







RSE2021/云检测:Automatic cloud and cloud shadow detection in tropical areas for PlanetScope satellite images用于PlanetScope卫星图像的热带地区自动云和云阴影检测
0.摘要
具有3米分辨率和几乎每日全球覆盖的PlanetScope卫星数据已越来越多地用于陆地表面监测,从土地覆盖变化探测到植被生物物理表征和生态评估。与其他卫星数据类似,在PlanetScope图像中有效筛选云和云阴影是这些应用的先决条件,但仍然具有挑战性,因为PlanetScope的1)光谱波段比其他卫星少,阻碍了传统方法的使用,2)不一致的卫星传感器辐射校准,使使用固定阈值的云/阴影检测不现实。为了解决这些挑战,我们开发了一种用于自动云和阴影筛选的时空集成方法(“STI-ACSS”),包括两个步骤:(1)通过自适应阈值方法集成空间(即单个PlanetScope图像的云/阴影指数)和时间(即PlanetScope图像时间序列中的反射异常值)信息,生成云/阴影的初始掩码;(2)将形态学处理与基于对象的云和云阴影匹配相结合,对这些初始掩码进行两步微调,得到最终掩码。我们在六个具有不同土地覆盖类型(如森林、城市、农田、稀树草原和灌木丛)代表性的热带地点测试了STI-ACSS。在每个站点,我们参考云/阴影的手动掩模来评估STI-ACSS的性能,并将其与四种最先进的掩模函数(Fmask)、自动时间序列分析(ATSA)、迭代雾霾优化转换(IHOT)和默认的PlanetScope质量控制层进行比较。我们的结果表明,在所有站点中,STI-ACSS 1)具有最高的平均总体精度(98.03%),2)对云产生的平均生产者精度为95.53%,对云阴影产生的平均生产者精度为89.48%,3)对站点和季节都具有健壮性。这些结果表明,在热带地区使用STI-ACSS对PlanetScope卫星进行云/阴影检测的有效性,并有可能扩展到其他光谱波段有限的卫星传感器。
1.概述
本研究的目的是为PlanetScope卫星影像的云和云影自动筛选开发一种有效而准确的方法。鉴于PlanetScope中云和云阴影检测的挑战,我们强调了这项工作的三个主要创新点如下。
- 首先,我们将空间和时间信息结合起来,以弥补PlanetScope有限的光谱波段数量;
- 其次,我们开发了一种新的自适应阈值方法来克服不同立方体卫星获取的PlanetScope时间序列图像之间的辐射不一致性;
- 第三,我们整合了两步微调,即形态学处理和基于对象的云和云阴影匹配,以减少高空间分辨率图像生成的云/阴影掩码中常见的随机/遗漏/commission错误。
我们将这种方法命名为自动云影筛选(STI-ACSS)时空集成方法。通过这种方法,我们希望能有效地筛选PlanetScope影像中的云和云影,减少观测的不确定性,用于精细尺度的热带陆面监测。为了证明这一概念,我们将重点放在热带多云地区的六个地点,这些地点包括主要的热带土地覆盖类型,年降水量的梯度很大,云覆盖率的百分比范围很广。
3.方法
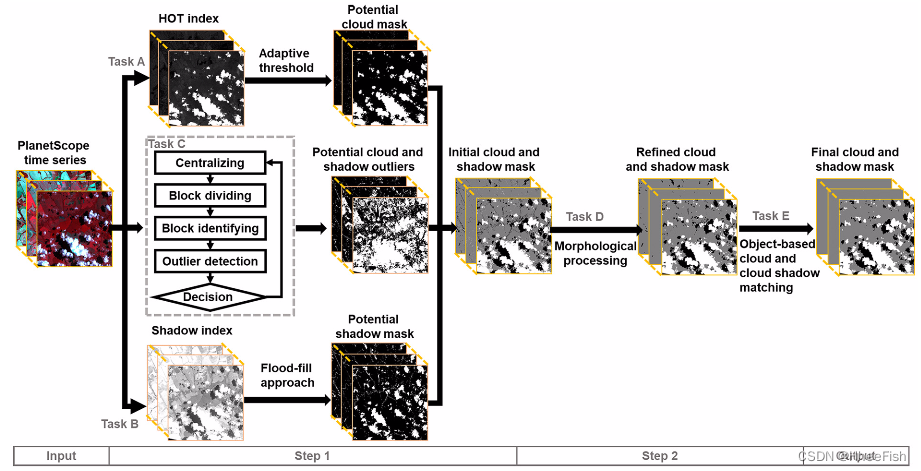
图2所示。自动云影筛选(STI-ACSS)方法的时空整合方法流程图。它包括由五个任务组成的两个关键步骤(A-E,更多细节见3.1-3.2节)。
步骤1:将基于云和阴影指数的单幅图像方法(Task A和B)与基于多时间的迭代离群点检测方法(Task C)集成,生成初始云和阴影掩模;
步骤2:通过形态学处理执行第一轮微调(任务D),通过基于对象的云和云阴影匹配方法(任务E)对初始云和阴影掩码进行第二轮微调。
这样,就生成了最终的云遮罩和阴影遮罩
提出的STI-ACSS使用由五个任务(a - e)组成的两个主要步骤来实现对PlanetScope图像时间序列队列中的云和云阴影的有效筛选(图2)。在步骤1中,通过结合基于单幅图像的(任务a和B)和基于多时间的(任务C)云/云阴影筛选算法,为时间序列中的每个图像生成初始云和阴影掩码。任务A和B分别依赖于雾霾优化变换(HOT;基于Zhang等人,2002)的云指数和flood-fill变换方法(Soille, 1999)对每一张图像的阴影指数进行处理。任务C使用一种新的基于多时间的云和云阴影筛选算法来执行,其中我们开发了一种迭代程序来识别反射异常值,这些异常值超过来自整个图像时间序列的一对统计百分位。在步骤2中,使用形态学处理进一步细化推导出的初始云和阴影掩模(Soille, 1999;朱等,2015;任务D)和基于对象的云和云阴影匹配(Zhu和Woodcock, 2012;任务E),去除“盐和胡椒的噪音”,并纠正低估或高估的云和云阴影。下面描述了每个Task的详细信息
3.1. 步骤1:生成初始的云和阴影蒙版
3.1.1.基于单幅图像的云检测(任务A)
在本节中,我们开发了一个自适应阈值,用HOT指数(一种常用的用于区分云和清晰像素的云指数)筛选出候选云像素(Zhang et al., 2002;朱和海尔默,2018;Zhu和Woodcock, 2012)。HOT的设计基于这样一个事实:无论土地覆盖类型如何,晴空像素的蓝色和红色波段都高度相关,在蓝色和红色二维(2d)空间中紧密遵循一条线性回归线(同步称为“晴空线”)(Zhang et al., 2002)。相比之下**,在这个二维空间中被云/雾污染的像素显示出明显偏离“清晰线”**(更多细节见Zhang等人,2002)。根据这个想法,HOT索引被计算为像素到清晰线的垂直距离:

Bblue和Bred是PlanetScope像素的蓝色和红色的反射率。a和b分别为“clear-line”的斜率和截距。为了获得“clear-line”的a和b,我们应用了一种基于bin的方法来自动计算任何给定PlanetScope图像的每像素HOT索引(更多细节见Zhu和Helmer, 2018)
如果云像素的HOT值通常大于晴空像素,如果它的HOT值(HOTx)大于给定的阈值(’ HOT阈值’=THOT),我们将图像像素(x)归类为云像素;否则,我们将其归类为清晰像素。像素x处的潜在云掩码(pCMx)可计算为

在这里,我们提出了一种自适应的方法来确定每个PlanetScope图像的THOT,考虑到它可能随土地覆盖类型、云覆盖百分比和植物物候变化。该方法包括四个步骤
- 1)生成潜在的HOT阈值:为此,计算每个PlanetScope图像在2.5% (HOT2.5)和97.5% (HOT97.5)处的HOT指数。在HOT2.5和HOT97.5之间,还将该范围等分N个区间(如本研究中的50个区间),生成一系列潜在的HOT阈值(Ti, i∈[1,N])。
- 2)根据公式2,使用Ti记录每个THOT对应生成的pCM像素数(ni)。
- 3)在二维空间上显示所有的(Ti, ni)对,从而得到一个单调递减曲线(图3)。
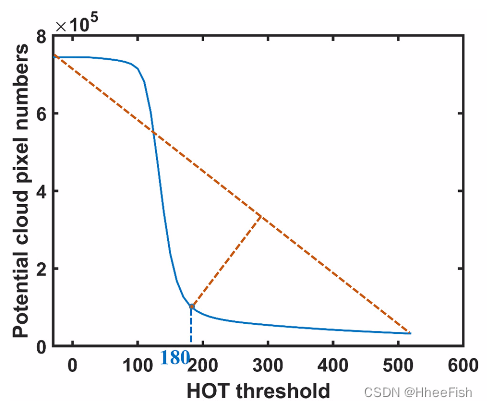
图3所示。示例演示了如何使用自适应方法确定区分云像素与无云像素的最佳阈值(任务A,图2)。蓝线显示了雾霾优化转换(HOT)值大于给定HOT阈值(x轴)的潜在云像素(Y轴)的数量。棕色虚线连接这条曲线的起点和终点。最佳阈值被确定为l型“角”,它与棕色虚线的距离最大(例如,在本例中,Euc-plantation site在2018年4月06日为180)。(关于图中关于颜色的解释,读者可参考本文的网页版本。)
- 4)确定最佳的HOT阈值:由于之前已经证明了上述推导出的二维曲线(Hansen, 1992)的L型“corner”是云像素与无云像素的最佳分离(Liu and Liu, 2013),在这里我们自动确定L型“corner”,以推导出最佳的HOT阈值。具体来说,我们连接了曲线的端点(TN, nN)和起点(T1, n1),并计算了每个点(Ti, ni)到连接线的垂直距离。然后确定距离最大的点为L型“corner”(图3),取其阈值作为最优HOT阈值。值得注意的是,这里提出的识别L型“corner”的方法只是一个解,有兴趣的读者可以参考Hansen和Oleary(1993)了解其他解。
3.1.2.基于单幅图像的云阴影检测(任务B)
为了筛选出PlanetScope图像所有候选云阴影像素,我们首先计算阴影指数(SI),然后对导出的SI图像应用flood-fill填充方法(Soille, 1999)。SI是用公式3推导出来的,这与Luo等人(2008)相似。

Bred和BNIR分别为PlanetScope像素在红色和近红外波段的反射率,meanred和meanNIR分别为整个图像的红色和近红外波段的平均值。
由于云阴影像素的SI值通常比周围环境低得多(图2),我们随后应用了一种常用的flood-fill转换方法(Soille,
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2191
2191

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









