






矩阵的奇异值分解是矩阵的一种分解方式。我们可以利用矩阵的奇异值分解,提取矩阵的主要信息,从而通过比原矩阵少的数据量,来还原跟原矩阵差不多的信息。在python的numpy库中跟我们提供了svd分解的函数:
U, S, VT = numpy.linalg.svd(matrix)该函数返回2个矩阵U、VT(注意,这个返回的VT是转置的以行向量保存的特征向量,它也可以用于PCA和LDA的分解,另外,eig_vals, eig_vecs = numpy.linalg.eig(matrix),返回的eig_vecs是未转置的列向量保存的特征向量)和1个1维的奇异值向量,这是因为奇异值矩阵是一个对角矩阵,除了对角元素外其他元素都为0,转为向量可以节省空间。我们可以通过观察奇异值向量,选取前k个奇异值(一般这k个奇异值之和占所有奇异值之和的90%)来还原原矩阵,还原方式如下:
import numpy as np
sig = np.eye(k) * S[: k] # 将奇异值向量的前k个奇异值转为对角矩阵
# 前k个奇异值对应矩阵U的前k列,对应矩阵VT的前k行,可以结合下图观察
new_matrix= np.dot(np.dot(U[:, :k], sig), VT[:k, :]) 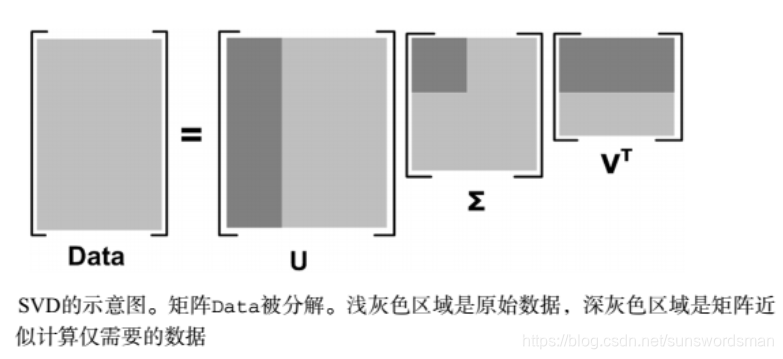
利用SVD可以进行图像压缩、杂讯过滤和数据分析。
下面是SVD进图像进行压缩的实践:
import numpy as np
import matplotlib.pyplot as plt
import os
im = plt.imread('D:\\100.jpg')
# print('origin_image shape:', im.shape)
if not os.path.exists('D:\\svd'):
os.mkdir("D:\\svd")
# img = np.zeros(shape=im.shape, dtype='uint8')
for r in range(1,100):
svd_image = []
for ch in range(3):
im_ch = im[:,:,ch]
U,D,VT = np.linalg.svd(im_ch)
imx = np.matmul(np.matmul(U[:,:r],np.diag(D[:r])),VT[:r,:])
svd_image.append(imx.astype('uint8'))
# img[:,:,ch] = imx.astype('uint8')
img = np.stack((svd_image[0], svd_image[1], svd_image[2]), 2)
# print('svd_image shape:',img.shape)
plt.figure(figsize=(800/96,1280/96), dpi=96) #设置图像在大小和dpi
plt.imshow(img)
plt.axis('off')
plt.savefig('D:\\svd\%02d.jpg'%r)网上随便找的原图(608K):

取前50个奇异值的压缩效果:

取前100个奇异值的压缩效果:

取前300个奇异值的压缩效果:

100个和300个奇异值的压缩效果已相差无几了
一些连续的压缩效果(可以看到从前2个奇异值开始就可以图像的轮廓了,前10个基本就捕获了图像的大部分信息了):
















 2748
2748

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









