







永磁同步电机电流内环PR控制Matlab/simulink仿真模型,参数已设置好,可直接运行。
属于PMSM转速电流双闭环矢量控制系统模型。
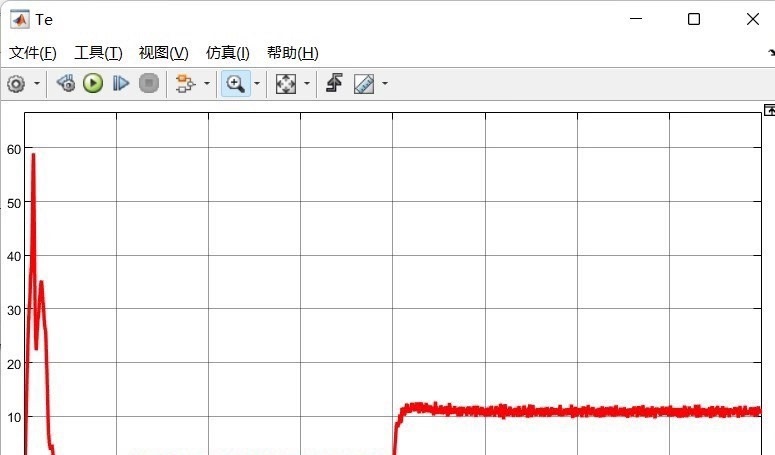
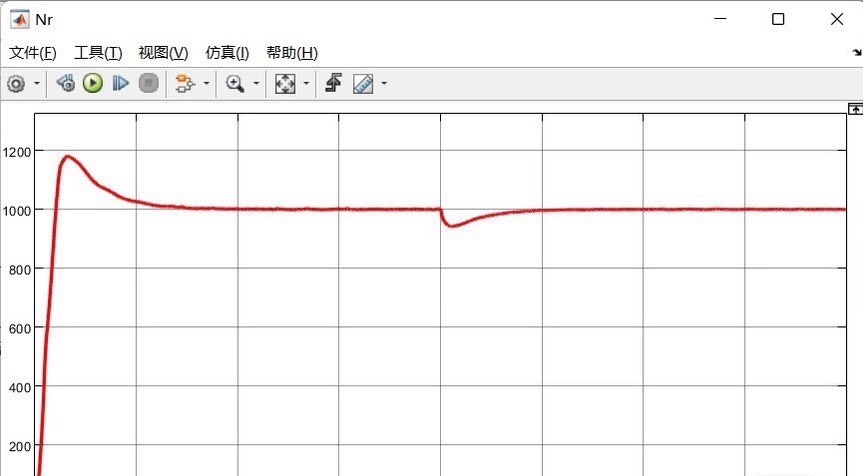
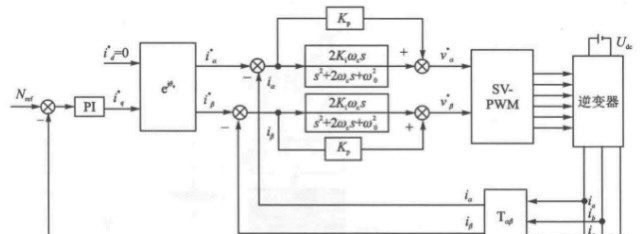
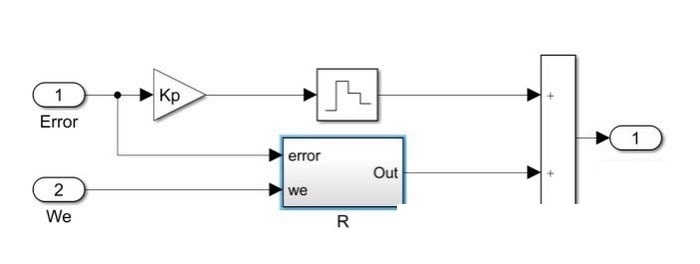
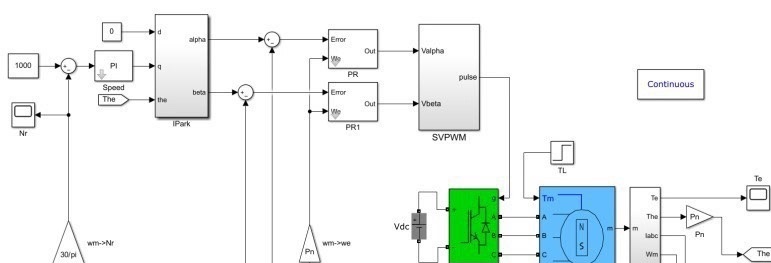
电流内环采用PR控制器,不需要旋转坐标变换,在静止坐标下进行矢量控制,转速外环采用PI控制器。
波形完美,包含原理说明文档和参考文献。
ID:2122719218736882
蟹老板来喽
永磁同步电机是一种应用广泛的电机类型,其具有高效率、高功率密度和高控制精度等特点,在工业领域得到了广泛的
永磁同步电机电流内环PR控制Matlab/simulink仿真模型,参数已设置好,可直接运行。
属于PMSM转速电流双闭环矢量控制系统模型。
电流内环采用PR控制器,不需要旋转坐标变换,在静止坐标下进行矢量控制,转速外环采用PI控制器。
波形完美,包含原理说明文档和参考文献。
ID:2122719218736882
蟹老板来喽
永磁同步电机是一种应用广泛的电机类型,其具有高效率、高功率密度和高控制精度等特点,在工业领域得到了广泛的
 676
676

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章





















