






文章目录
一、基于EXTI按键中断led亮灭
1、外部中断基本结构

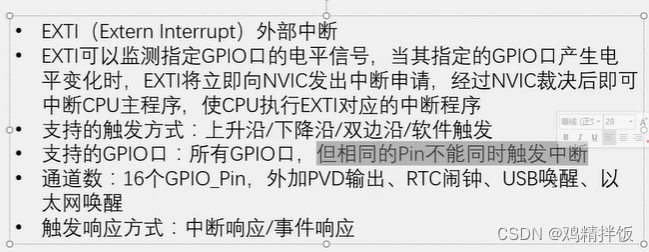
2、外部中断简介
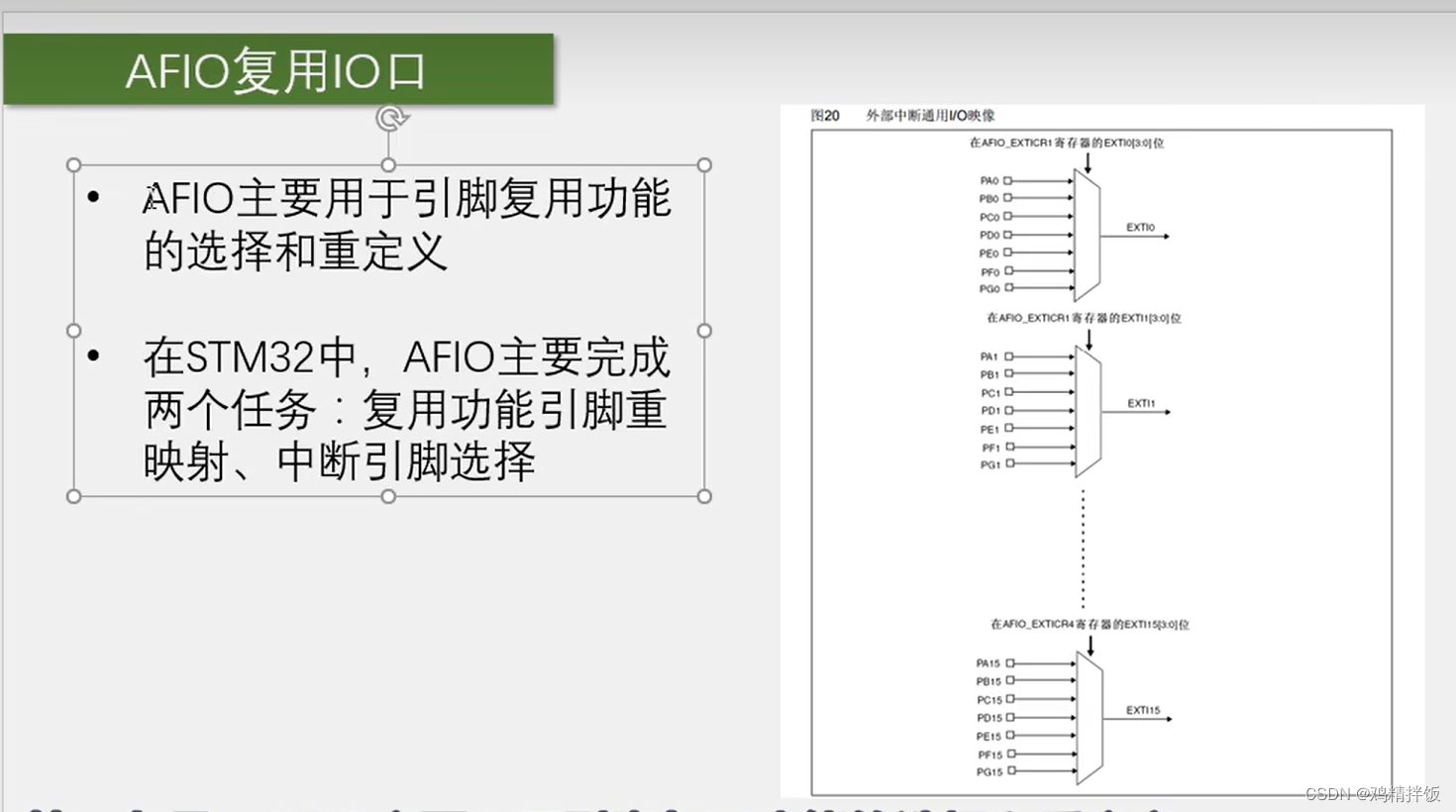
3、 AFIO
4、EXTI内部框图

1、20根输入线进来。
2、 首先选择上升沿或者下降沿触发,也可不做选择,选择软件触发中断
3、分为两路,上面为中断触发,下面为事件触发
4、触发中断的话,先置一个请求挂起寄存器,可以通过读取该寄存器判断是哪个通道触发的中断
5、中断屏蔽寄存器置1,另一个输入无论是什么都直接输出。若置0,只能输出0
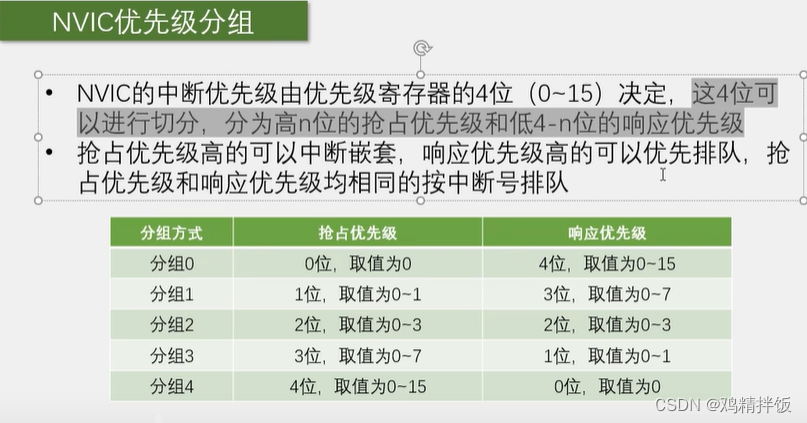
5、NVIC基本结构

通过以上的基本简介,我们可以知道要想触发中断,就要
1、配置IO口以及选择对应IO中断引脚(开启io口时钟以及AFIO时钟)
2、EXTI控制器配置
3、NVIC配置
6、代码(有详细注释)
中断部分
#include "stm32f10x.h" // Device header
#include "led.h"
void exti_key_Init()
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);//B端口外设时钟开启
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE); //AFIO时钟
//配置GPIO
GPIO_InitTypeDef GPIO_Initstructure;
GPIO_Initstructure.GPIO_Mode=GPIO_Mode_IPU;//上拉输入模式,默认为高电平,所以按键一端接地,一端接IO口
GPIO_Initstructure.GPIO_Pin=GPIO_Pin_1;//PB1
GPIO_Initstructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_Initstructure);
//AFIO配置
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB,GPIO_PinSource1); //选择B作为外部中断源,EXTI1号中断线路
//EXTI配置
EXTI_InitTypeDef EXTI_Initstructrue;
EXTI_Initstructrue.EXTI_Line=EXTI_Line1;//中断线路,;
EXTI_Initstructrue.EXTI_LineCmd=ENABLE;//使能
EXTI_Initstructrue.EXTI_Mode=EXTI_Mode_Interrupt; //外部中断模式,分为中断和事件模式
EXTI_Initstructrue.EXTI_Trigger=EXTI_Trigger_Falling; //触发信号方式 ,下降沿触发
EXTI_Init(&EXTI_Initstructrue);
//NVIC配置
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//配置抢占优先级,响应优先级的大小
NVIC_InitTypeDef NVIC_Initstructrue;
NVIC_Initstructrue.NVIC_IRQChannel=EXTI1_IRQn;//中断线路,这里需要注意EXTI5~9与EXTI10~15
NVIC_Initstructrue.NVIC_IRQChannelCmd=ENABLE;
NVIC_Initstructrue.NVIC_IRQChannelPreemptionPriority=1;//抢占优先级配置
NVIC_Initstructrue.NVIC_IRQChannelSubPriority=1;//响应优先级配置
NVIC_Init(&NVIC_Initstructrue);
}
led灯端口初始化
#include "stm32f10x.h" // Device header
void LED_Init()
{ RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);//开启A口时钟
GPIO_InitTypeDef GPIO_InitStructure;//GPIO结构体
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP;//推挽输出模式
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_0;//选择A口的第0个引脚
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;//输出速度选择50mhz;
GPIO_Init(GPIOA,&GPIO_InitStructure);//读取GPIO结构体参数,最后写入GPIO配置寄存器
}
主函数
#include "stm32f10x.h" // Device header
#include "exti_key.h"
#include "led.h"
//操作IO口的三个步骤
//1、使用RCC开启GPIO时钟
//2、使用GPIO_Init函数初始化GPIO
//3、使用输出或输入函数控制GPIO口
uint8_t led=1;
int main()
{
LED_Init();//led灯端口初始化函数
exti_key_Init();//按键中断初始化函数
while(1)
{
}
}
//中断函数,当按键按下触发
void EXTI1_IRQHandler()
{
if(EXTI_GetFlagStatus(EXTI_Line1)==SET)//中断标志位判断,判断是不是1号线路进来
{
led=~led;
if(led==1)
{
GPIO_WriteBit(GPIOA,GPIO_Pin_0,Bit_SET);
}
else
GPIO_WriteBit(GPIOA,GPIO_Pin_0,Bit_RESET);
EXTI_ClearITPendingBit(EXTI_Line1);//清除中断标志位
}
}
二、串口中断
1、目的1
当stm32接收到1个字符“s”时,停止持续发送“hello windows!”; 当接收到1个字符“t”时,持续发送“hello windows!”
从第一部分,我们可以了解到,串口中断并不需要通过EXTI控制器。串口中断是直接控制NVIC来实现
代码
中断部分
#include "stm32f10x.h" // Device header
#include <stdio.h>
#include <stdarg.h>
#include "string.h" //使用strcmp头文件
uint8_t Serial_RxFlag;
uint8_t receiveFlag=1;
/**
* 函 数:串口初始化
* 参 数:无
* 返 回 值:无
*/
void Serial_Init(void)
{
/*开启时钟*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE); //开启USART1的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟
/*GPIOA_9初始化*/
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;//将PA9引脚初始化为复用推挽输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
//GPIOA_10
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//上拉输入模式
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/*USART初始化*/
USART_InitTypeDef USART_InitStructure; //定义结构体变量
USART_InitStructure.USART_BaudRate = 9600; //波特率
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //硬件流控制,不需要
USART_InitStructure.USART_Mode = USART_Mode_Tx|USART_Mode_Rx; //模式,选择收发模式
USART_InitStructure.USART_Parity = USART_Parity_No; //奇偶校验,不需要
USART_InitStructure.USART_StopBits = USART_StopBits_1; //停止位,选择1位
USART_InitStructure.USART_WordLength = USART_WordLength_8b; //字长,选择8位
USART_Init(USART1, &USART_InitStructure); //将结构体变量交给USART_Init,配置USART1
/*USART使能*/
USART_Cmd(USART1, ENABLE); //使能USART1,串口开始运行
USART_ITConfig(USART1,USART_IT_RXNE,ENABLE);//启用USART1,查询中断标志位RXNE,一旦查询到置一,申请终端
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//中断优先级分组
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel=USART1_IRQn;//NVIC通道
NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=1;//高优先级
NVIC_InitStructure.NVIC_IRQChannelSubPriority=1;//低优先级
NVIC_Init(&NVIC_InitStructure);
}
/**
* 函 数:串口发送一个字节
* 参 数:Byte 要发送的一个字节
* 返 回 值:无
*/
void Serial_SendByte(uint8_t Byte)
{
USART_SendData(USART1, Byte); //将字节数据写入数据寄存器,写入后USART自动生成时序波形
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET); //等待发送完成
/*下次写入数据寄存器会自动清除发送完成标志位,故此循环后,无需清除标志位*/
}
/**
* 函 数:串口发送一个数组
* 参 数:Array 要发送数组的首地址
* 参 数:Length 要发送数组的长度
* 返 回 值:无
*/
void Serial_SendArray(uint8_t *Array,uint16_t Length)//发送数组
{
uint16_t i;
for(i=0;i<Length;i++)
{
Serial_SendByte(Array[i]);
}
}
/**
* 函 数:串口发送一个字符串
* 参 数:String 要发送字符串的首地址
* 返 回 值:无
*/
void Serial_SendString(char *string)
{
uint8_t i;
for(i=0;string[i]!='\0';i++)
{
Serial_SendByte(string[i]);
}
}
/**
* 函 数:次方函数(内部使用)
* 返 回 值:返回值等于X的Y次方
*/
uint32_t Serial_Pow(uint32_t X, uint32_t Y)
{
uint32_t Result = 1; //设置结果初值为1
while (Y --) //执行Y次
{
Result *= X; //将X累乘到结果
}
return Result;
}
/**
* 函 数:串口发送数字
* 参 数:Number 要发送的数字,范围:0~4294967295
* 参 数:Length 要发送数字的长度,范围:0~10
* 返 回 值:无
*/
void Serial_SendNumber(uint32_t Number,uint8_t Length)
{
uint8_t i;
for(i=0;i<Length;i++)
{
Serial_SendByte(Number/Serial_Pow(10,Length-i-1)%10+'0');//由十进制的高位到低位依次发送
//加上'0'就转换为ascll码的类型,从ascll码中字符0的位置开始算,也可以改为0x30.
}
}
/**
* 函 数:使用printf需要重定向的底层函数
* 参 数:保持原始格式即可,无需变动
* 返 回 值:保持原始格式即可,无需变动
*/ //将printf的底层重定向到自己的发送字节函数
//什么是重定向?重定向是指将fputc里面的输出指向目标设备。因printf函数调用了fputc,
//而fputc输出有默认指向的目标,且不同库中的fputc输出指向不同,所以需要重写fputc
int fputc(int ch,FILE *f) //printf重定向,为串口
{
Serial_SendByte(ch);
return ch;
}
/**
* 函 数:自己封装的prinf函数
* 参 数:format 格式化字符串
* 参 数:... 可变的参数列表
* 返 回 值:无
*/
void Serial_Printf(char *format, ...)
{
char string[100];
va_list arg; //参数列表变量
va_start(arg,format); //
vsprintf(string,format,arg);
va_end(arg);//释放参数表
Serial_SendString(string);//发送string
}
uint8_t Serial_GetRxFlag()
{
if(Serial_RxFlag==1)
{
Serial_RxFlag=0;
return 1;
}
return 0;
}
// 发送s,t
void USART1_IRQHandler()//串口中断函数
{
if(USART_GetFlagStatus(USART1,USART_IT_RXNE)==SET)//串口接收标志位
{
uint8_t temp=USART_ReceiveData(USART1);
if(temp=='s')
{
receiveFlag=0;
}
if(temp=='t')
{
receiveFlag=1;
}
USART_ClearITPendingBit(USART1,USART_IT_RXNE);//标志位清零
}
}
主函数
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "LED.h"
#include "Serial.h"
#include "OLED.h"
//操作IO口的三个步骤
//1、使用RCC开启GPIO时钟
//2、使用GPIO_Init函数初始化GPIO
//3、使用输出或输入函数控制GPIO口
extern uint8_t receiveFlag;
int main()
{
OLED_Init();
Serial_Init();
while(1)
{
if(receiveFlag==1)
{
printf("hello windows!\r\n");
OLED_ShowNum(1,1,3,2);;//OLED显示屏函数,可根据自己需求来判断是否要添加,我主要用来更清楚的观察串口是否进入中断等
}
Delay_ms(500);延时函数
if(receiveFlag==0)
{
OLED_ShowNum(1,1,2,2);
}
Delay_ms(500);
}
}
延时函数
#include "stm32f10x.h"
/**
* @brief 微秒级延时
* @param xus 延时时长,范围:0~233015
* @retval 无
*/
void Delay_us(uint32_t xus)
{
SysTick->LOAD = 72 * xus; //设置定时器重装值
SysTick->VAL = 0x00; //清空当前计数值
SysTick->CTRL = 0x00000005; //设置时钟源为HCLK,启动定时器
while(!(SysTick->CTRL & 0x00010000)); //等待计数到0
SysTick->CTRL = 0x00000004; //关闭定时器
}
/**
* @brief 毫秒级延时
* @param xms 延时时长,范围:0~4294967295
* @retval 无
*/
void Delay_ms(uint32_t xms)
{
while(xms--)
{
Delay_us(1000);
}
}
/**
* @brief 秒级延时
* @param xs 延时时长,范围:0~4294967295
* @retval 无
*/
void Delay_s(uint32_t xs)
{
while(xs--)
{
Delay_ms(1000);
}
}
效果图
2、目的2
当stm32接收到字符“stop stm32!”时,停止持续发送“hello windows!”; 当接收到字符“go stm32!”时,持续发送“hello windows!”
与上面不同的是,这里接收需要接收一个字符串,所以就需要写接收字符串函数
代码
#include "stm32f10x.h" // Device header
#include <stdio.h>
#include <stdarg.h>
#include "string.h" //使用strcmp头文件
uint8_t Serial_RxFlag;
uint8_t receiveFlag=1;
/**
* 函 数:串口初始化
* 参 数:无
* 返 回 值:无
*/
void Serial_Init(void)
{
/*开启时钟*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE); //开启USART1的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟
/*GPIOA_9初始化*/
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA9引脚初始化为复用推挽输出
//GPIOA_10
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//上拉输入模式
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/*USART初始化*/
USART_InitTypeDef USART_InitStructure; //定义结构体变量
USART_InitStructure.USART_BaudRate = 9600; //波特率
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //硬件流控制,不需要
USART_InitStructure.USART_Mode = USART_Mode_Tx|USART_Mode_Rx; //模式,选择收发模式
USART_InitStructure.USART_Parity = USART_Parity_No; //奇偶校验,不需要
USART_InitStructure.USART_StopBits = USART_StopBits_1; //停止位,选择1位
USART_InitStructure.USART_WordLength = USART_WordLength_8b; //字长,选择8位
USART_Init(USART1, &USART_InitStructure); //将结构体变量交给USART_Init,配置USART1
/*USART使能*/
USART_Cmd(USART1, ENABLE); //使能USART1,串口开始运行
USART_ITConfig(USART1,USART_IT_RXNE,ENABLE);//启用USART1,查询中断标志位RXNE,一旦查询到置一,申请终端
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//中断优先级分组
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel=USART1_IRQn;//NVIC通道
NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=1;//高优先级
NVIC_InitStructure.NVIC_IRQChannelSubPriority=1;//低优先级
NVIC_Init(&NVIC_InitStructure);
}
/**
* 函 数:串口发送一个字节
* 参 数:Byte 要发送的一个字节
* 返 回 值:无
*/
void Serial_SendByte(uint8_t Byte)
{
USART_SendData(USART1, Byte); //将字节数据写入数据寄存器,写入后USART自动生成时序波形
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET); //等待发送完成
/*下次写入数据寄存器会自动清除发送完成标志位,故此循环后,无需清除标志位*/
}
/**
* 函 数:串口发送一个数组
* 参 数:Array 要发送数组的首地址
* 参 数:Length 要发送数组的长度
* 返 回 值:无
*/
void Serial_SendArray(uint8_t *Array,uint16_t Length)//发送数组
{
uint16_t i;
for(i=0;i<Length;i++)
{
Serial_SendByte(Array[i]);
}
}
/**
* 函 数:串口发送一个字符串
* 参 数:String 要发送字符串的首地址
* 返 回 值:无
*/
void Serial_SendString(char *string)
{
uint8_t i;
for(i=0;string[i]!='\0';i++)
{
Serial_SendByte(string[i]);
}
}
/**
* 函 数:次方函数(内部使用)
* 返 回 值:返回值等于X的Y次方
*/
uint32_t Serial_Pow(uint32_t X, uint32_t Y)
{
uint32_t Result = 1; //设置结果初值为1
while (Y --) //执行Y次
{
Result *= X; //将X累乘到结果
}
return Result;
}
/**
* 函 数:串口发送数字
* 参 数:Number 要发送的数字,范围:0~4294967295
* 参 数:Length 要发送数字的长度,范围:0~10
* 返 回 值:无
*/
void Serial_SendNumber(uint32_t Number,uint8_t Length)
{
uint8_t i;
for(i=0;i<Length;i++)
{
Serial_SendByte(Number/Serial_Pow(10,Length-i-1)%10+'0');//由十进制的高位到低位依次发送
//加上'0'就转换为ascll码的类型,从ascll码中字符0的位置开始算,也可以改为0x30.
}
}
/**
* 函 数:使用printf需要重定向的底层函数
* 参 数:保持原始格式即可,无需变动
* 返 回 值:保持原始格式即可,无需变动
*/ //将printf的底层重定向到自己的发送字节函数
//什么是重定向?重定向是指将fputc里面的输出指向目标设备。因printf函数调用了fputc,
//而fputc输出有默认指向的目标,且不同库中的fputc输出指向不同,所以需要重写fputc
int fputc(int ch,FILE *f) //printf重定向,为串口
{
Serial_SendByte(ch);
return ch;
}
/**
* 函 数:自己封装的prinf函数
* 参 数:format 格式化字符串
* 参 数:... 可变的参数列表
* 返 回 值:无
*/
void Serial_Printf(char *format, ...)
{
char string[100];
va_list arg; //参数列表变量
va_start(arg,format); //
vsprintf(string,format,arg);
va_end(arg);//释放参数表
Serial_SendString(string);//发送string
}
uint8_t Serial_GetRxFlag()
{
if(Serial_RxFlag==1)
{
Serial_RxFlag=0;
return 1;
}
return 0;
}
//发送stop,go
void USART1_IRQHandler()//串口中断函数
{
uint8_t receive[100];
if(USART_GetFlagStatus(USART1,USART_IT_RXNE)==SET)
{
static uint8_t x=0;
uint8_t temp=USART_ReceiveData(USART1);
if(temp!='\n') //字符串接收函数
{receive[x]=temp;
x++;
}
receive[x]='\0';
if(strcmp((char*)receive,"stop stm32!")==0)
{
receiveFlag=0;
x=0;
}
else if(strcmp((char*)receive,"go stm32!")==0)
{
receiveFlag=1;
x=0;
}
USART_ClearITPendingBit(USART1,USART_IT_RXNE);
}
}
主函数与上面一个一致
效果图
三、总结
对中断有一个较浅的认识,复习了c语言中的strmp函数
参考:【STM32入门教程-2023版 细致讲解 中文字幕】 https://www.bilibili.com/video/BV1th411z7sn/?p=11&share_source=copy_web&vd_source=271598ff177b3c8edd9ca1213d38bde4















 4833
4833

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









