







在科幻电影《超能陆战队》中,我们见证了一种由成千上万个微小磁性单元组成的机器人通过磁力相互连接,形成各种复杂的三维结构。香港中文大学(深圳)林天麟教授团队致力于将这一科幻转化为现实,近年来开发了一系列自由形态模块化自重构机器人。
近日, 林天麟教授团队进一步将研究扩展到模块化自重构机器人在户外非结构化环境中的实际应用。他们的最新研究成果 “Snail-inspired robotic swarms: a hybrid connector drives collective adaptation in unstructured outdoor environments” 于今年4月发表在《自然通讯》(Nature Communications)杂志上。
▍自然启发的蜗牛机器人集群
机器人集群的设计常常受到自然界中群体行为的启发,例如鱼群、蚂蚁群和鸟群的协同行动。这些生物能通过团队合作完成复杂的任务,这种现象被称为“群体智能”。群体智能使得这些生物能在多变的环境中展现出卓越的适应性、稳定性和高效率。借鉴自然界的这些原理,科学家们试图开发能在空中、水中和陆地上活动的机器人集群,模仿这些自然界的群体行为。然而,多数地面可重构机器人集群仍主要在相对简单的室内环境中运行,它们在真实世界的应用仍然面临限制。
在这种背景下,研究人员提出了一种创新的解决方案,实现了模块化自重构机器人在户外非结构化环境的应用,其设计灵感来源于陆地蜗牛的形态和其独特的连接机制。这种新型机器人系统不仅能适应复杂的户外环境,还具备极为稳固的连接机制,确保机器人在组合时能保持极高的稳定性。这项研究为地面机器人集群在非结构化环境中的应用提供了新的可能性,推动了这项技术在真实世界条件下的发展。
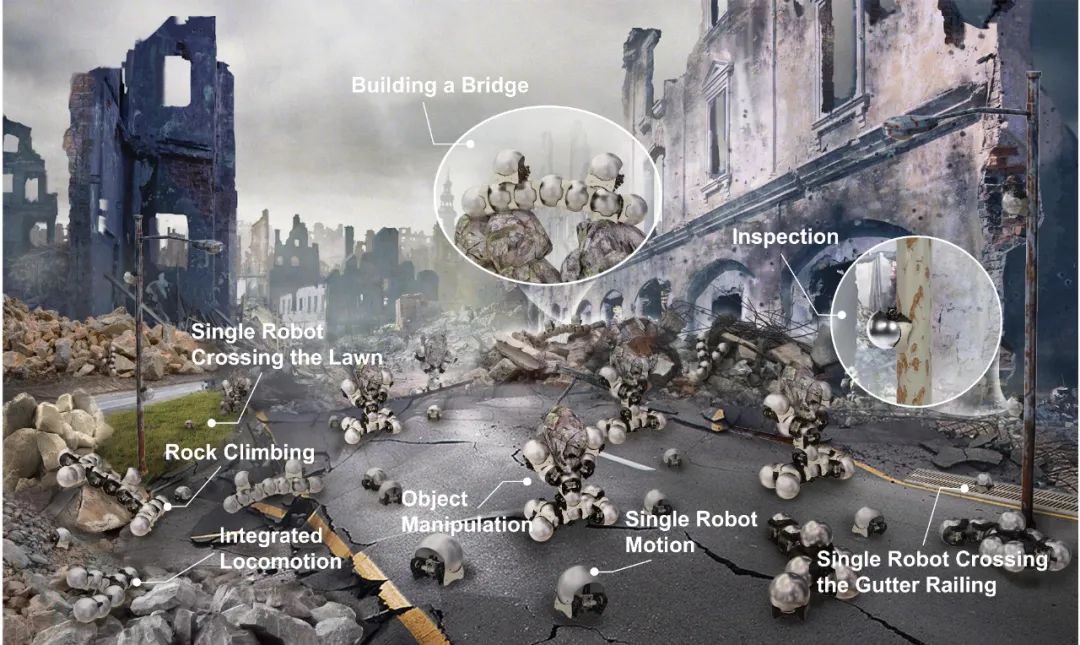
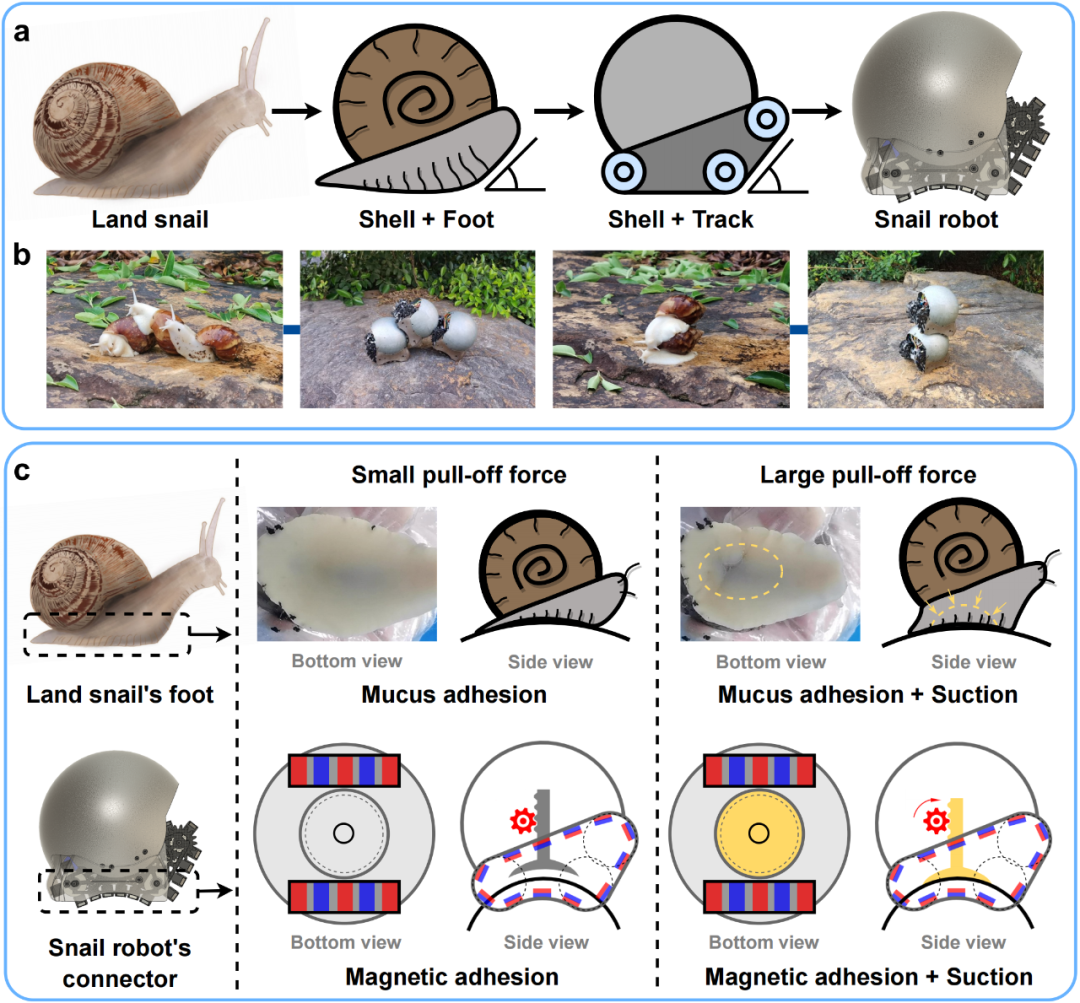
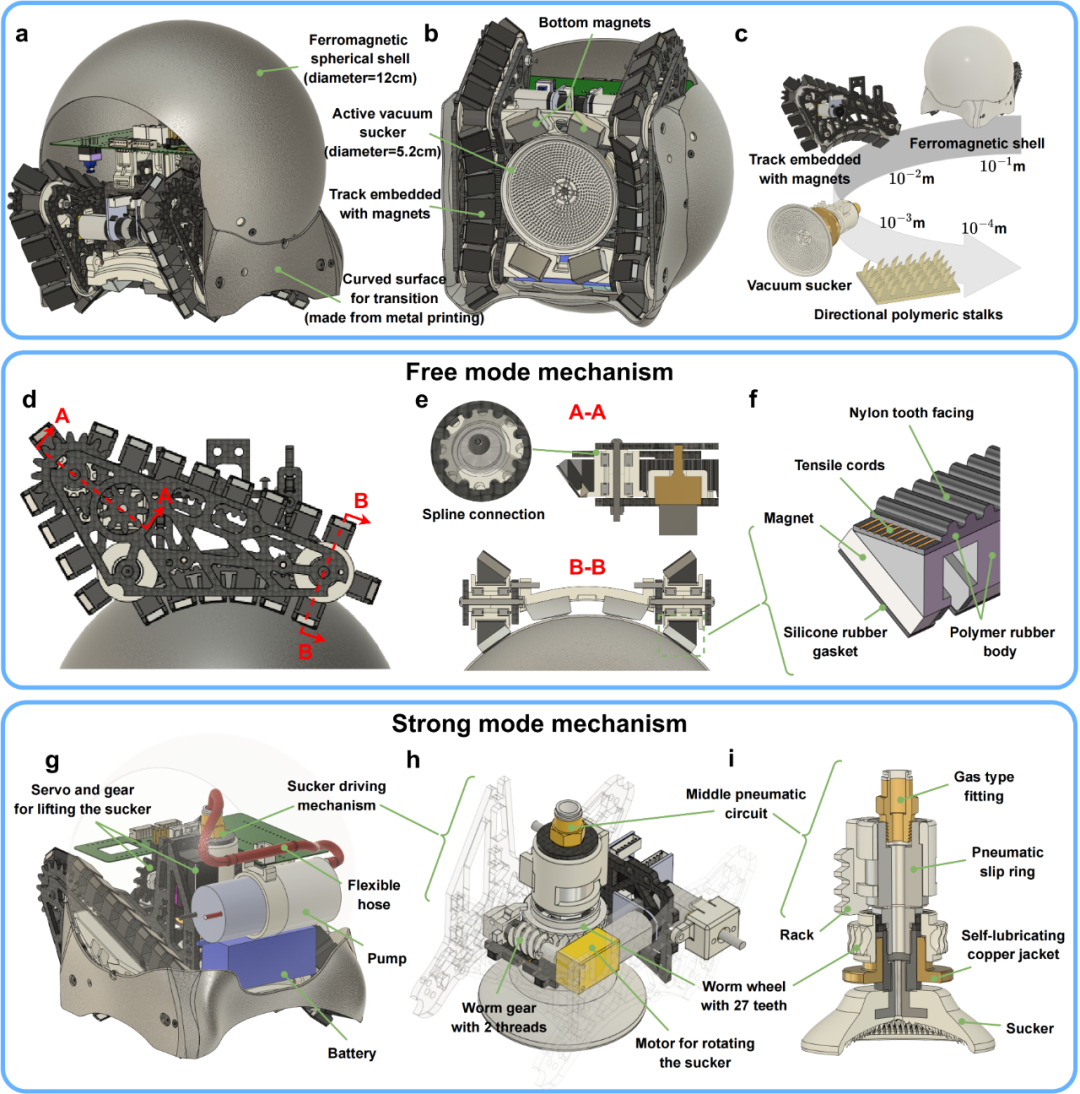
在面对户外环境部署陆地机器人群体的挑战时,研究人员的设计集中在两个关键领域。首先,致力于开发一种新型的模块化自重构机器人,能够单独或作为群体在户外环境中有效运作。这种机器人的设计受到陆地蜗牛形态学的启发,尤其是它们在复杂地形中运动的能力。借鉴蜗牛的爬行和附着行为,机器人装备了球形外壳和可移动的“足”,显著提高了它们的机动性。这样的设计还使机器人集群能够通过铁磁性外壳相互连接,形成灵活的大型结构以执行更复杂的任务。
第二个设计重点是创造一种高效且稳定的连接机制。传统的自由形式连接器通常缺乏稳固的连接机构,为了解决这一问题,研究人员开发了一种双模式连接机制。这一机制结合了磁力吸附和真空吸附系统,灵感来源于蜗牛对不同外力的适应策略。这种混合连接方式允许机器人在任何位置动态地进行附着,同时,真空吸附可以在受到外部压力时增强连接的稳定性。这种创新的连接器设计不仅提供了连接位置的灵活性,还维持了整个机器人群体的结构完整性,这对于在多变的户外环境中的有效操作至关重要。
这些机器人集群巧妙地借鉴了蜗牛在自然界中的生存策略,将其应用于解决现代技术中的实际问题。通过这种方式,机器人能够灵活地适应复杂和多变的户外地形,展示出科技与自然融合的美妙。
▍创新连接机制:磁性履带与吸盘系统
蜗牛机器人采用了自由磁性连接和固定式吸盘连接两种机制。在自由磁性连接模式下,机器人主要依靠装有嵌入式磁铁的两条履带。这些履带由轻质的软聚合物橡胶和同步带构成,磁铁嵌入在软聚合物橡胶内,以增强与球形表面的接触贴合度。履带的横截面设计包括尼龙齿和绳索,以及聚合物橡胶主体部分。同时,硅橡胶垫圈的添加则增加了履带与机器人壳体之间的摩擦力,提高了连接的稳定性。在固定吸盘连接机制中,当蜗牛机器人需要更强的连接力时,它会通过齿条驱动吸盘伸展以接触下方的球形壳体。机器人的主体装有负压空气泵,该泵通过柔性软管与中心的旋转气动电路相连。吸盘始终保持与球形壳体的紧密接触,并通过单通道气动旋转环实现360度旋转,同时不损失由空气泵提供的负压。这种设计使得连接不仅稳固,还能在不同方向上进行灵活调整,以适应复杂的外部环境。
▍双模式操作:适应多样化功能需求
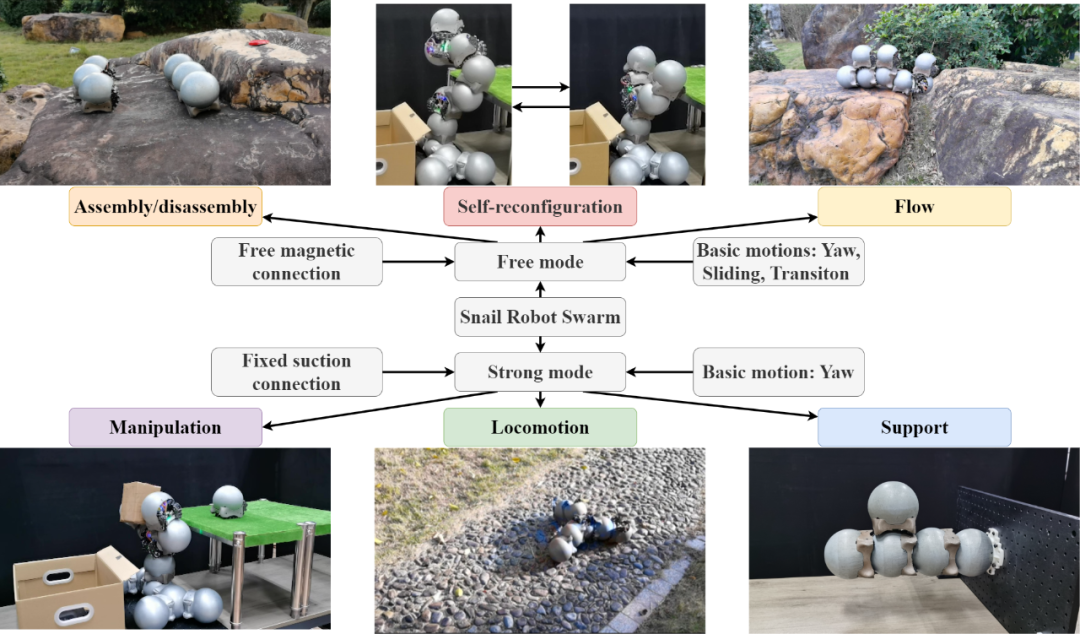
研究人员将陆地机器人群体的多样化功能分为六大类:自组装/自分离、自重组、流动运动、操控、移动和支撑。这些任务对移动性和连接强度的需求各不相同,因此蜗牛机器人开发了两种不同的操作模式:自由模式和强力模式。在自由模式下,机器人利用嵌入磁铁的差速履带,实现灵活的磁性连接。这种模式可以执行旋转、滑动和模块间转移等三个主要动作,适合需要高灵活性的任务,自组装/自分离、自重组、流动运动。磁性连接使得机器人能够在其他机器人表面上灵活、平滑地移动,增强了群体在动态环境中的适应能力。而强力模式则用于需要更高结构稳定性和更强连接的任务。在这种模式下,机器人利用可伸缩的真空吸盘,增强了抵抗外部扭矩能力,同时也拥有了更大的旋转驱动扭矩。这一模式对于执行更具挑战性的任务至关重要,如操控、移动和支撑,这些任务可能需要多个机器人相连或形成延伸的悬臂结构。
▍单机运动测试
为了测试蜗牛机器人集群的性能,研究人员分别在户外进行了单个机器人的移动测试和多机协同操作的测试。单个蜗牛机器人可以在户外不平整地面移动,也可以通过一些较窄的沟壑。

另外,单个蜗牛机器人也能在草坪这种较柔软的地面移动。

▍多机器人协同工作
然而,当单个蜗牛机器人面对较为崎岖的地形时,由于其体积的限制,往往难以顺利通过。研究人员为了全面评估这些机器人的实际应用潜力,对多个机器人的协作运动进行了一系列的测试。研究人员测试了蜗牛机器人集群在不同复杂环境下的通过能力,其中包括天然石头台阶:

或者是整体通过人工鹅卵石地面:

以及以流动运动通过天然沟壑等难度较高的地形:

这些测试旨在验证集群协作时能否克服单机运动的局限性,展现出更强的适应性和能力。
同时,研究人员也对蜗牛机器人集群的操作能力进行了深入的测试。首先,在户外环境中,多个蜗牛机器人协同形成机械臂,成功地将放置在巨石上的单个蜗牛机器人安全运送至地面:

此外,研究人员还展示了由7个蜗牛机器人模块组成的单臂机械臂如何自我重组成一个双臂机械臂,自由移动的机器人与双臂机械臂协作,共同将一个物块搬运到纸箱中:
这些实验不仅展现了蜗牛机器人在复杂环境下的适应性和协作能力,也验证了它们在执行精细任务时的高效性。
▍潜力巨大,未来可期
研究人员相信,电影《超能陆战队》中具备自由重构特性的"微磁机器人"展现了模块化自重构机器人的极致潜能。蜗牛机器人集群的开发与应用,正是对此类机器人在户外实际环境中部署的一次重要尝试。展望未来,研究人员计划继续推进这一项目,重点研究提升机器人的感知能力、模块间的异构化以及自重构运动规划的算法,以进一步拓展其功能和应用范围。
▍其他信息
本文通讯作者为香港中文大学(深圳)林天麟教授,第一作者为硕士研究生赵达。本研究得到了国家自然科学基金、科技部重点研发计划、广东省杰出青年科学基金的大力支持和帮助。课题组链接:https://freeformrobotics.org/


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









