







更多优质内容,请关注公众号:智驾机器人技术前线

1.论文信息
-
论文标题:Learning Multi-Modal Whole-Body Control for Real-World Humanoid Robots
-
作者:Pranay Dugar, Aayam Shrestha, Fangzhou Yu, Bart van Marum, Alan Fern
-
作者单位:俄勒冈州立大学协作机器人与智能系统(CoRIS)研究所
-
论文地址:https://arxiv.org/abs/2408.07295
-
项目主页地址:https://masked-humanoid.github.io/mhc/
2.摘要
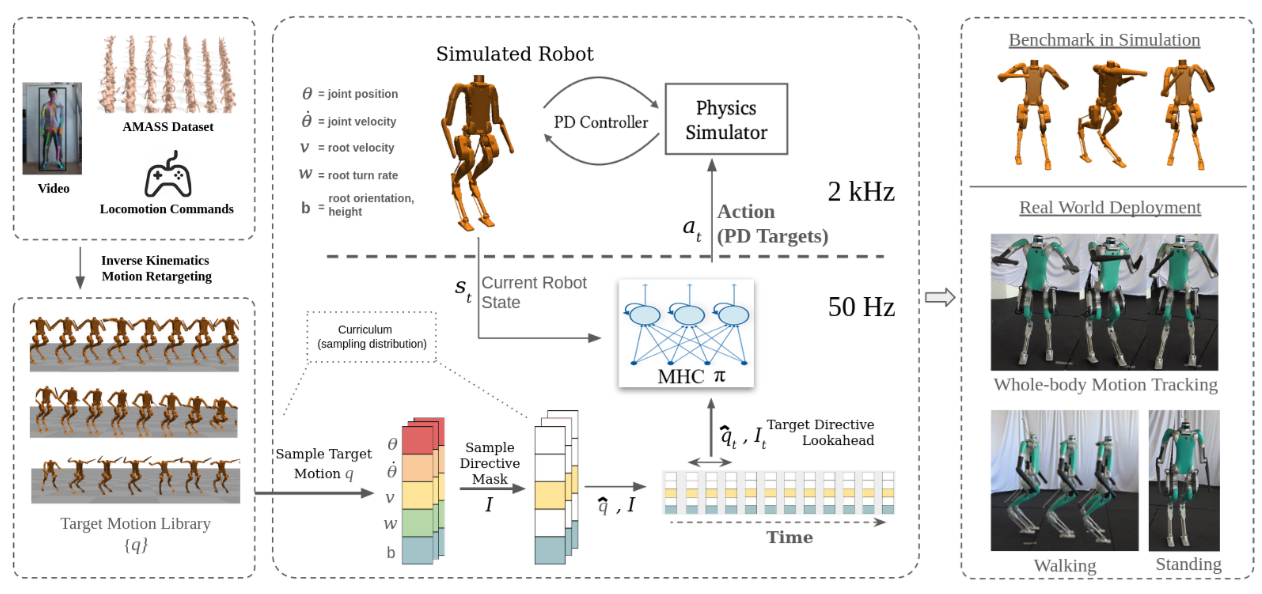
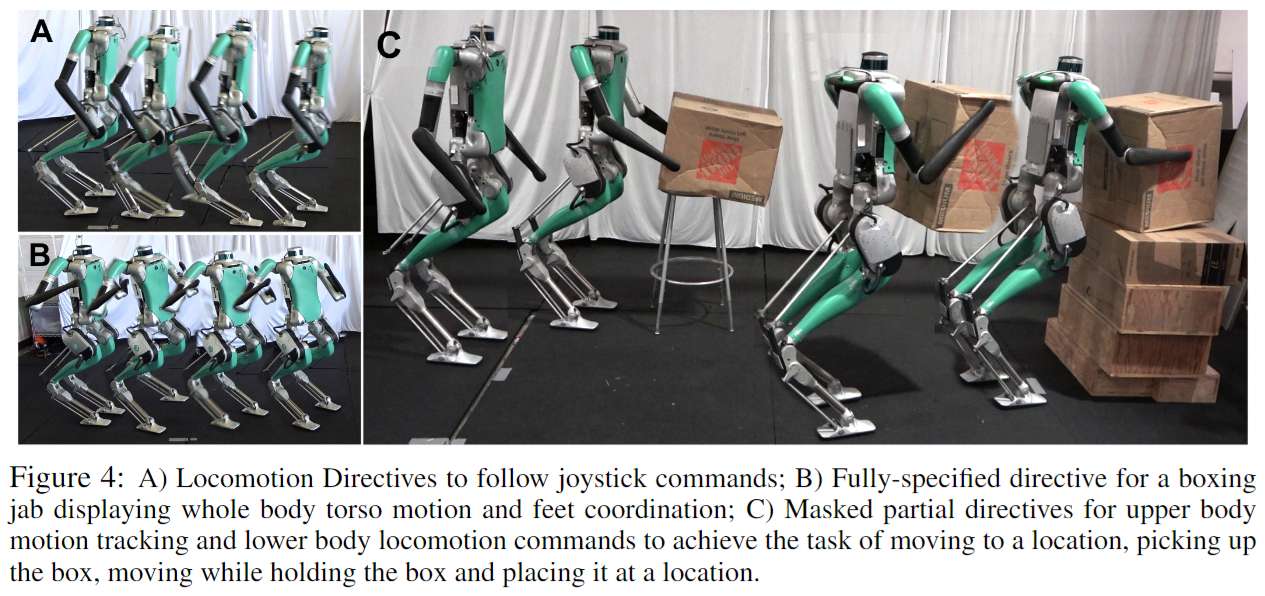
本文介绍了蒙面仿人控制器(Masked Humanoid Controller, MHC),用于跟踪任意仿人状态变量子集的目标轨迹的全身运动。这使得能够实现来自多样化来源的全身运动,例如视频、动作捕捉和虚拟现实,同时确保平衡和对干扰的鲁棒性。MHC在模拟环境中接受训练,使用精心设计的教学大纲模仿来自行为库的部分遮蔽动作,这些行为包括预训练策略的展开、优化的参考轨迹、重新定位的视频剪辑和人类动作捕捉数据。我们展示了模拟实验,验证了MHC执行各种行为的能力,这些行为来自部分指定的目标运动。此外,我们还强调了从模拟到现实的转移,这通过在Digit仿人机器人上进行的现实世界试验得到了证明。据我们所知,这是第一次学习控制器能够实现现实世界仿人机器人的全身控制,以应对如此多样化的多模态目标。
3.主要贡献
-
创新的全身体控制器设计: 文章提出了Masked Humanoid Controller (MHC),这是一个能够适应多种输入模态(视频、动作捕捉、虚拟现实)并执行全身运动的控制器。MHC的设计重点在于实现平衡性、鲁棒性以及在面对动态变化和外部干扰时的适应性,同时具备易于扩展和最小化重训练需求的特点,显著提升了人形机器人在复杂环境中的多用途运动能力。
-
模拟到现实世界的转移: 通过在模拟环境中对MHC进行基于课程的训练,结合精心设计的动态随机化策略,文章成功地将模拟中学习到的控制策略转移到了真实世界的Digit人形机器人上。这一转移不仅证明了MHC在多样化行为(如行走、拳击、物体拾取)中的稳健性,而且突显了其在面对现实世界复杂性时的泛化能力。
-
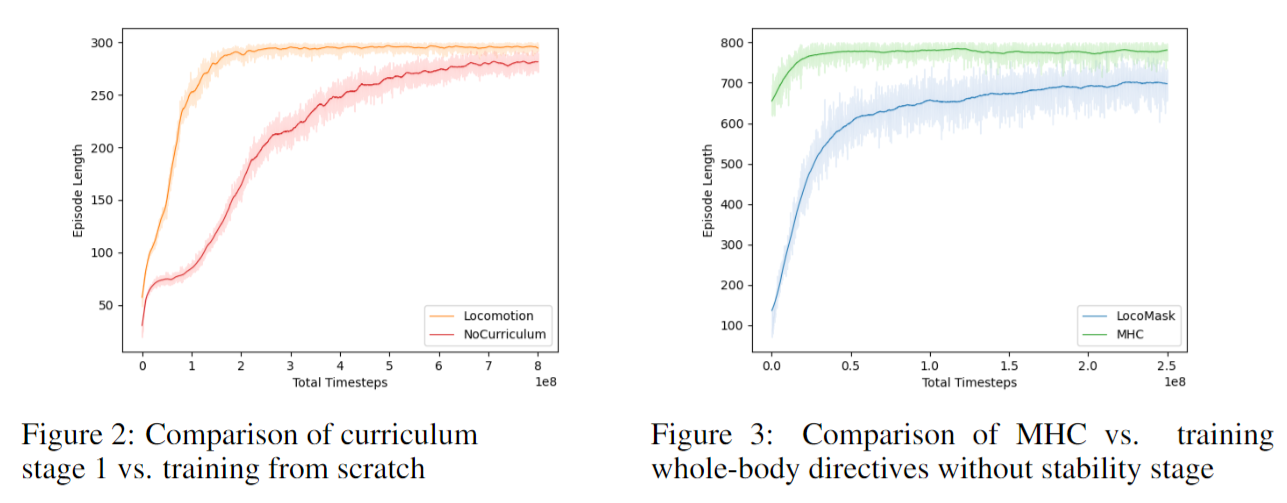
先进的训练和评估方法: 文章采用了分阶段的课程设计,逐步引导MHC学习基础的行走、稳定性和全身运动跟踪,确保了学习过程的稳定性和效率。同时,通过优化的LSTM网络架构和细致设计的奖励函数,MHC能够在模拟环境中实现精确的动作跟踪,并在现实世界中展示出良好的性能。此外,文章还深入分析了MHC的局限性,并提出了未来研究的方向,为进一步提升人形机器人的全身控制技术奠定了基础。
4.核心思想与方法
MHC是从与躯干运动命令配对的再定位人体动作数据集中学习得到的。在训练和测试期间,可以对目标运动轨迹应用掩蔽,以产生掩蔽运动指令,这些指令被提供给MHC。然后,MHC生成整个身体的PD设定点,以跟踪当前的运动指令。训练包括领域随机化和力量扰动,以促进鲁棒性并从模拟转移到真实机器人。
本文算法概述
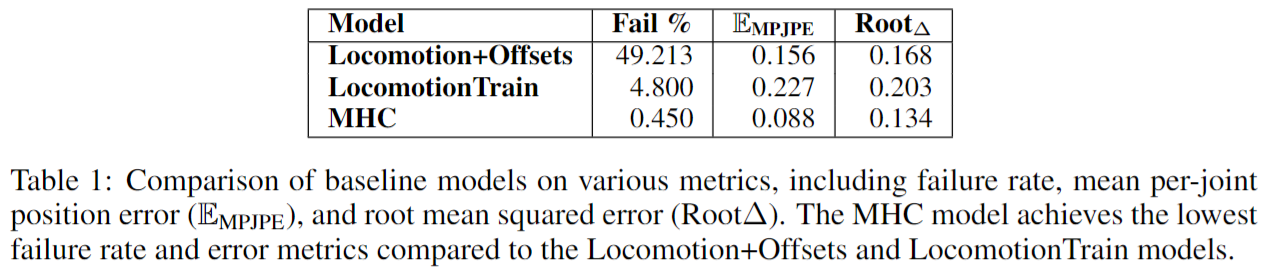
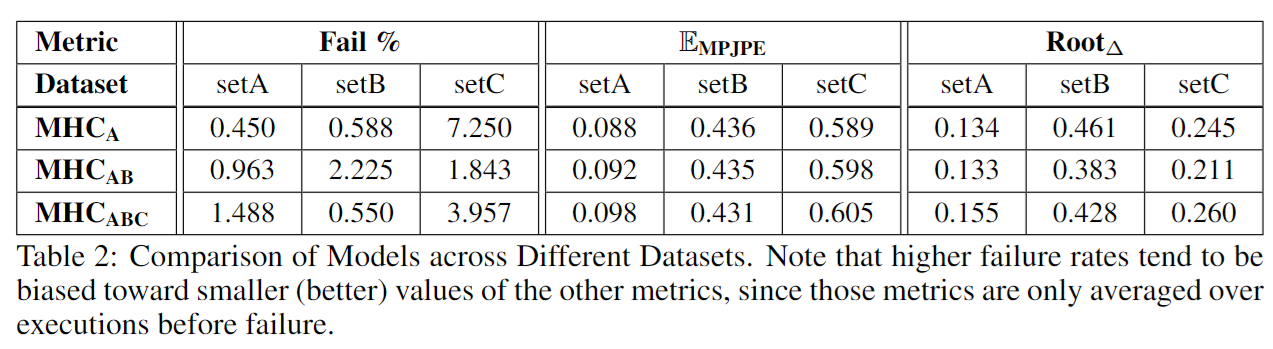
5.实验仿真验证
6.限制
目前的一个主要限制是显著的仿真到现实(sim-to-real)差距。这在脚部放置较宽或一只脚在空中停留较长时间的动作中尤为明显。我们的假设是,这种仿真到现实的限制需要更多地集中于仿真到现实转移的研究,可能通过整合现实世界的数据来实现。MHC已经成为突显这些差距的有用工具。我们当前训练方法的另一个限制是,我们在训练期间只考虑了有限的掩蔽模式集。支持完全通用的掩蔽可能会导致额外的鲁棒性,并为行为创作开辟新的可能性。最后,MHC目前没有考虑到与外部物体的交互,例如在拾取箱子时与箱子的交互。将需要操纵的物体明确地整合到MHC的输入和训练中,是支持实际应用的重要方向。

本文仅做学术分享,如有侵权,请联系删文!
更多优质内容,请关注公众号:智驾机器人技术前线




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











