







ICMP是(Internet Control Message Protocol)Internet控制 报文 协议。它是 TCP/IP协议族 的一个子协议,用于在IP 主机 、 路由 器之间传递控制消息。控制消息是指 网络通 不通、 主机 是否可达、 路由 是否可用等网络本身的消息
某一速率为100M的交换机有20个端口,其一个端口上连着一台笔记本电脑,此电脑从迅雷上下载一部1G的电影需要的时间可能是多久?
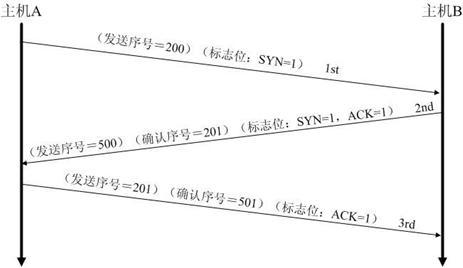
TCP/IP协议中,TCP协议提供可靠的连接服务,采用三次握手建立一个连接,如图1所示。
(1)第一次握手:建立连接时,客户端A发送SYN包(SYN=j)到服务器B,并进入SYN_SEND状态,等待服务器B确认。
(2)第二次握手:服务器B收到SYN包,必须确认客户A的SYN(ACK=j+1),同时自己也发送一个SYN包(SYN=k),即SYN+ACK包,此时服务器B进入SYN_RECV状态。
(3)第三次握手:客户端A收到服务器B的SYN+ACK包,向服务器B发送确认包ACK(ACK=k+1),此包发送完毕,客户端A和服务器B进入ESTABLISHED状态,完成三次握手。
完成三次握手,客户端与服务器开始传送数据。
确认号:其数值等于发送方的发送序号 +1(即接收方期望接收的下一个序列号)。
关闭连接:
由于TCP连接是全双工的,因此每个方向都必须单独进行关闭。这个原则是当一方完成它的数据发送任务后就能发送一个FIN来终止这个方向的连接。收到一个 FIN只意味着这一方向上没有数据流动,一个TCP连接在收到一个FIN后仍能发送数据。首先进行关闭的一方将执行主动关闭,而另一方执行被动关闭。
TCP的连接的拆除需要发送四个包,因此称为四次挥手(four-way handshake)。客户端或服务器均可主动发起挥手动作,在socket编程中,任何一方执行close()操作即可产生挥手操作。
(1)客户端A发送一个FIN,用来关闭客户A到服务器B的数据传送。
(2)服务器B收到这个FIN,它发回一个ACK,确认序号为收到的序号加1。和SYN一样,一个FIN将占用一个序号。
(3)服务器B关闭与客户端A的连接,发送一个FIN给客户端A。
(4)客户端A发回ACK报文确认,并将确认序号设置为收到序号加1。
TCP采用四次挥手关闭连接如图2所示。

图2 TCP四次挥手关闭连接
①TCP三次握手:


过程:首先Client端发送连接请求报文,Server段接受连接后ACK报文,并为这次连接分配资源,将客户端加入等待链接队列。Client端接收到ACK报文后也向Server段发生ACK报文,并分配资源,这样TCP连接就建立了。
②TCP四次挥手:


过程:中断连接端可以是Client端,也可以是Server端。
假设Client端发起中断连接请求,也就是发送FIN报文。Server端接到FIN报文后,意思是说"我Client端没有数据要发给你了",但是如果你还有数据没有发送完成,则不必急着关闭Socket,可以继续发送数据。所以你先发送ACK,"告诉Client端,你的请求我收到了,但是我还没准备好,请继续你等我的消息"。这个时候Client端就进入FIN_WAIT状态,继续等待Server端的FIN报文。当Server端确定数据已发送完成,则向Client端发送FIN报文,"告诉Client端,好了,我这边数据发完了,准备好关闭连接了"。Client端收到FIN报文后,"就知道可以关闭连接了,但是他还是不相信网络,怕Server端不知道要关闭,所以发送ACK后进入TIME_WAIT状态,如果Server端没有收到ACK则可以重传。“,Server端收到ACK后,"就知道可以断开连接了"。Client端等待了2MSL后依然没有收到,则证明Server端已正常关闭,那好,我Client端也可以关闭连接了。Ok,TCP连接就这样关闭了!
答:因为当Server端收到Client端的SYN连接请求报文后,可以直接发送SYN+ACK报文。其中ACK报文是用来应答的,SYN报文是用来同步的。但是关闭连接时,当Server端收到FIN报文时,很可能并不会立即关闭SOCKET,所以只能先回复一个ACK报文,告诉Client端,"你发的FIN报文我收到了"。只有等到我Server端所有的报文都发送完了,我才能发送FIN报文,因此不能一起发送。故需要四步握手。
答:因为当Server端收到Client端的SYN连接请求报文后,可以直接发送SYN+ACK报文。其中ACK报文是用来应答的,SYN报文是用来同步的。但是关闭连接时,当Server端收到FIN报文时,很可能并不会立即关闭SOCKET,所以只能先一个ACK报文,告诉Client端,"你发的FIN报文我收到了"。只有等到我Server端所有的报文都发送完了,我才能发送FIN报文,因此不能一起发送。故需要四步握手。















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









