







更多优质内容,请关注公众号:智驾机器人技术前线
1.论文信息
-
标题:Kernel-based Planning and Imitation Learning Control for Flow Smoothing in Mixed Autonomy Traffic
-
作者:Zhe Fua∗, Arwa Alanqarya, Abdul Rahman Kreidieha, and Alexandre M. Bayen
-
作者单位:加利福尼亚大学
2.摘要
本文提出了一种新的架构,用于管理异构车队,旨在实现混合自主交通中的流量协调,展示了在不同感知范式中的鲁棒性。我们开发了一种基于核的规划控制器,能够在低带宽或高延迟网络中提供预见性协调。此外,我们采用了基于场景的优化技术来调整所提出控制器的参数,这在不同仿真场景中比网格搜索技术提供了性能改进。同时,我们的架构包括一个利用模仿学习的本地控制策略,特别将我们的基于核的规划控制器视为专家。这种独特的应用通过引入输入灵活性和车辆控制分散化,同时保持与专家潜在行为的一致性,弥合了局部感知和全局感知之间的差距。我们提出的架构被证明能够适应广泛的汽车平台,适应具有不同感知和执行水平的车辆,凸显了其在未来交通系统中广泛实施的潜力。
3.主要贡献
-
两层基于核的控制架构。首先,我们开发了一个两层纵向控制策略,使用基于核的规划,将交通的非局部状态映射到行为上,在混合自主设置中采用这些行为,可以同质化高速公路网络内的交通流。我们的控制器,根据宏观交通状态估计数据为车辆分配适当的速度轮廓,同时使用局部数据与前车保持合理的间距。通过这种方法分配的动作可以被提取并用作学习过程中的标签,但在没有广泛的通信和感知基础设施的情况下,实时计算这些动作是困难的,这就是我们第二项贡献的动机;
-
模仿学习算法增强鲁棒性。我们提供了一种方法来展示我们控制架构的灵活性以及其应对不同感知范式的能力。具体来说,我们展示了模仿学习能够成功地将从全局感知生成的行为映射到交通的局部可观察特征上,以一种鲁棒且有效的方式。这一结果表明,通过将学习方法与交通流理论所决定的专家响应相结合,可以生成高效的多智能体学习方法;
-
控制器参数优化微调。我们采用基于场景的优化方法,使用经验领导者轨迹来调整设计控制策略的参数。这允许我们在现实环境中可能遇到的不同场景和配置中选择具有良好性能的参数集。我们将优化后的参数性能与使用简单网格搜索调整的参数进行比较。
4.本文核心思想与方法
我们考虑的任务是在自动驾驶汽车(AVs,用红色表示)分布其中并与人类驾驶的车辆(HVs,用蓝色和白色表示,其中蓝色表示被AV感知的领先车辆)互动的环境中实现交通流协调。这个车队中AVs的目标是减少由于相邻车辆之间的不稳定串行互动而产生的干扰的增长和传播,并在此过程中将车辆的运动转向它们理想的均匀流动平衡状态。
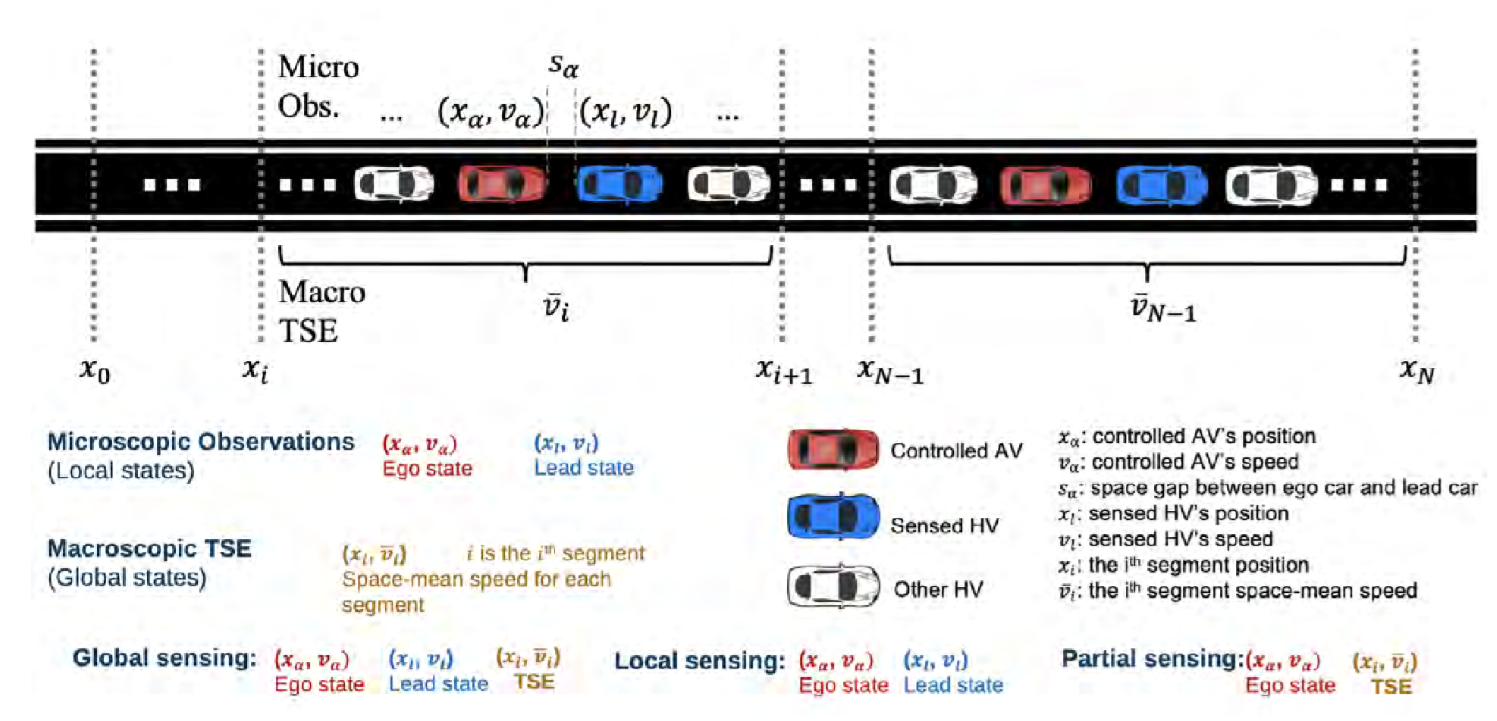
image
5.仿真实验验证
6.总结 && 展望
在本文中,我们提出了两种适用于不同感知范式的控制策略。第一种是基于核的双层控制器,它利用了全球交通状态估计数据。第二种是模仿学习控制器,它将第一个控制器作为专家来学习合理的驾驶行为,但在操作中仅依赖于局部感知数据。两种控制策略共享相似的架构,因此可以部署在同一辆车上,当实时全球TSE数据不可用时,可以在两者之间无缝过渡。从这个意义上说,模仿学习控制器作为基于核控制的支持机制。
两种控制器都使用真实世界的领导者轨迹在仿真中进行了评估,并被证明在平滑交通流和提高混合自主车队的能效方面是有效的。除了在仿真中进行评估外,所提出的控制器还在现场实验中部署,并在田纳西州纳什维尔I-24高速公路上进行了测试,时间是在早高峰时段。控制器的灵活架构及其对不同感知范式的鲁棒性使它们能够部署在100辆AV上,涵盖三种不同的汽车型号(日产Rogue、丰田RAV4和凯迪拉克XT5),具有不同的感知能力。控制器的灵活架构和对各种感知范式的鲁棒性使它们能够在三种不同汽车型号(日产Rogue、丰田RAV4和凯迪拉克XT5)的100辆自动驾驶车辆上部署,每种车型都有不同的感知能力。将在加利福尼亚州核桃溪的I-680高速公路上进行额外的实验,以进一步展示所提出的基于核和模仿学习控制策略的能力和性能。
总之,本文和相关现场实验展示了一种特定的能力:通过有效的流量控制来平滑走走停停的交通。它证明了AV确实可以通过局部感知和通过现有基础设施(例如4G LTE网络)进行通信来调节人类驾驶车辆的移动,这些基础设施提供了可能存在高延迟和低带宽的V2I2V通道。
所提出的架构验证了这种控制在不同车辆平台上是可行的。未来的工作将旨在探索通过车辆到车辆的协调实现的性能和能力的潜在提升,这种协调是通过本地通信和在更高渗透率下改进与云系统的连接来促进的。此外,在算法方面,所提出的架构可以扩展以集成额外的规划方法,如模型预测控制,以及基于Lyapunov的本地控制方法。


本文仅做学术分享,如有侵权,请联系删文!
更多优质内容,请关注公众号:智驾机器人技术前线




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











