






1,Linearly Separable Data 线性数据切分
考虑下面这张图,有红色数据和蓝色数据。在KNN 中,作为测试数据,要测量所有的训练数据的距离并取最小距离值。这要消耗大量的时间来计算距离和大量的内存来保存训练数据。考虑这些数据都是图像提供的,我们是否正的需要那么多?
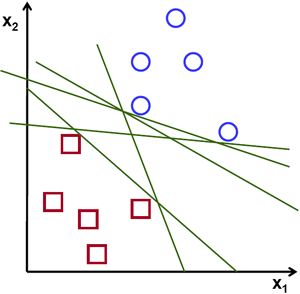
有另一种想法,找到一条线,f(x)= ax+by+c,把所有的数据分成两部分。当我们测试数据 X 来取代 它 ,如果 f(X)>0 则在蓝色组,否则在红色组。我们叫这条线为 决定边界(Decision Boundary)。这非常高效与节省内存。这样可以被直线分为两部分的数据,我们叫做线性可分(Linear Separable)。
下面的这张图,可以看到有许多这样的线。那一条才是我们要的?很直观,我们可以说里所有数据最远的那条就是我们要的。why?因为我们会被传入的数据干扰。数据不能影响分类精度。所以取最远的线有更强的抗干扰。SVM要做的事情就是找到这条离所有训练样本最大最小距离的直线。下图中的粗线通过图形的中间。
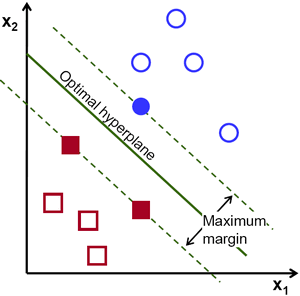
查找决定边界(Decision Boundary)需要所有的训练数据,需要么?当然不需要,只要靠近相反组的数据就够了。在本图中,有1个蓝色圆圈和两个红色方框,把它们叫做支持向量(Support Vectors),把通过他们所有的直线叫做支持平面(Support Planes),通过他们就足以找到决定边界,不用关系所有的数据,这样数据量减少了。
发生了什么,首先找到两个最能代表数据的超平面,比如蓝色数据的代表 ,而红色数据的代表
,而红色数据的代表 ,其中w是权重,
,其中w是权重,![w=[w_1, w_2,..., w_n]](http://opencv-python-tutroals.readthedocs.io/en/latest/_images/math/3f85eb04600da2130fdd6b9a08a01437b9e9646a.png) ,x是特征向量
,x是特征向量![x = [x_1,x_2,..., x_n]](http://opencv-python-tutroals.readthedocs.io/en/latest/_images/math/2191d7168dbb9daf9d46b22e43b81bb2e5f9c401.png) ,b0是偏移量。权重向量决定了决定边界的方向,偏移决定了位置。现在边界被定义在超平面的中间,所以表达式是
,b0是偏移量。权重向量决定了决定边界的方向,偏移决定了位置。现在边界被定义在超平面的中间,所以表达式是 。这到支持向量的最短距离就可以确定了,
。这到支持向量的最短距离就可以确定了, 。边缘是距离的两倍,我们要最大化这个边缘。比如我们得到一个新的函数L(w,b0)的一些约束,可以表示为:
。边缘是距离的两倍,我们要最大化这个边缘。比如我们得到一个新的函数L(w,b0)的一些约束,可以表示为:

ti是每一个分类,![t_i \in [-1,1]](http://opencv-python-tutroals.readthedocs.io/en/latest/_images/math/6513fc85b1daf439bb5a4ab1ea313ae91358bb41.png) .
.
2,Non-Linearly Separable Data。分线性分割数据。
有些数据是无法用一条直线分为两半。比如一维数据 -3<X<3, -1<Q<1,很明显,这是无法线性分割的。单有一些方法可以解决这类问题,我们可以映射数据集到一个函数上F(x)=X^2。得到X在9,Q在1,这样就线性可分了。
另外我们将一位数据转为二维数据,可以使用F(x,x^2)来映射这些数据。X 变成(3,9)和(-3,9),Q是(-1,1)和(1,1),这样就线性可分了。总之,在低维非线性可分可以增加维数变为线性可分。
通常,将d维空间上的点映射到D维空间(D>d)来改变线性可分。有个概念可以帮我实现低维空间里计算高维空间里的点运算。
可以用下面的例子来说明
2维空间里面的两点, 和
和 ,
, 是可以将二维空间的点映射到三维空间的映射函数,
是可以将二维空间的点映射到三维空间的映射函数,

定义一个核函数 ,可以在为二维空间执行两点间的点运算
,可以在为二维空间执行两点间的点运算

这就是说,一个三维空间的点运算可以用二维空间里点运算的平方来实现。
这也可以应用在高维空间。我们可以从低位空间计算自身在高维空间的特征。
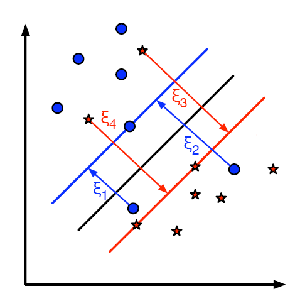
出了这些概念,还有一些分类的问题。所以找到最大边缘的边界是不够的。我们同样要考虑分类的错误,有时,它可能会找到一个边缘较小的边界,来减少了误分类。无论如何我们需要修正一下,我们需要最大边缘的边界也需要最小边缘的边界,最小化标准:

下面的图显示这个概念:
每个训练数据的样本定义为参数 ,是训练样本到‘决定地区’的距离。还没有分类的的数据在自己相应的超平面上,所以他们的距离是0.
,是训练样本到‘决定地区’的距离。还没有分类的的数据在自己相应的超平面上,所以他们的距离是0.
所以优化问题为:

如何选择参数C,很明显,这个问题的答案依赖于训练数据是如何分布的。
尽管没有一个常规答案,但是有利于我们总结一下规则:
1,大数值C提供的方案是提供最小边缘可以减少分类错误。这样产生错误分类就费劲了(不容易产生分类错误),优化后的目标需要较少的参数,分类错误是不允许的。
2,小数值C的方案是使用大只的边缘和较多的分类错误,这情况最小是不会考虑的很多组数量,这需要用大值边缘找到更多的超平面。















 4379
4379











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









