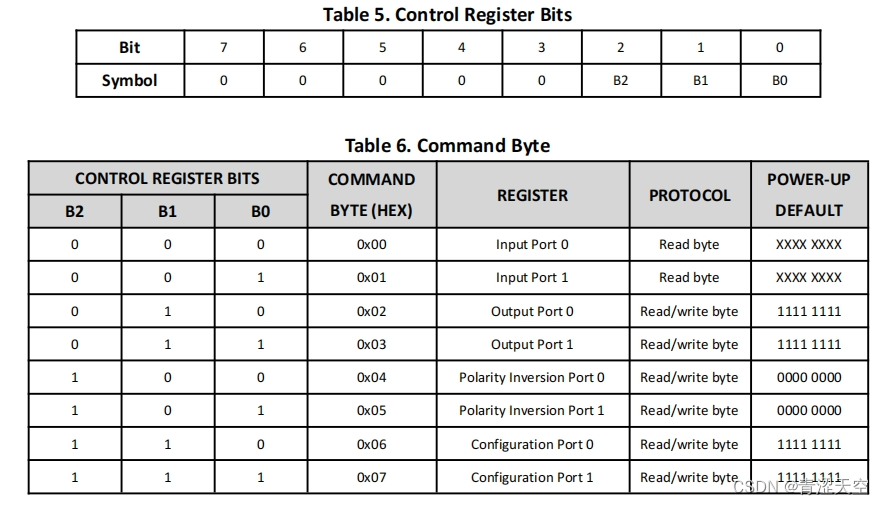
因XL9555只有8个寄存器是对16个GPIO进行配置的,所以控制寄存器只有低三位有效如图Table5
主要分为四种:
输入查询: Input Port 0 (0x00) Input Port 1 (0x01)
输出设置: Output Port 0(0x02) Output Port 1(0x03)
极性翻转: Polarity Inversion Port 0(0x04) Polarity Inversion Port 1(0x05)
端口配置:Configuration Port 0(0x06) Configuration Port 1(0x07)
3.软件配置
1.初始化配置ESP32S3模组的I2C外设和XL9555初始化。代码如下
void i2c_init_num0(void)
{
i2c_config_t i2c_config_struct = {0};
uint8_t init_flag = 0;
i2c_config_struct.mode = I2C_MODE_MASTER; //配置I2C模式为master
i2c_config_struct.sda_io_num = IIC0_SDA_GPIO_PIN; //配置I2C的SDA引脚号
i2c_config_struct.scl_io_num = IIC0_SCL_GPIO_PIN; //配置I2C的SCL引脚号
i2c_config_struct.sda_pullup_en = GPIO_PULLUP_ENABLE; //配置SDA引脚上拉使能
i2c_config_struct.scl_pullup_en = GPIO_PULLUP_ENABLE; //配置SCL引脚上拉使能
i2c_config_struct.master.clk_speed = IIC_FREQ; //设置I2C通信速率
i2c_param_config(I2C_NUM_0, &i2c_config_struct); //设置I2C初始化参数
init_flag = i2c_driver_install(I2C_NUM_0, //端口号
i2c_config_struct.mode, //主机模式
I2C_MASTER_RX_BUF_DISABLE, //从机模式下接收缓存大小(主机模式下不使用)
I2C_MASTER_TX_BUF_DISABLE, //从机模式下发送缓存大小(主机模式下不使用)
0); //用于分配中断的标志(通常从机模式使用)
if(init_flag != ESP_OK)
{
while (1)
{
printf("%s,ret: %d",__func__, init_flag);
vTaskDelay(1000);
}
}
}
void xl9555_init(void)
{
gpio_config_t gpio_init_struct = {0};
uint16_t reg_data;
i2c_init_num0(); //初始化i2c_num_0
gpio_init_struct.intr_type = GPIO_INTR_DISABLE;
gpio_init_struct.mode = GPIO_MODE_INPUT;
gpio_init_struct.pin_bit_mask = (1ull << XL9555_INT_IO);
gpio_init_struct.pull_down_en = GPIO_PULLDOWN_DISABLE;
gpio_init_struct.pull_up_en = GPIO_PULLUP_ENABLE;
gpio_config(&gpio_init_struct); /* 配置XL_INT引脚 */
xl9555_read_Input_Value(®_data, XL9555_GPIO_Port0 | XL9555_GPIO_Port1); //读一次所有的GPIO口,清除中断
// printf("xl9555_init InputReg_data:%d\n",reg_data);
xl9555_ioconfig(0xF003); //配置相应引脚的IO模式(输入(0)、输出(1))
}
3.XL9555读写时序
1.写寄存器时序
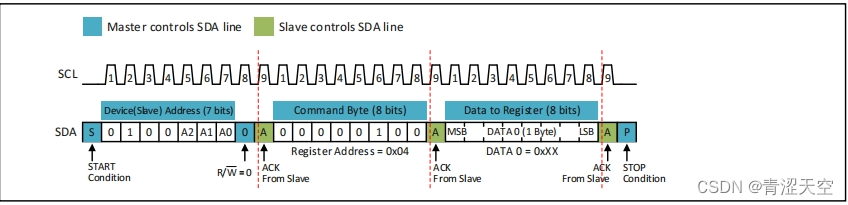
上图中是主机将单字节写入到寄存器的时序,主机在 IIC总线发送第 1个字节的数据
为 XL9555 的写操作地址 0x40(设备地址 0x20 << 1 | 0),用于寻找总线上找到 XL9555,在获得 XL9555 的应答信号之后,继续发送第 2 个字节数据,该字节数据是 XL9555 的寄存器地址,再
等到 XL9555 的应答信号,主机继续发送第 3 字节数据,这里的数据即是写入在第 2 字节寄存器
地址的数据。主机完成写操作后,可以发出停止信号,终止数据传输。
代码实现如下图
/**
* @brief 设置XL9555的16位IO值
* @param data:控制IO的变量
* @param GPIO_Port: 要控制IO所属的端口
* @retval ESP_OK:读取成功;其他:读取失败
*/
esp_err_t xl9555_write_Output_Value (uint16_t data, uint8_t GPIO_Port)
{
esp_err_t ret = ESP_FAIL;
uint8_t tmp[2] = {0};
if((GPIO_Port & XL9555_GPIO_Port0) == 0x1)
{
tmp[0] = XL9555_OUTPUT_PORT0_REG;
tmp[1] = (uint8_t)(data & 0x00FF);
ret = i2c_num0_write_byte(XL9555_ADDR, tmp, 2);
}
if((GPIO_Port & XL9555_GPIO_Port1) == 0x2)
{
tmp[0] = XL9555_OUTPUT_PORT1_REG;
tmp[1] = (uint8_t)((data & 0xFF00) >> 8);
ret = i2c_num0_write_byte(XL9555_ADDR, tmp, 2);
}
return ret;
}
esp_err_t i2c_num0_write_byte(uint8_t addr, uint8_t *byte, uint16_t len)
{
esp_err_t ret = ESP_FAIL;
i2c_cmd_handle_t cmd = i2c_cmd_link_create(); //用于创建一个I2C命令链接,在发送或接收I2C数据时,需要先建立一个命令链,然后添加相应的命令
i2c_master_start(cmd); //向I2C命令链中添加开始信号
i2c_master_write_byte(cmd, (addr << 1)|I2C_FLAG_WRITE, ACK_CHECK_EN); //向命令链中添加一个写设备地址和写命令的字节。
i2c_master_write(cmd, byte, len, ACK_CHECK_EN); //向命令链中添加写设备寄存器与寄存器数据命令的字节
i2c_master_stop(cmd); //向命令链中添加停止信号命令
ret = i2c_master_cmd_begin(I2C_NUM_0, cmd, 100 * (1+len)/portTICK_PERIOD_MS); //开始发送命令
i2c_cmd_link_delete(cmd); //释放命令链接存储空间
return ret;
}
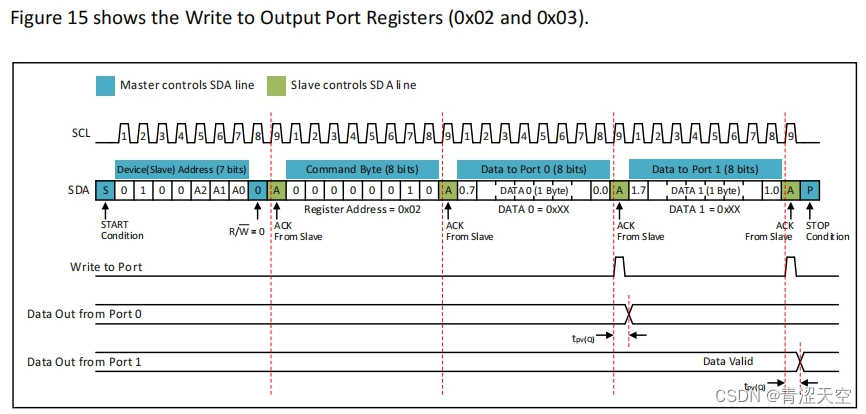
在《XL9555 数据手册》P16 中,还提供有对寄存器组写时序图,如下图
2.读寄存器时序
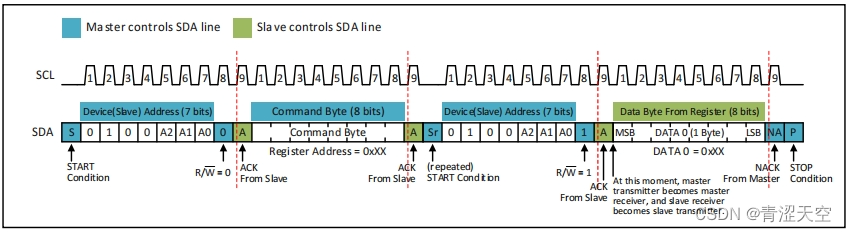
上图是主机从寄存器中读取一个字节数据的时序图。
XL9555 读取数据的过程是一 个复合的时序,其中包含写时序和读时序。
1.先产生起始信号,master发送XL9555的写操作地址 0x40(设备地址 0x20<< 1 | 0),等待获取Slave应答信号。
2.发送需要读取的寄存器地址,获取Slave应答信号后。Master发送起始信号,在发XL9555 的读操作地址 0x41(设备地址 0x20 << 1 | 1),等待获取Slave应答信号。
3.Master接收Slave的寄存器数据后发送非应答信号,在发送一个停止信号。结束通信。
代码实现如下图:
/**
* @brief 读取XL9555的16位IO值
* @param data:读取数据的存储区
* @retval ESP_OK:读取成功;其他:读取失败
*/
esp_err_t xl9555_read_Input_Value (uint16_t *data, uint8_t GPIO_Port)
{
esp_err_t ret = ESP_FAIL;
uint8_t tmp;
if((GPIO_Port & XL9555_GPIO_Port0) == 0x1)
{
ret = i2c_num0_read_byte(XL9555_ADDR, XL9555_INPUT_PORT0_REG, &tmp);
*data = tmp;
}
if((GPIO_Port & XL9555_GPIO_Port1) == 0x2)
{
ret = i2c_num0_read_byte(XL9555_ADDR, XL9555_INPUT_PORT1_REG, &tmp);
*data |= ((((uint16_t)tmp) << 8)& 0xFF00);
}
return ret;
}
esp_err_t i2c_num0_read_byte(uint8_t dev_addr, uint8_t reg_addr, uint8_t *data)
{
esp_err_t ret = ESP_FAIL;
i2c_cmd_handle_t cmd = i2c_cmd_link_create(); //用于创建一个I2C命令链接,在发送或接收I2C数据时,需要先建立一个命令链,然后添加相应的命令
i2c_master_start(cmd); //向I2C命令链中添加开始信号
i2c_master_write_byte(cmd, (dev_addr << 1)|I2C_FLAG_WRITE, ACK_CHECK_EN); //向命令链中添加一个写设备地址和写命令的字节。
i2c_master_write_byte(cmd, reg_addr, ACK_CHECK_EN); //向命令链中添加写设备寄存器地址命令字符。
i2c_master_start(cmd); //向命令链发送起始信号
i2c_master_write_byte(cmd, (dev_addr << 1)|I2C_FLAG_READ, ACK_CHECK_EN); //向命令链发送设备地址和读命令的字符
i2c_master_read_byte(cmd, data, I2C_MASTER_LAST_NACK); //读取从机数据
i2c_master_stop(cmd); //发送停止信号
ret = i2c_master_cmd_begin(I2C_NUM_0, cmd, 400/portTICK_PERIOD_MS); //开始发送命令
i2c_cmd_link_delete(cmd); //释放命令链接存储空间
return ret;
}
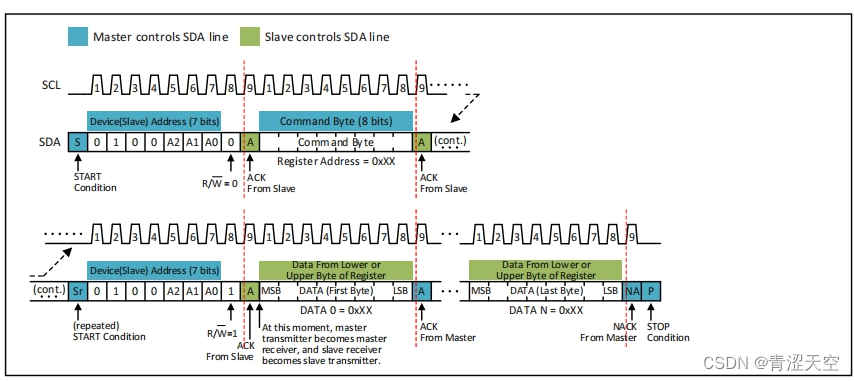
《XL9555 数据手册》 中支持从多个寄存器中读取多个字节的时序,如下图


















 1449
1449

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











