







物体在三维空间中的旋转变换操作通常可以通过三种不同的方式来表示:矩阵(Matrix)、欧拉角(Euler Angles)和四元数(Quaternion)。下面详细解释这三种表示方法。
矩阵(Matrix)
在三维空间中,旋转可以通过3x3的旋转矩阵来表示。旋转矩阵是正交矩阵,其行列式为1,且其转置等于其逆。旋转矩阵可以直接与向量相乘,得到旋转后的向量。这种表示方法直观,但计算量大,且有时不易理解其背后的旋转含义。
欧拉角(Euler Angles)
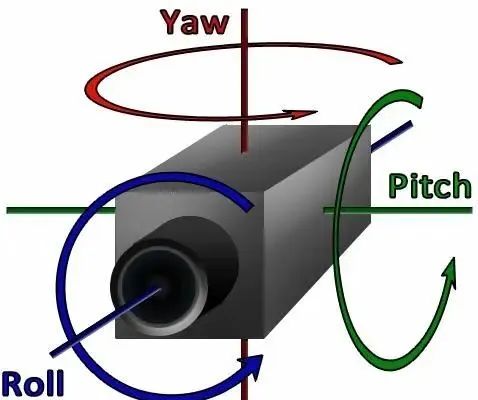
欧拉角是一种用三个角度来表示三维空间中任意旋转的方法。这三个角度通常对应于绕X轴、Y轴和Z轴的旋转。欧拉角易于理解和可视化,但在插值和组合旋转时可能会遇到万向锁(Gimbal Lock)的问题,即在某些情况下,旋转会失去一个自由度。
四元数(Quaternion)
四元数是一种复数形式的扩展,用于表示三维空间中的旋转。它由一个实部和三个虚部组成。四元数在表示旋转时具有一些优点,如避免万向锁问题,且在插值和组合旋转时表现良好。然而,四元数的理解和使用相对于欧拉角来说可能更复杂一些。
#define WNT#include <gp_Quaternion.hxx>void TestQuaternion(void){gp_Quaternion aQuaternion;// create quaternion by axis-angle.aQuaternion.SetVectorAndAngle(gp_Vec(1.0, 0.0, 0.0), M_PI_2);// convert quaternion to matrix.gp_Mat aMatrix = aQuaternion.GetMatrix();Standard_Real aYaw = 0.0;Standard_Real aPitch = 0.0;Standard_Real aRoll = 0.0;// convert quaternion to Euler Angles.aQuaternion.GetEulerAngles(gp_YawPitchRoll, aYaw, aPitch, aRoll);std::cout << "aYaw=" << aYaw << std::endl;std::cout << "aPitch=" << aPitch << std::endl;std::cout << "aRoll=" << aRoll << std::endl;}int main(int argc, char* argv[]){TestQuaternion();return 0;}
aYaw=0
aPitch=-0
aRoll=1.5708















 527
527











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









