







C++实现Canny算子 进行边缘检测
前言
使用C++和opencv实现Canny算子进行边缘检测
一、Canny算子原理
先利用高斯函数对图像进行低通滤波;然后对图像中的每个像素进行处理,寻找边缘的位置及在该位置的边缘法向,并采用一种称之为“非极值抑制”的技术在边缘法向寻找局部最大值;最后对边缘图像做滞后阈值化处理,消除虚假响应。
二、C++实现Canny算子
1.步骤
Canny边缘检测算法可以分为以下5个步骤:
-
使用高斯滤波器,以平滑图像,滤除噪声。 -
计算图像中每个像素点的梯度强度和方向。 Gx = [ f(x+1,y-1)+2*f(x+1,y)+f(x+1,y+1)] - [f(x-1,y-1)+2*f(x-1,y)+f(x-1,y+1) ] Gy = [ f(x-1,y-1) + 2f(x,y-1) + f(x+1,y-1)] - [f(x-1, y+1) + 2*f(x,y+1)+f(x+1,y+1)
梯度方向示意图:

-
应用非极大值(Non-Maximum Suppression)抑制,以消除边缘检测带来的杂散响应。 -
应用双阈值(Double-Threshold)检测来确定真实的和潜在的边缘。 -
通过抑制孤立的弱边缘最终完成边缘检测。
2.C++代码如下
// Canny.cpp : 此文件包含 "main" 函数。程序执行将在此处开始并结束。
//
#include <iostream>
#include<string>
#include<cmath>
#include<vector>
#include<gdal.h>
#include<opencv2/highgui/highgui.hpp>
#include<opencv2/opencv.hpp>
#include "cpl_conv.h"
#include<algorithm>
#include<cstring>
using namespace std;
using namespace cv;
#define PI 3.1415;
void Canny(Mat img,Mat img2,string str2)
{
int r, c;
int rows = img.rows - 1;
int cols = img.cols - 1;
int add, des;
int IX, IY,gx,gy;//xy方向梯度
float m;//模,
double angle_atanValue;
double arctan;//arctan
double angle;//方向
Mat Gauss(rows+1,cols+1,CV_32FC1,Scalar::all(0));
//
Mat Gray(rows + 1, cols + 1, CV_8UC1, Scalar::all(0)); //= 0.299R + 0.587G + 0.114B
//step1:高斯滤波
//Canny算子通常处理的图像是灰度图像,若不是灰度图像,先对彩色图像灰度化,再高斯滤波处理
//cvtColor(img, Gray, COLOR_BGR2GRAY);//灰度化
GaussianBlur(img, Gauss, Size(5, 5), 0,0);
//imshow("Gauss", Gauss);
//cv::waitKey(0);
//step2:计算梯度和方向
Mat GX(rows + 1, cols + 1, CV_32SC1, Scalar::all(0));//x梯度矩阵
Mat GY(rows + 1, cols + 1, CV_32SC1, Scalar::all(0));//y梯度矩阵
Mat M(rows+1,cols+1,CV_32FC1,Scalar::all(0));//模矩阵
// Mat Angle(rows + 1, cols + 1, CV_32FC1, Scalar::all(0));//角度矩阵
Mat Direction(rows + 1, cols + 1, CV_32SC1, Scalar::all(0));//方向矩阵:0、1、2、3
for ( r = 0; r < rows+1; r++)
{
for ( c = 0; c < cols+1; c++)
{
add = 1, des = 1;
if (r == 0 || c == 0) des = 0;
if (r == rows || c == cols) add = 0;
// Gx = [f(x + 1, y - 1) + 2 * f(x + 1, y) + f(x + 1, y + 1)] - [f(x - 1, y - 1) + 2 * f(x - 1, y) + f(x - 1, y + 1)]
//Gy = [f(x - 1, y - 1) + 2f(x, y - 1) + f(x + 1, y - 1)] - [f(x - 1, y + 1) + 2 * f(x, y + 1) + f(x + 1, y + 1)
gx = (Gauss.at<uchar>(r+add,c-des)+2* Gauss.at<uchar>(r+add,c)+ Gauss.at<uchar>(r+add,c+add))-(Gauss.at<uchar>(r -des, c - des) + 2 * Gauss.at<uchar>(r-des, c) + Gauss.at<uchar>(r-des, c + add));
gy = (Gauss.at<uchar>(r -des, c - des) + 2 * Gauss.at<uchar>(r , c-des) + Gauss.at<uchar>(r + add, c -des)) - (Gauss.at<uchar>(r -des, c +add) + 2 * Gauss.at<uchar>(r , c+add) + Gauss.at<uchar>(r + add, c + add));
GX.at<int>(r, c) = gx;//计算xy方向梯度
GY.at<int>(r, c) = gy;
m = sqrt(pow(gx, 2) + pow(gy, 2));//计算模
M.at<float>(r, c) = m;
//cout << "gx:" << gx<< "gy:" << gy <<"m:"<<m<< endl;
//计算梯度方向:arctan(gx/gy):范围:-180~180°
//注:0°、180°为0;45°、-135°为1;90°、-90°为2;135°、-45°为3;
if (gy == 0 )//除数不能等于0
{
angle = 0;//当gy=0时,角度是0度
}
else
{
angle_atanValue = gx / gy;
arctan =atan(angle_atanValue);//计算arctan值
//可以看出:atan函数输出的是弧度! 如果想进行atan运算得到角度,需要乘以(180/PI)把弧度转为角度"
angle = arctan * 180 / PI;
}
// Angle.at<float>(r, c) = angle;//将角度存入矩阵
//cout << "angle:" << angle << endl;
//角度近似,分成四个方向
if ((angle> -22.5 && angle<=22.5)||(angle >=-180 && angle < -157.5)||(angle>157.5 && angle<=180))
{
Direction.at<int>(r, c) = 0;//-22.5°~22.5°和-157.5°~-180°、157.5~180方向设置为0
}
else if ((angle > 22.5 && angle <= 67.5) || (angle >= -67.5 && angle < -22.5))
{
Direction.at<int>(r, c) = 1;//22.5°~67.5°和-22.5°~-67.5°方向设置为1
}
else if ((angle >67.5 && angle <= 112.5) || (angle >= -112.5 && angle < -67.5))
{
Direction.at<int>(r, c) = 2;//67.5°~112.5°和247.5°~292.5°方向设置为2
}
else {
Direction.at<int>(r, c) = 3;//112.5°~157.5°和-112.5°~-157.5°方向设置为3
}
//cout << "Direction.at<int>(r, c):"<< Direction.at<int>(r, c) <<endl;
}
}
//step3:梯度方向局部非最大抑制
//至此我们得到了整幅图像上所有像素的方向
//int winR, winC;//窗口内的位置
//int size;//窗口大小
//Mat DX(rows + 1, cols + 1, CV_32SC1, Scalar::all(0));//用来存放梯度方向差值
for (r = 0; r < rows+1; r++)
{
for ( c = 0; c < cols+1; c++)//遍历整幅图像
{
int d,d1,d2;//用来暂存梯度值
/*for ( winR = 0; winR < size; winR++)//窗口内比较梯度
{
for ( winC = 0; winC < size; winC++)
{
*/
//cout << "lalala" << endl;
if (r == 0 || c == 0) des = 0;
if (r == rows || c == cols) add = 0;
if (Direction.at<int>(r, c) ==0)//如果是0方向上,对f(x,y),f(x,y+1),f(x,y-1)的灰度值进行比大小,看f(x,y)是不是最大值
{
//cout << "Direction.at<int>(r, c)" << Direction.at<int>(r, c) << endl;
d = Gauss.at<uchar>(r , c );
d1 = Gauss.at<uchar>(r , c - des);
d2 = Gauss.at<uchar>(r , c + add);
if (d<d1 || d<d2)
{
Gauss.at<uchar>(r , c ) = 0;//如果不是最大,将像素设为0
// cout << "r:"<<r<<"c:"<<c<<"Gauss.at<float>(r , c ):"<< Gauss.at<uchar>(r, c) << endl;
}
}
else if (Direction.at<int>(r , c ) == 1)//如果是1方向上,对f(x,y),f(x+1,y-1),f(x-1,y+1)的灰度值进行比大小,看f(x,y)是不是最大值
{
d = Gauss.at<uchar>(r , c );
d1 = Gauss.at<uchar>(r +add, c - des);
d2 = Gauss.at<uchar>(r -des, c + add);
if (d < d1 || d < d2)
{
Gauss.at<uchar>(r, c) = 0;//如果不是最大,将像素设为0
// cout << "r:" << r << "c:" << c << "Gauss.at<float>(r , c ):" << Gauss.at<uchar>(r, c) << endl;
}
}
else if (Direction.at<int>(r , c ) == 2)//如果是2方向上,对f(x,y),f(x+1,y),f(x-1,y)的灰度值进行比大小,看f(x,y)是不是最大值
{
d = Gauss.at<uchar>(r , c );
d1 = Gauss.at<uchar>(r + add, c );
d2 = Gauss.at<uchar>(r - des, c );
if (d < d1 || d < d2)
{
Gauss.at<uchar>(r, c) = 0;//如果不是最大,将像素设为0
//cout << "r:" << r << "c:" << c << "Gauss.at<float>(r , c ):" << Gauss.at<uchar>(r, c) << endl;
}
}
else//如果是3方向上,对f(x,y),f(x+1,y+1),f(x-1,y-1)的灰度值进行比大小,看f(x,y)是不是最大值
{
d = Gauss.at<uchar>(r, c );
d1 = Gauss.at<uchar>(r + add, c +add);
d2 = Gauss.at<uchar>(r - des, c -des);
if (d < d1 || d < d2)
{
Gauss.at<uchar>(r, c) = 0;//如果不是最大,将像素设为0
// cout << "r:" << r << "c:" << c << "img.at<float>(r , c ):" << Gauss.at<uchar>(r, c) << endl;
}
}
// cout << "Gauss.at<float>(r, c):" << Gauss.at<uchar>(r, c) << endl;
/* }
}*/
}
}
//至此我们重新构造了图像,其中可疑边缘处的像素仍保留像素原值,非边缘位置像素为0
//step4:双阈值和链接边缘
cout << "step4" << endl;
float high_value=30.0;//高阈值
float low_value=20.0;//低阈值
Mat Location(rows + 1, cols + 1, CV_32SC1, Scalar::all(0));//可疑边缘点的位置
//int add=1, des = 1;
for ( r = 0; r < rows+1; r++)
{
for ( c = 0; c < cols+1; c++)
{
add = 1,des = 1;
if (r == 0 || c == 0) des = 0;
if (r == rows || c == cols) add = 0;
float m1,m2,m3,m4,m5,m6,m7,m8,m9,maxm;//暂存梯度值
if (Gauss.at<uchar>(r, c) != 0)//是可疑点时
{
//cout << "判断可疑点" << endl;
m5 = M.at<float>(r, c);
if (m5 >= high_value)
{
//强边缘点
Location.at<int>(r,c) = 1;
}
else if (m5 <= low_value)
{
//不是边缘点
Location.at<int>(r, c) =0;
Gauss.at<uchar>(r, c) = 0;
}
else
{
//如果low_value < m <high_value
m1= M.at<float>(r - des, c-des);
m2= M.at<float>(r , c - des);
m3 = M.at<float>(r + add, c - des);
m4 = M.at<float>(r - des, c );
m6 = M.at<float>(r + add, c );
m7 = M.at<float>(r - des, c +add);
m8 = M.at<float>(r , c + add);
m9 = M.at<float>(r +add, c + add);
maxm = MAX(m1,m2,m3,m4,m5,m6,m7,m8,m9);
if (maxm>high_value)
{
Gauss.at<uchar>(r, c) = 1;
}
else
{
Gauss.at<uchar>(r, c) = 0;
}
}
}
}
}
namedWindow("Canny",WINDOW_NORMAL);
imshow("Canny", Gauss);
imwrite(str2, Gauss);
cv::waitKey(0);
}
int main()
{
string str = "D://学习课件//数字摄影测量//实验指导//实验指导//实验数据//实验2//DJI_0011.JPG";
string str2= "D://学习课件//数字摄影测量//实验指导//实验指导//Canny4.JPG";
Mat img, img2;
img = imread(str,IMREAD_GRAYSCALE);
img2 = imread(str,IMREAD_COLOR);
if (img.empty() || img2.empty())
{
cout << "无法打开图像" << endl;
}
else
{
cout << "OKKKKKKKKK" << endl;
}
Canny(img,img2,str2);
std::cout << "Hello World!\n";
}
// 运行程序: Ctrl + F5 或调试 >“开始执行(不调试)”菜单
// 调试程序: F5 或调试 >“开始调试”菜单
// 入门使用技巧:
// 1. 使用解决方案资源管理器窗口添加/管理文件
// 2. 使用团队资源管理器窗口连接到源代码管理
// 3. 使用输出窗口查看生成输出和其他消息
// 4. 使用错误列表窗口查看错误
// 5. 转到“项目”>“添加新项”以创建新的代码文件,或转到“项目”>“添加现有项”以将现有代码文件添加到项目
// 6. 将来,若要再次打开此项目,请转到“文件”>“打开”>“项目”并选择 .sln 文件
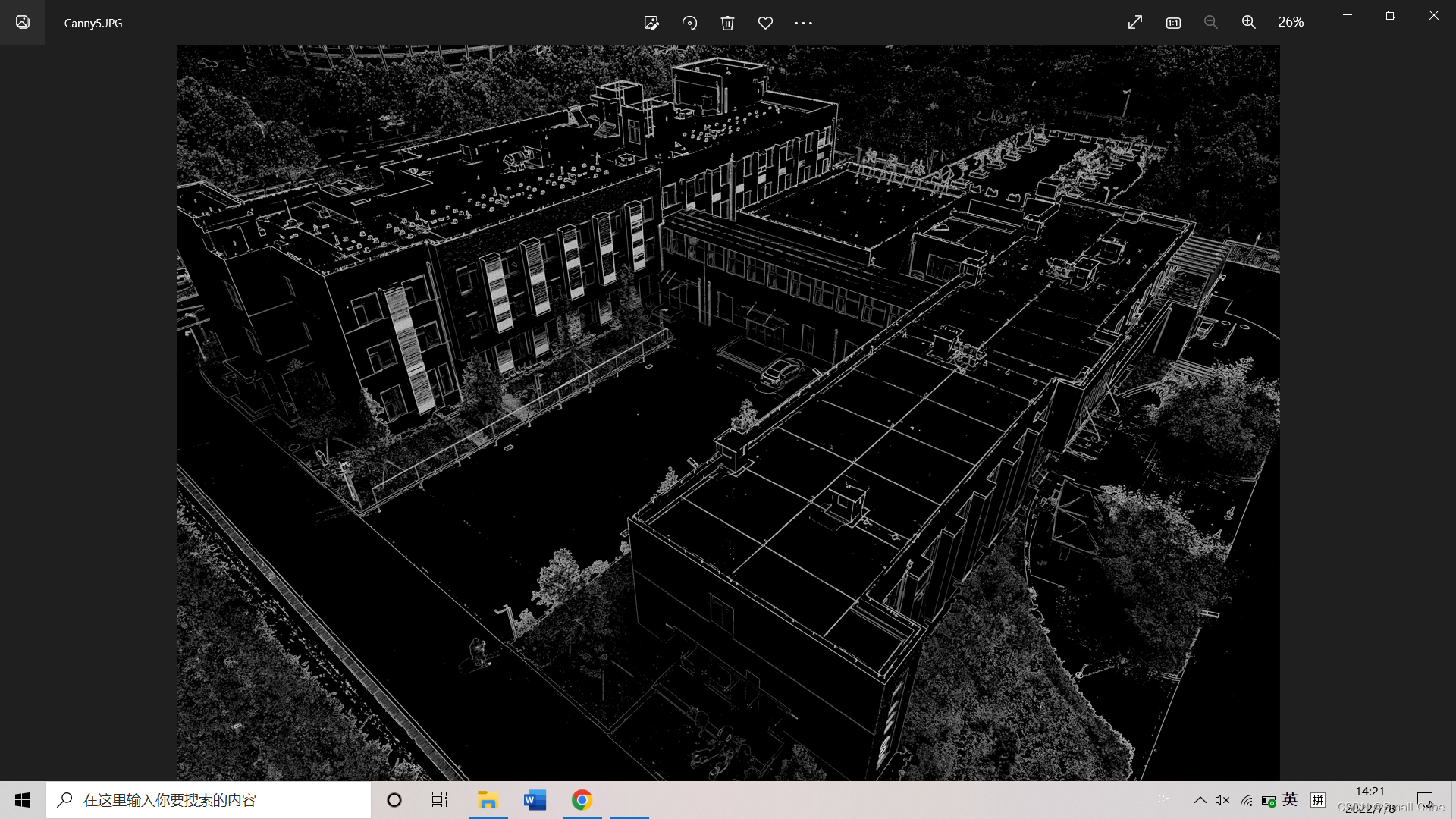
三、Canny算子运行结果
原图:

结果:















 316
316











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









