






多目标点移动机器人改进路径规划算法代码
送餐机器人,AGV室内机器人仿真路径规划
采用改进A*算法融合模拟退火算法,规划多目标点路径规划。
解决路径与障碍物相撞,AGV不斜穿室内区间,采用水平垂直方向移动路径规划,圆弧转弯。
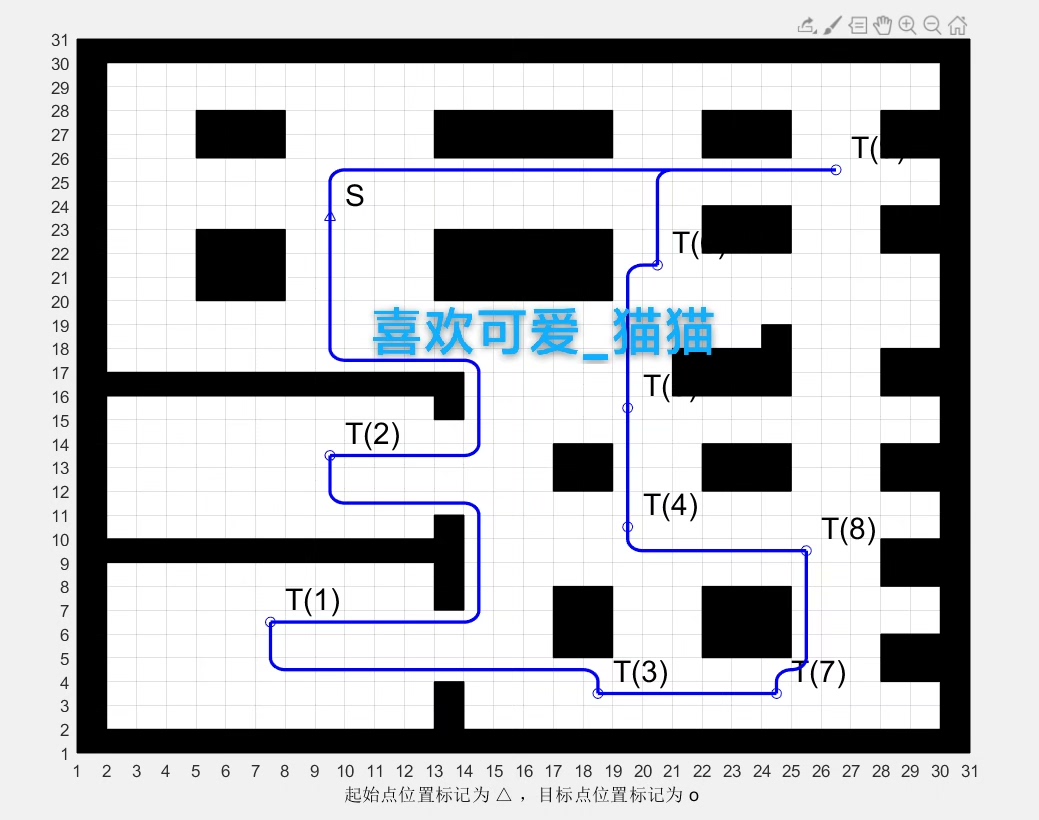
室内旅行商问题——送餐移动机器人(从厨房出发到达多个目标点,最后返回厨房)
1,改进A*算法规划两两之间的路径,并计算路径长度;
2,模拟退火算法依据两点之间路径长度,规划多个目标点的先后到达顺序;
3,组合最优顺序的路径,输出最后路线
ID:66170719221625136
喜欢可爱的猫猫

多目标点移动机器人改进路径规划算法代码
送餐机器人,AGV室内机器人仿真路径规划
随着智能机器人技术的迅速发展,移动机器人在各个领域得到了广泛的应用。特别是在餐饮行业,送餐机器人的出现为餐厅提供了更加高效、便捷的服务。然而,在送餐过程中,机器人需要规划合理的路径,以避免与障碍物相撞,并快速到达目标点。因此,如何优化移动机器人的路径规划算法成为了极具挑战性的问题。
本文将介绍一种基于改进A*算法融合模拟退火算法的多目标点路径规划方法,以解决路径与障碍物相撞、AGV不斜穿室内区间等问题,并采用水平垂直方向移动路径规划及圆弧转弯方法,实现室内旅行商问题的送餐移动机器人。
首先,我们采用改进A算法规划两两目标点之间的路径,并计算路径长度。传统的A算法在搜索过程中只考虑了最短路径,而对于多目标点的情况,我们需要考虑多个目标点之间的顺序。因此,我们在A*算法中引入了目标点的顺序信息,使得在搜索过程中能够根据目标点的顺序优先选择合适的路径。
接下来,我们引入模拟退火算法,依据两点之间的路径长度,规划多个目标点的先后到达顺序。模拟退火算法是一种全局优化算法,它模拟了物质退火的过程,通过随机选择较差解并以一定概率接受它们,以避免陷入局部最优解。在路径规划中,我们将目标点的先后顺序作为解空间的一维坐标,通过模拟退火算法寻找到达目标点最优的顺序。
最后,我们将最优顺序的路径组合起来,输出最终的路线。通过将改进A*算法和模拟退火算法相结合,我们能够得到更加合理、高效的路径规划结果。同时,为了实现机器人的平滑移动,我们采用了水平垂直方向移动路径规划以及圆弧转弯的方法,使得机器人能够在室内区间中灵活、快速地移动。
通过以上的路径规划算法,我们可以有效地解决送餐移动机器人的室内旅行商问题。机器人能够从厨房出发,依次到达多个目标点,并最终返回厨房。通过改进A*算法和模拟退火算法的组合运用,我们能够获得最优的路径规划结果,提高机器人的送餐效率以及整体服务质量。
总结起来,本文基于改进A算法融合模拟退火算法,提出了一种多目标点移动机器人的路径规划方法。该方法能够解决路径与障碍物相撞、AGV不斜穿室内区间等问题,并通过水平垂直方向移动路径规划及圆弧转弯方法实现室内旅行商问题的送餐移动机器人。通过在A算法中引入目标点的顺序信息和模拟退火算法的全局优化能力,我们能够得到更加合理、高效的路径规划结果,提高机器人的运行效率和服务质量。希望本文的研究能够为送餐机器人的设计和开发提供一定的参考和借鉴。
以上相关代码,程序地址:http://wekup.cn/719221625136.html















 1077
1077











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









