







 本文详细介绍了双足式机器人的结构设计,包括采用模拟舵机模拟人类关节,使用铝合金材料制作结构件,以及硬件结构。还探讨了机器人控制器设计,选用Atmegal 6作为主控制板,并阐述了软件设计与调试过程中的舵机控制原理和工作流程。
本文详细介绍了双足式机器人的结构设计,包括采用模拟舵机模拟人类关节,使用铝合金材料制作结构件,以及硬件结构。还探讨了机器人控制器设计,选用Atmegal 6作为主控制板,并阐述了软件设计与调试过程中的舵机控制原理和工作流程。
双足步行机器人直立行走,其有着良好的自由度、动作灵活、自如、稳定。双足机器人是一种仿生类型的机器人,能够实现机器人的双足行走和相关动作。作为由机械控制的动态系统,双足机器人包含了丰富的动力学特性。在未来的生产生活中,类人型双足行走机器人可以帮助人类解决很多问题比如驮物、抢险等一系列危险或繁重的工作。
一、机器人的结构设计
机器人的关节
双足竞步机器人的结构类似于人类的双足,可以实现像人类一样行走。本机器人采取了使用模拟舵机代替人类关节,实现机器人的步态设计控制。使用舵机控制芯片控制各个关节的动作,从而实现了对步伐的大小、快慢、幅度的控制。
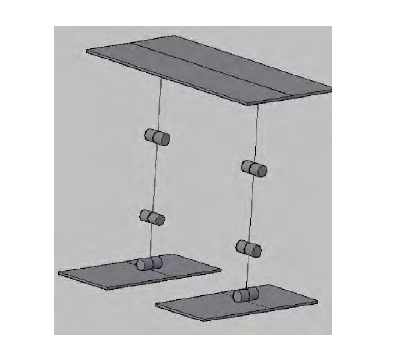
用铝合金或其他轻型高硬度材料来制作机器人的结构件,类似于人类的骨骼,从而来支撑机器人的整体。用轻型、有一定强度的材料(比如亚克力板)来制作机器人的顶板和脚板,模拟人类的胯部和脚掌从而来支持机器人的行走与稳定。因为行走是多关节配合的动作,机器人能独立完成行走或其他任务。作为类人形机器人,本机器人采用六个舵机分别代替两条腿的关节,其中一条腿的三个关节如图 1 所示。
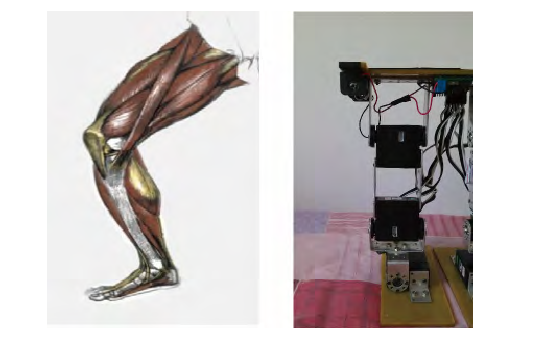
舵机:使用舵机来代替关节活动。舵机的好坏决定了机器人行走的质量。选择质量好,运行平稳,执
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











