







前言
首先,本人是一名大二学生,第一次参加蓝桥杯比赛。在比赛前的一个月,我几乎将大量精力花在备战蓝桥杯上,周末或是没课的时侯都专注于刷往届赛题。在网上有很多什么速通的课程,但本人比较推荐小蜜蜂老师和西风的。对于想要完全搞懂这款单片机基本原理的可以看小蜜蜂老师的,但如果你是那种想混个奖项的,那就首选西风的视频吧,不要犹豫!一个偏于原理,一个更加偏于速成。
在讲下我个人情况,毕竟是个人赛后心得。赛前我在网上看了很多种写法,最后我是结合了西风和小蜜蜂的代码,综合了一个自己的代码风格。省赛题目主要考的是DS1302、DS18B20和IIC总线三个,往年也是主要集中于这三个。赛前一个月,我几乎将10届到14届的所有省赛题都刷了一遍,个人感觉光看视频教学没有意义,一定要动手亲自刷题。
获奖情况
“功夫不负有心人”。省一!!!

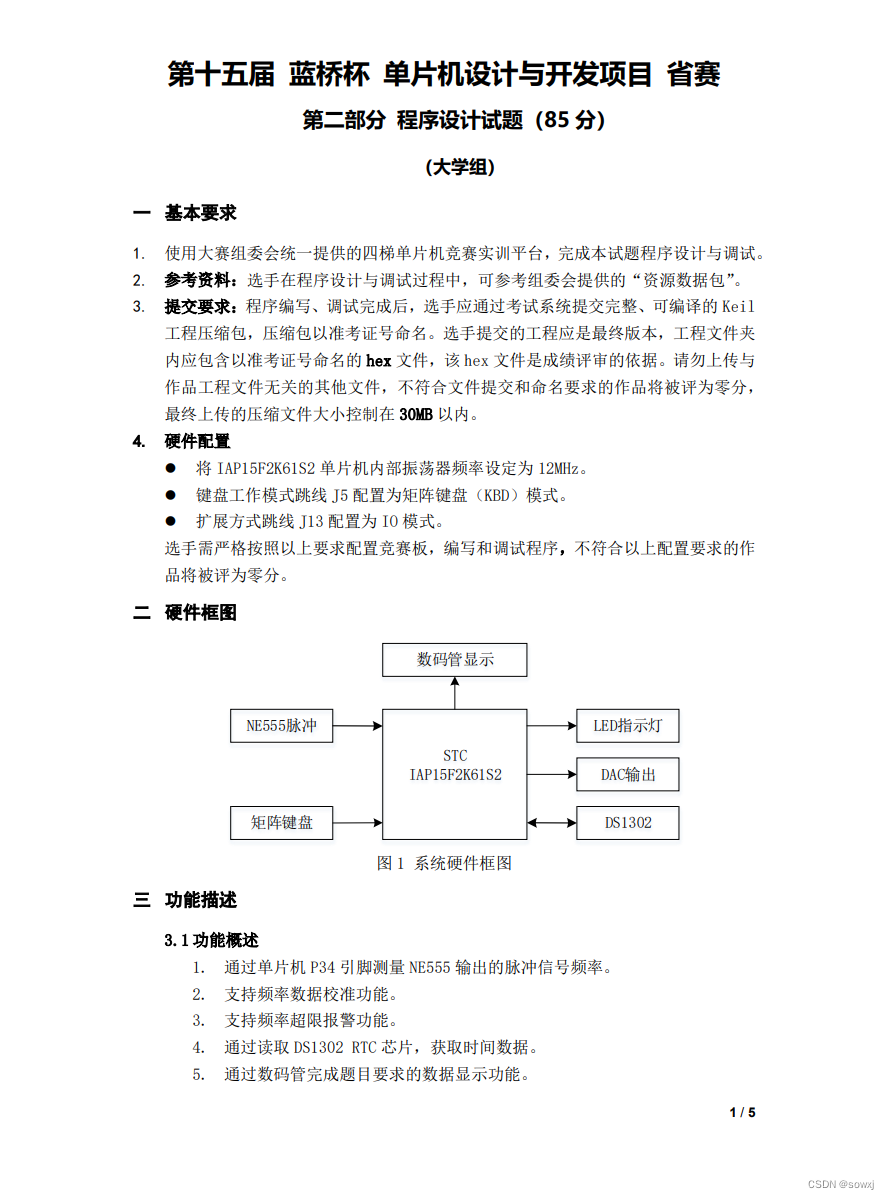
试题分析
首先要说,今年难度确实要比去年14届的题目要简单,大部分功能也比较常规,按键也没有往年复杂(长、短按、双击等),但是考的更多的是细节处理。就比如NE555的频率处理,调试值为负数时的越界问题等。所以,严格来说今年试题也不轻松!!!
演示
主函数
#include <STC15F2K60S2.H>
#include "Key.h"
#include "Seg.h"
#include "Led.h"
#include "ds1302.h"
#include "iic.h"
unsigned char Key_time;
unsigned int Seg_time;
unsigned char Key_value, Key_dowm, Key_up, Key_old;
unsigned char Seg_buf[]={10,10,10,10,10,10,10,10};
unsigned char Seg_pos;
unsigned char Seg_point[]={0,0,0,0,0,0,0,0};
unsigned char Led_buf[]={0,0,0,0,0,0,0,0};
unsigned int NE555;
unsigned int Time_1000ms;
unsigned char Mode;
unsigned int Big_can=2000; //超限参数
unsigned char Time[]={0x13,0x03,0x05}; //时间
unsigned char Mode_can; //S5参数切换
unsigned char Mode_hui; //S5回显切换
unsigned int Change_hz; //校准值
unsigned int Fu; //负数表示
unsigned int Ne555_true;
unsigned int MAX_HZ; //最大频率
unsigned char Time_mx[3]; //发生时间
unsigned char Da_V; //电压
unsigned char Time_200ms;
unsigned char State;
void Key_get()
{
if(Key_time)return;
Key_time=1;
Key_value=Key_read();
Key_dowm=Key_value&(Key_value^Key_old);
Key_up=~Key_value&(Key_value^Key_old);
Key_old=Key_value;
switch(Key_dowm)
{
case 4:
if(++Mode==4)Mode=0;
if(Mode==1)
{
Mode_can=0;
}
if(Mode==3)Mode_hui=0;
break;
case 5:
if(Mode==1)
Mode_can=1-Mode_can;
if(Mode==3)
Mode_hui=1-Mode_hui;
break;
case 8:
if(Mode==1) //参数界面
{
if(Mode_can==0) //超限界面
{
Big_can+=1000;
if(Big_can==10000)Big_can=9000;
}
if(Mode_can==1) //校准界面
{
if(Change_hz>=0 && Fu==0)
{
Change_hz+=100;
if(Change_hz==1000)Change_hz=900;
}
if(Fu<=900 && Fu>0)
{
Fu-=100;
}
}
}
break;
case 9:
if(Mode==1) //参数界面
{
if(Mode_can==0) //超限界面
{
Big_can-=1000;
if(Big_can==0)Big_can=1000;
}
if(Mode_can==1) //校准界面
{
if(Change_hz==0 && Fu>=0)
{
Fu+=100;
if(Fu==1000)Fu=900;
}
if(Change_hz<=900 && Change_hz>0)
{
Change_hz-=100;
}
}
}
break;
}
}
void Seg_get()
{
if(Seg_time)return;
Seg_time=1;
DS1302_read(Time);
if(Ne555_true<=500)Da_V=1;
if(Ne555_true>=Big_can)Da_V=5;
if(Ne555_true>500 && Ne555_true<Big_can)
Da_V=(12*Ne555_true-500)/(3*Big_can-1500)-(Big_can/(3*Big_can-1500));
if(Ne555_true>50000)Da_V=0;
Da_read(Da_V*51);
switch(Mode)
{
case 0:
Seg_buf[0]=11;
Seg_buf[1]=10;
Seg_buf[2]=10;
if(Ne555_true>0 && Ne555_true<50000)
{
Seg_buf[3]=(Ne555_true>=10000)?(Ne555_true/10000):10;
Seg_buf[4]=(Ne555_true>=1000)?(Ne555_true/1000%10):10;
Seg_buf[5]=(Ne555_true>=100)?(Ne555_true/100%10):10;
Seg_buf[6]=(Ne555_true>=10)?(Ne555_true/10%10):10;
Seg_buf[7]=(Ne555_true>0)?(Ne555_true%10):10;
}
else if(Ne555_true>50000)
{
Seg_buf[3]=10;
Seg_buf[4]=10;
Seg_buf[5]=10;
Seg_buf[6]=16;
Seg_buf[7]=16;
}
break;
case 1:
if(Mode_can==0)
{
Seg_buf[0]=12;
Seg_buf[1]=1;
Seg_buf[3]=10;
Seg_buf[4]=Big_can/1000;
Seg_buf[5]=Big_can/100%10;
Seg_buf[6]=Big_can/10%10;
Seg_buf[7]=Big_can%10;
}
if(Mode_can==1)
{
Seg_buf[0]=12;
Seg_buf[1]=2;
Seg_buf[3]=10;
Seg_buf[4]=(Fu>0)?13:10;
if(Change_hz>=100 && Fu==0)Seg_buf[5]=Change_hz/100%10;
else if(Fu>=100 && Change_hz==0)Seg_buf[5]=Fu/100%10;
else Seg_buf[5]=10;
if(Change_hz>=10)Seg_buf[6]=Change_hz/10%10;
else if(Fu>=10)Seg_buf[6]=Fu/10%10;
else Seg_buf[6]=10;
Seg_buf[7]=Change_hz%10;
}
break;
case 2:
Seg_buf[0]=Time[0]/16;
Seg_buf[1]=Time[0]%16;
Seg_buf[2]=13;
Seg_buf[3]=Time[1]/16;
Seg_buf[4]=Time[1]%16;
Seg_buf[5]=13;
Seg_buf[6]=Time[2]/16;
Seg_buf[7]=Time[2]%16;
break;
case 3:
if(Mode_hui==0)
{
Seg_buf[0]=14;
Seg_buf[1]=11;
Seg_buf[2]=10;
Seg_buf[3]=(MAX_HZ>=10000)?(MAX_HZ/10000):10;
Seg_buf[4]=(MAX_HZ>=1000)?(MAX_HZ/1000%10):10;
Seg_buf[5]=(MAX_HZ>=100)?(MAX_HZ/100%10):10;
Seg_buf[6]=(MAX_HZ>=10)?(MAX_HZ/10%10):10;
Seg_buf[7]=(MAX_HZ>0)?(MAX_HZ%10):10;
}
if(Mode_hui==1)
{
Seg_buf[0]=14;
Seg_buf[1]=15;
Seg_buf[2]=Time_mx[0]/16;
Seg_buf[3]=Time_mx[0]%16;
Seg_buf[4]=Time_mx[1]/16;
Seg_buf[5]=Time_mx[1]%16;
Seg_buf[6]=Time_mx[2]/16;
Seg_buf[7]=Time_mx[2]%16;
}
break;
}
}
void Led_get()
{
unsigned char i;
if(Change_hz>=0 && Fu==0) //校准为正数时
{
Ne555_true=NE555+Change_hz;
}
if(Fu>=0 && Change_hz==0) //校准为负数时
{
Ne555_true=NE555-Fu;
}
if(MAX_HZ<Ne555_true && Ne555_true<50000)
{
MAX_HZ=Ne555_true;
for(i=0;i<3;i++)
Time_mx[i]=Time[i];
}
if(Mode==0)
Led_buf[0]=(State);
else Led_buf[0]=0;
if(Ne555_true>Big_can)
Led_buf[1]=(State);
else Led_buf[1]=0;
}
void Timer0_Init() //定时器0
{
AUXR &= 0x7F;
TMOD &= 0xF0;
TMOD |= 0x05;
TL0 = 0;
TH0 = 0;
TF0 = 0;
TR0 = 1;
}
void Timer1_Init() //定时器1
{
AUXR &= 0xBF;
TMOD &= 0x0F;
TL1 = 0x18;
TH1 = 0xFC;
TF1 = 0;
TR1 = 1;
EA=1;
ET1=1;
}
void main()
{
InitHC138(4,0xff);
InitHC138(5,0x00);
Timer0_Init();
Timer1_Init();
DS1302_write(Time);
while(1)
{
Key_get();
Seg_get();
Led_get();
}
}
void Init_T1() interrupt 3
{
if(++Key_time==10)Key_time=0;
if(++Seg_time==500)Seg_time=0;
if(++Seg_pos==8)Seg_pos=0;
SMG(Seg_pos,Seg_buf[Seg_pos],Seg_point[Seg_pos]);
Led_read(Seg_pos,Led_buf[Seg_pos]);
if(++Time_1000ms==1000)
{
Time_1000ms=0;
NE555=(TH0<<8)|TL0;
TH0=TL0=0;
}
if(++Time_200ms==200)
{
Time_200ms=0;
State^=1;
}
}
15届蓝桥杯试题演示
该文章由本人原创作品,创作不易。点赞+关注 后面创作详细教程。















 700
700

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









