







SVM概览
http://blog.csdn.net/liukun321/article/details/41574617
简单来说,SVM就是用于区分不同的类型(车牌、非车牌)。SVM的训练数据既有特征又有标签,通过训练,让机器可以自己找到特征和标签之间的联系,在面对只有特征没有标签的数据时,可以判断出标签。属于机器学习中的监督学习。
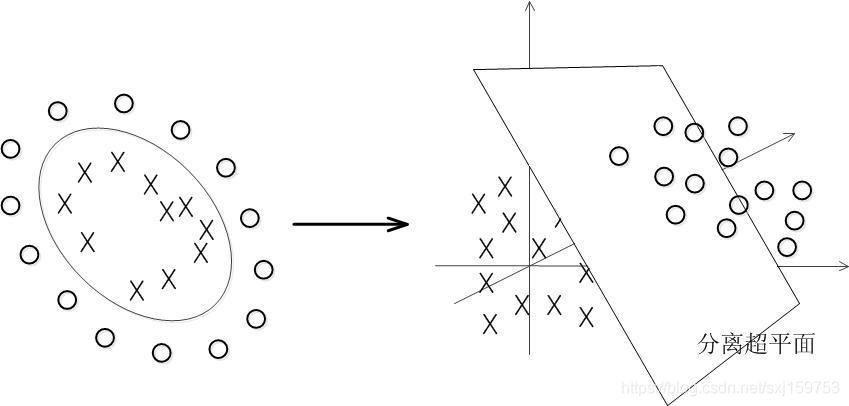
核函数: 用于将不同类型进行提维(需要一点空间想象力)
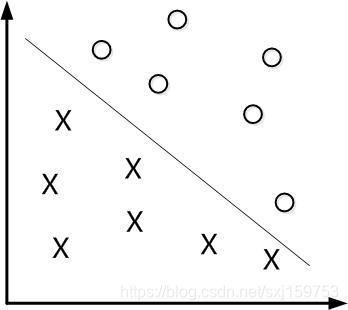
svm线性可分:
svm线性不可分:
SVM训练流程:
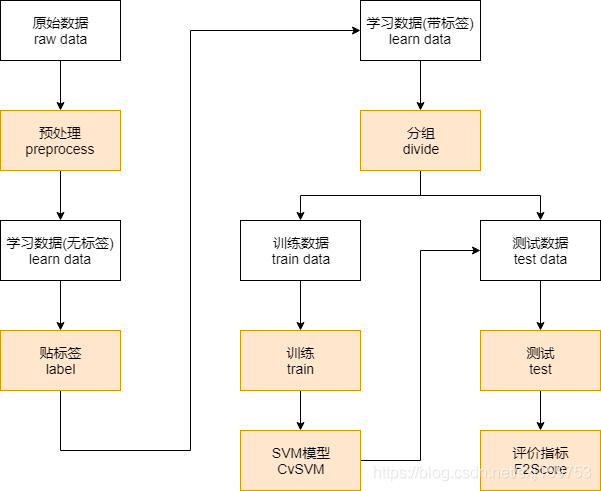
预处理 (原始数据->学习数据(无标签)
预处理步骤主要处理的是原始数据到学习数据的转换过程。(真正的车牌图片和不是车牌的图片)
打标签 (学习数据(无标签)->学习数据(带标签))
将未贴标签的数据转化为贴过标签的学习数据。
分组(学习数据(带标签)->分组数据)
将数据分为训练集和测试集
训练(训练数据->模型)
加载待训练的车牌数据和非车牌数据,合并数据,配置SVM模型的训练参数进行训练。
HOG特征(Histogram of Oriented Gradient)
局部归一化的梯度方向直方图,是一种对图像局部重叠区域的密集型描述符, 它通过计算局部区域的梯度方向直方图来构成特征。
参数1(检测窗口)的宽- 参数2(块大小)的宽 结果与参数3(块滑动增量)的余数要为0 高也一样
参数4是胞元大小,参数5是梯度方向
HOGDescriptor hog(Size(128, 64), Size(16, 16), Size(8, 8), Size(8, 8), 3);
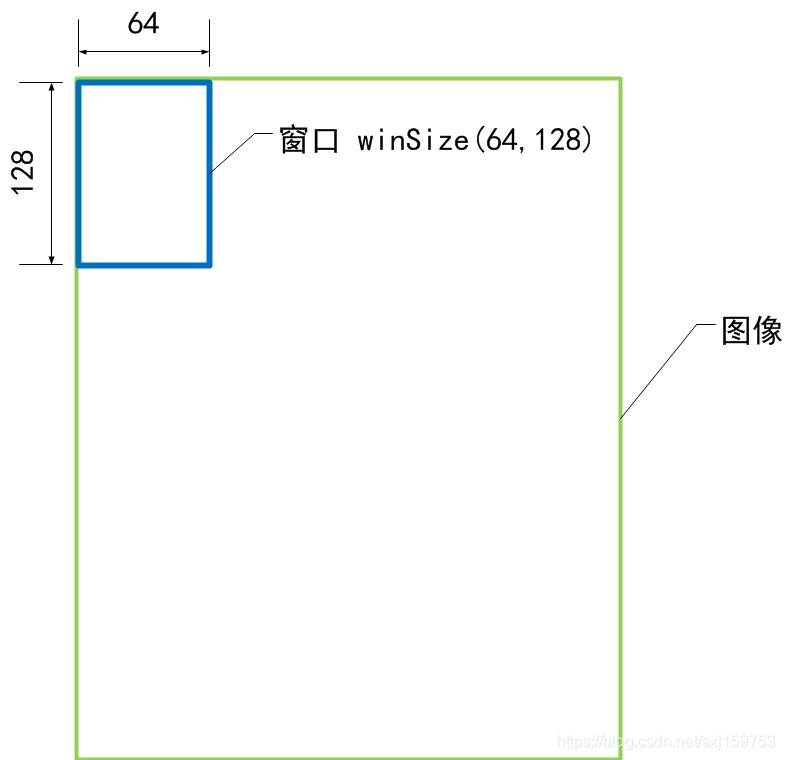
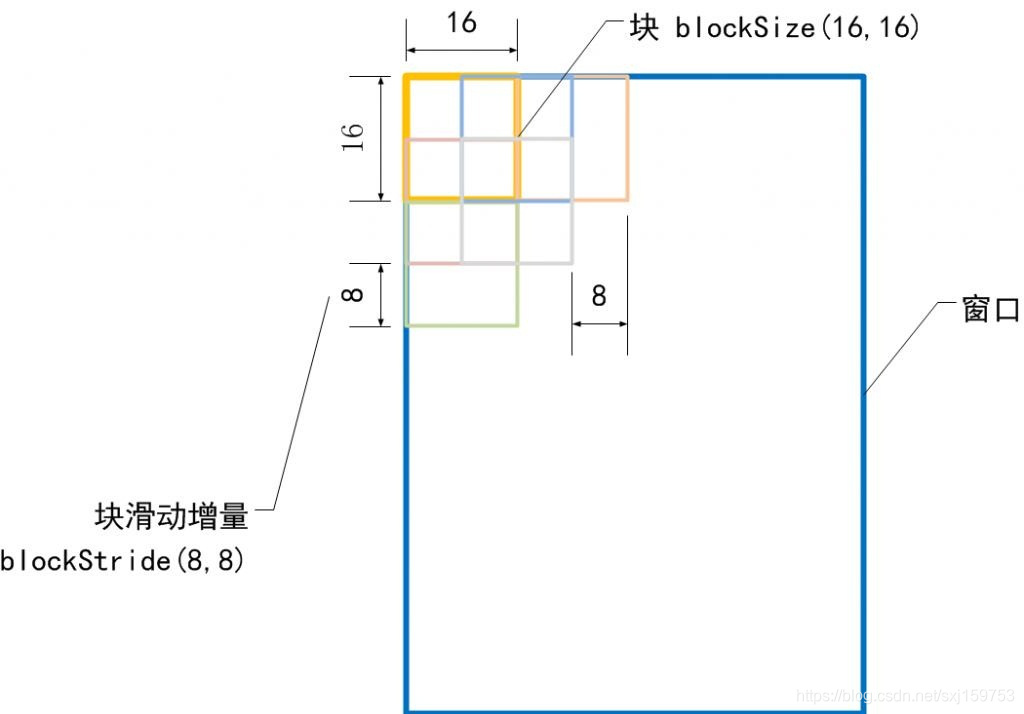
检测窗口被分为:((128-16)/8+1)*((64-16)/8+1)=105个块(Block);
一个Block有4个胞元(Cell);
一个Cell的Hog描述子向量的长度是9;
统计梯度直方图特征,就是将梯度方向(0-360)划分为x个区间,将图像化为16x16的若干个窗口,每个窗口又划分为x个block,每个block再化为4个cell(8x8)。对每一个cell,算出每一像素点的梯度方向,按梯度方向增加对应bin的值,最终综合N个cell的梯度直方图组成特征。
简单来说,车牌的边缘与内部文字组成的一组信息(在边缘和角点的梯度值是很大的,边缘和角点包含了很多物体的形状信息),HOG就是抽取这些信息组成一个直方图。
HOG : 梯度方向弱化光照的影响,适合捕获轮廓。
LBP : 中心像素的LBP值反映了该像素周围区域的纹理信息。
目的
通过之前的了解,我们找到了一些车牌的图片。
通过svm,找到最可能是车牌的图片。
svm = SVM::load(svm_model);
svmHog = new HOGDescriptor(Size(128, 64), Size(16, 16), Size(8, 8), Size(8, 8), 3);
int SvmPredict::doPredict(vector<Mat> candi_plates, Mat& final_plate)
{
//遍历判断
Mat plate;
float score;
int index = -1;
float minScore = FLT_MAX;
for (int i = 0; i < candi_plates.size(); i++)
{
plate = candi_plates[i];
//获取车牌图片的特征:HOG
//预处理
Mat gray;
cvtColor(plate, gray, COLOR_BGR2GRAY);
//二值化
Mat shold;
//THRESH_OTSU 大律法 自适应阈值
//THRESH_BINARY 正二值化
//THRESH_BINARY_INV 反二值化
threshold(gray, shold, 0, 255, THRESH_OTSU + THRESH_BINARY);
Mat features;
getHogFeatures(svmHog, shold, features);
Mat sample = features.reshape(1, 1);
score = svm->predict(sample, noArray(), StatModel::Flags::RAW_OUTPUT);
printf("svm候选车牌%d评分是:%f\n", i, score);
//score越小越可能是车牌
if (score < minScore) {
minScore = score;
index = i;
}
gray.release();
shold.release();
features.release();
sample.release();
}
if (index >= 0) {
final_plate = candi_plates[index].clone();
imshow("svm评测最终车牌", final_plate);
}
return index;
}
void SvmPredict::getHogFeatures(HOGDescriptor* hog, Mat src, Mat& dst) {
//归一化处理
Mat trainImg = Mat(hog->winSize, CV_32S);
resize(src, trainImg, hog->winSize);
//计算特征
vector<float> desc;
hog->compute(trainImg, desc, hog->winSize);
Mat feature(desc);
feature.copyTo(dst);
feature.release();
trainImg.release();
}














 213
213











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









