









数据层DataLayer正向传导的目标层是卷积层ConvolutionLayer。卷积层的是用一系列的权重滤波核与输入图像进行卷积,具体实现是通过将图像展开成向量,作用矩阵乘法实现卷积。
同样,首先看一下卷积层的类图。
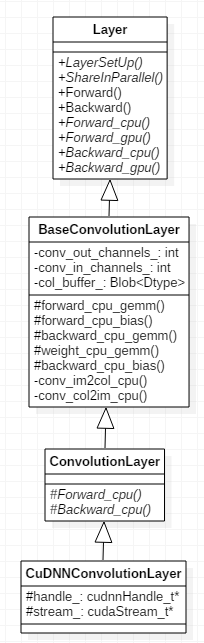
BaseConvolutionLayer类是所有卷积层的基类,它负责初始化滤波核、将图像转成向量,以及封装了BLAS库的矩阵运算函数。Yangqing Jia在Convolution in Caffe: a memo 一文中说明了卷积的实现方式和优缺点:优点是速度快,缺点也很明显,内存开销大。也还有Alex Krizhevsky等人更好的实现方式,但是由于时间和精力原因并没有采用,毕竟是不想写博士论文意外创作的 
ConvolutionLayer类是卷积层的实例类,如果系统支持cuDNN,则实例类为CuDNNConvolutionLayer。提醒一下,在CUDA计算能力3.0及以上的GPU上才支持cuDNN,这里CUDA GPUs 可以看到GPU的计算能力。如果当前GPU不支持cuDNN,Caffe又是默认开启cuDNN的,那么运行时构造CuDNNConvolutionLayer对象实例时将报错。这时需要在CommonSettings.props中将<UseCuDNN>标签改为false,或者在工程属性“C/C++”->“预处理器”中将USE_CUDNN定义项删除,再重新编译Caffe。
template <typename Dtype>
class BaseConvolutionLayer : public Layer<Dtype> {
public:
explicit BaseConvolutionLayer(const LayerParameter& param)
: Layer<Dtype>(param) {}
virtual void LayerSetUp(const vector<Blob<Dtype>*>& bottom,
const vector<Blob<Dtype>*>& top);
virtual void Reshape(const vector<Blob<Dtype>*>& bottom,
const vector<Blob<Dtype>*>& top);
virtual inline int MinBottomBlobs() const { return 1; }
virtual inline int MinTopBlobs() const { return 1; }
virtual inline bool EqualNumBottomTopBlobs() const { return true; }
protected:
// 一系列BLAS辅助函数
void forward_cpu_gemm(const Dtype* input, const Dtype* weights,
Dtype* output, bool skip_im2col = false);
void forward_cpu_bias(Dtype* output, const Dtype* bias);
void backward_cpu_gemm(const Dtype* input, const Dtype* weights,
Dtype* output);
void weight_cpu_gemm(const Dtype* input, const Dtype* output, Dtype*
weights);
void backward_cpu_bias(Dtype* bias, const Dtype* input);
#ifndef CPU_ONLY
void forward_gpu_gemm(const Dtype* col_input, const Dtype* weights,
Dtype* output, bool skip_im2col = false);
void forward_gpu_bias(Dtype* output, const Dtype* bias);
void backward_gpu_gemm(const Dtype* input, const Dtype* weights,
Dtype* col_output);
void weight_gpu_gemm(const Dtype* col_input, const Dtype* output, Dtype*
weights);
void backward_gpu_bias(Dtype* bias, const Dtype* input);
#endif
/// @brief The spatial dimensions of the input.
inline int input_shape(int i) {
return (*bottom_shape_)[channel_axis_ + i];
}
// 纯虚函数,用来识别是卷积(return false)还是反卷积(return true)
virtual bool reverse_dimensions() = 0;
// 纯虚函数,计算卷积后输出尺寸虚函数
virtual void compute_output_shape() = 0;
/// 卷积核尺寸
Blob<int> kernel_shape_;
/// 卷积核平移步幅
Blob<int> stride_;
/// 图像补齐像素数
Blob<int> pad_;
/// 图像膨胀像素数
Blob<int> dilation_;
/// @brief The spatial dimensions of the convolution input.
Blob<int> conv_input_shape_;
/// @brief The spatial dimensions of the col_buffer.
vector<int> col_buffer_shape_;
/// @brief The spatial dimensions of the output.
vector<int> output_shape_;
const vector<int>* bottom_shape_;
int num_spatial_axes_;
int bottom_dim_;
int top_dim_;
int channel_axis_;
int num_;
int channels_; // 通道数
int group_; // 组数
int out_spatial_dim_;
int weight_offset_; // 权重offset,此处为25*20 = 500
int num_output_; // 输出数
bool bias_term_; // 是否包含偏置项
bool is_1x1_; // 是否为1x1模式
bool force_nd_im2col_;
private:
// 将图像转成列向量
inline void conv_im2col_cpu(const Dtype* data, Dtype* col_buff) {
if (!force_nd_im2col_ && num_spatial_axes_ == 2) {
im2col_cpu(data, conv_in_channels_,
conv_input_shape_.cpu_data()[1], conv_input_shape_.cpu_data()[2],
kernel_shape_.cpu_data()[0], kernel_shape_.cpu_data()[1],
pad_.cpu_data()[0], pad_.cpu_data()[1],
stride_.cpu_data()[0], stride_.cpu_data()[1],
dilation_.cpu_data()[0], dilation_.cpu_data()[1], col_buff);
} else {
im2col_nd_cpu(data, num_spatial_axes_, conv_input_shape_.cpu_data(),
col_buffer_shape_.data(), kernel_shape_.cpu_data(),
pad_.cpu_data(), stride_.cpu_data(), dilation_.cpu_data(), col_buff);
}
}
inline void conv_col2im_cpu(const Dtype* col_buff, Dtype* data) {
if (!force_nd_im2col_ && num_spatial_axes_ == 2) {
col2im_cpu(col_buff, conv_in_channels_,
conv_input_shape_.cpu_data()[1], conv_input_shape_.cpu_data()[2],
kernel_shape_.cpu_data()[0], kernel_shape_.cpu_data()[1],
pad_.cpu_data()[0], pad_.cpu_data()[1],
stride_.cpu_data()[0], stride_.cpu_data()[1],
dilation_.cpu_data()[0], dilation_.cpu_data()[1], data);
} else {
col2im_nd_cpu(col_buff, num_spatial_axes_, conv_input_shape_.cpu_data(),
col_buffer_shape_.data(), kernel_shape_.cpu_data(),
pad_.cpu_data(), stride_.cpu_data(), dilation_.cpu_data(), data);
}
}
#ifndef CPU_ONLY
inline void conv_im2col_gpu(const Dtype* data, Dtype* col_buff) {
if (!force_nd_im2col_ && num_spatial_axes_ == 2) {
im2col_gpu(data, conv_in_channels_,
conv_input_shape_.cpu_data()[1], conv_input_shape_.cpu_data()[2],
kernel_shape_.cpu_data()[0], kernel_shape_.cpu_data()[1],
pad_.cpu_data()[0], pad_.cpu_data()[1],
stride_.cpu_data()[0], stride_.cpu_data()[1],
dilation_.cpu_data()[0], dilation_.cpu_data()[1], col_buff);
} else {
im2col_nd_gpu(data, num_spatial_axes_, num_kernels_im2col_,
conv_input_shape_.gpu_data(), col_buffer_.gpu_shape(),
kernel_shape_.gpu_data(), pad_.gpu_data(),
stride_.gpu_data(), dilation_.gpu_data(), col_buff);
}
}
inline void conv_col2im_gpu(const Dtype* col_buff, Dtype* data) {
if (!force_nd_im2col_ && num_spatial_axes_ == 2) {
col2im_gpu(col_buff, conv_in_channels_,
conv_input_shape_.cpu_data()[1], conv_input_shape_.cpu_data()[2],
kernel_shape_.cpu_data()[0], kernel_shape_.cpu_data()[1],
pad_.cpu_data()[0], pad_.cpu_data()[1],
stride_.cpu_data()[0], stride_.cpu_data()[1],
dilation_.cpu_data()[0], dilation_.cpu_data()[1], data);
} else {
col2im_nd_gpu(col_buff, num_spatial_axes_, num_kernels_col2im_,
conv_input_shape_.gpu_data(), col_buffer_.gpu_shape(),
kernel_shape_.gpu_data(), pad_.gpu_data(), stride_.gpu_data(),
dilation_.gpu_data(), data);
}
}
#endif
int num_kernels_im2col_;
int num_kernels_col2im_;
int conv_out_channels_; // 卷积操作输出通道数
int conv_in_channels_; // 卷积操作输入通道数
int conv_out_spatial_dim_;
int kernel_dim_; // 卷积核的尺寸(例如5x5卷积核,kernel_dim_为25)
int col_offset_;
int output_offset_;
Blob<Dtype> col_buffer_;
Blob<Dtype> bias_multiplier_;
};
base_conv_layer.cpp文件较长
template <typename Dtype>
void BaseConvolutionLayer<Dtype>::LayerSetUp(const vector<Blob<Dtype>*>& bottom,
const vector<Blob<Dtype>*>& top) {
// 设置滤波核尺寸等参数
ConvolutionParameter conv_param = this->layer_param_.convolution_param();
force_nd_im2col_ = conv_param.force_nd_im2col();
channel_axis_ = bottom[0]->CanonicalAxisIndex(conv_param.axis());
const int first_spatial_axis = channel_axis_ + 1;
const int num_axes = bottom[0]->num_axes();
num_spatial_axes_ = num_axes - first_spatial_axis;
CHECK_GE(num_spatial_axes_, 0);
vector<int> bottom_dim_blob_shape(1, num_spatial_axes_ + 1);
vector<int> spatial_dim_blob_shape(1, std::max(num_spatial_axes_, 1));
// 设置卷积核维度
kernel_shape_.Reshape(spatial_dim_blob_shape);
int* kernel_shape_data = kernel_shape_.mutable_cpu_data();
if (conv_param.has_kernel_h() || conv_param.has_kernel_w()) {
CHECK_EQ(num_spatial_axes_, 2)
<< "kernel_h & kernel_w can only be used for 2D convolution.";
CHECK_EQ(0, conv_param.kernel_size_size())
<< "Either kernel_size or kernel_h/w should be specified; not both.";
kernel_shape_data[0] = conv_param.kernel_h();
kernel_shape_data[1] = conv_param.kernel_w();
} else {
const int num_kernel_dims = conv_param.kernel_size_size();
CHECK(num_kernel_dims == 1 || num_kernel_dims == num_spatial_axes_)
<< "kernel_size must be specified once, or once per spatial dimension "
<< "(kernel_size specified " << num_kernel_dims << " times; "
<< num_spatial_axes_ << " spatial dims).";
for (int i = 0; i < num_spatial_axes_; ++i) {
kernel_shape_data[i] =
conv_param.kernel_size((num_kernel_dims == 1) ? 0 : i);
}
}
for (int i = 0; i < num_spatial_axes_; ++i) {
CHECK_GT(kernel_shape_data[i], 0) << "Filter dimensions must be nonzero.";
}
// 设置卷积核平移步幅
stride_.Reshape(spatial_dim_blob_shape);
int* stride_data = stride_.mutable_cpu_data();
if (conv_param.has_stride_h() || conv_param.has_stride_w()) {
CHECK_EQ(num_spatial_axes_, 2)
<< "stride_h & stride_w can only be used for 2D convolution.";
CHECK_EQ(0, conv_param.stride_size())
<< "Either stride or stride_h/w should be specified; not both.";
stride_data[0] = conv_param.stride_h();
stride_data[1] = conv_param.stride_w();
} else {
const int num_stride_dims = conv_param.stride_size();
CHECK(num_stride_dims == 0 || num_stride_dims == 1 ||
num_stride_dims == num_spatial_axes_)
<< "stride must be specified once, or once per spatial dimension "
<< "(stride specified " << num_stride_dims << " times; "
<< num_spatial_axes_ << " spatial dims).";
const int kDefaultStride = 1;
for (int i = 0; i < num_spatial_axes_; ++i) {
stride_data[i] = (num_stride_dims == 0) ? kDefaultStride :
conv_param.stride((num_stride_dims == 1) ? 0 : i);
CHECK_GT(stride_data[i], 0) << "Stride dimensions must be nonzero.";
}
}
// 设置图像补齐像素数
pad_.Reshape(spatial_dim_blob_shape);
int* pad_data = pad_.mutable_cpu_data();
if (conv_param.has_pad_h() || conv_param.has_pad_w()) {
CHECK_EQ(num_spatial_axes_, 2)
<< "pad_h & pad_w can only be used for 2D convolution.";
CHECK_EQ(0, conv_param.pad_size())
<< "Either pad or pad_h/w should be specified; not both.";
pad_data[0] = conv_param.pad_h();
pad_data[1] = conv_param.pad_w();
} else {
const int num_pad_dims = conv_param.pad_size();
CHECK(num_pad_dims == 0 || num_pad_dims == 1 ||
num_pad_dims == num_spatial_axes_)
<< "pad must be specified once, or once per spatial dimension "
<< "(pad specified " << num_pad_dims << " times; "
<< num_spatial_axes_ << " spatial dims).";
const int kDefaultPad = 0;
for (int i = 0; i < num_spatial_axes_; ++i) {
pad_data[i] = (num_pad_dims == 0) ? kDefaultPad :
conv_param.pad((num_pad_dims == 1) ? 0 : i);
}
}
// 设置图像膨胀像素数
dilation_.Reshape(spatial_dim_blob_shape);
int* dilation_data = dilation_.mutable_cpu_data();
const int num_dilation_dims = conv_param.dilation_size();
CHECK(num_dilation_dims == 0 || num_dilation_dims == 1 ||
num_dilation_dims == num_spatial_axes_)
<< "dilation must be specified once, or once per spatial dimension "
<< "(dilation specified " << num_dilation_dims << " times; "
<< num_spatial_axes_ << " spatial dims).";
const int kDefaultDilation = 1;
for (int i = 0; i < num_spatial_axes_; ++i) {
dilation_data[i] = (num_dilation_dims == 0) ? kDefaultDilation :
conv_param.dilation((num_dilation_dims == 1) ? 0 : i);
}
// 只有对于尺寸1x1、平移步幅为1、图像不补齐的卷积核才将标志位1x1置为true
is_1x1_ = true;
for (int i = 0; i < num_spatial_axes_; ++i) {
is_1x1_ &=
kernel_shape_data[i] == 1 && stride_data[i] == 1 && pad_data[i] == 0;
if (!is_1x1_) { break; }
}
// 配置通道数
channels_ = bottom[0]->shape(channel_axis_);
num_output_ = this->layer_param_.convolution_param().num_output();
CHECK_GT(num_output_, 0);
group_ = this->layer_param_.convolution_param().group();
CHECK_EQ(channels_ % group_, 0);
CHECK_EQ(num_output_ % group_, 0)
<< "Number of output should be multiples of group.";
if (reverse_dimensions()) {
conv_out_channels_ = channels_;
conv_in_channels_ = num_output_;
} else {
conv_out_channels_ = num_output_; // 设置卷积操作输出通道数
conv_in_channels_ = channels_; // 设置卷积操作输入通道数
}
// 处理权重参数和偏置参数
// - blobs_[0] holds the filter weights
// - blobs_[1] holds the biases (optional)
vector<int> weight_shape(2);
weight_shape[0] = conv_out_channels_;
weight_shape[1] = conv_in_channels_ / group_;
for (int i = 0; i < num_spatial_axes_; ++i) {
weight_shape.push_back(kernel_shape_data[i]);
}
// 从配置中读取是否包含偏置项
bias_term_ = this->layer_param_.convolution_param().bias_term();
vector<int> bias_shape(bias_term_, num_output_);
if (this->blobs_.size() > 0) {
CHECK_EQ(1 + bias_term_, this->blobs_.size())
<< "Incorrect number of weight blobs.";
if (weight_shape != this->blobs_[0]->shape()) {
Blob<Dtype> weight_shaped_blob(weight_shape);
LOG(FATAL) << "Incorrect weight shape: expected shape "
<< weight_shaped_blob.shape_string() << "; instead, shape was "
<< this->blobs_[0]->shape_string();
}
if (bias_term_ && bias_shape != this->blobs_[1]->shape()) {
Blob<Dtype> bias_shaped_blob(bias_shape);
LOG(FATAL) << "Incorrect bias shape: expected shape "
<< bias_shaped_blob.shape_string() << "; instead, shape was "
<< this->blobs_[1]->shape_string();
}
LOG(INFO) << "Skipping parameter initialization";
} else {
if (bias_term_) {
this->blobs_.resize(2); // 如果包含偏置项,则blobs_为两项
} else {
this->blobs_.resize(1); // 如果不包含偏置项,则blobs_只有一项(权重项)
}
// 初始化和填充权重
// output channels x input channels per-group x kernel height x kernel width
this->blobs_[0].reset(new Blob<Dtype>(weight_shape));
shared_ptr<Filler<Dtype> > weight_filler(GetFiller<Dtype>(
this->layer_param_.convolution_param().weight_filler()));
// 使用随机数填充Xavier滤波核
weight_filler->Fill(this->blobs_[0].get());
// 如果启用偏置,则初始化偏置滤波核
if (bias_term_) {
this->blobs_[1].reset(new Blob<Dtype>(bias_shape));
shared_ptr<Filler<Dtype> > bias_filler(GetFiller<Dtype>(
this->layer_param_.convolution_param().bias_filler()));
// 使用0填充偏置滤波核
bias_filler->Fill(this->blobs_[1].get());
}
}
kernel_dim_ = this->blobs_[0]->count(1);
// 计算权重offset
weight_offset_ = conv_out_channels_ * kernel_dim_ / group_;
// Propagate gradients to the parameters (as directed by backward pass).
this->param_propagate_down_.resize(this->blobs_.size(), true);
}
// 正向传导矩阵运算函数
template <typename Dtype>
void BaseConvolutionLayer<Dtype>::forward_cpu_gemm(const Dtype* input,
const Dtype* weights, Dtype* output, bool skip_im2col) {
// 先将图像转为列向量
const Dtype* col_buff = input;
if (!is_1x1_) {
if (!skip_im2col) {
conv_im2col_cpu(input, col_buffer_.mutable_cpu_data());
}
col_buff = col_buffer_.cpu_data();
}
// 矩阵乘法实现卷积运算
for (int g = 0; g < group_; ++g) {
caffe_cpu_gemm<Dtype>(CblasNoTrans, CblasNoTrans, conv_out_channels_ /
group_, conv_out_spatial_dim_, kernel_dim_,
(Dtype)1., weights + weight_offset_ * g, col_buff + col_offset_ * g,
(Dtype)0., output + output_offset_ * g);
}
}
// CPU正向传导偏置(在上一步卷积计算结果上加上偏置)
template <typename Dtype>
void BaseConvolutionLayer<Dtype>::forward_cpu_bias(Dtype* output,
const Dtype* bias) {
caffe_cpu_gemm<Dtype>(CblasNoTrans, CblasNoTrans, num_output_,
out_spatial_dim_, 1, (Dtype)1., bias, bias_multiplier_.cpu_data(),
(Dtype)1., output);
}
// CPU反向传导
template <typename Dtype>
void BaseConvolutionLayer<Dtype>::backward_cpu_gemm(const Dtype* output,
const Dtype* weights, Dtype* input) {
Dtype* col_buff = col_buffer_.mutable_cpu_data();
if (is_1x1_) {
col_buff = input;
}
for (int g = 0; g < group_; ++g) {
caffe_cpu_gemm<Dtype>(CblasTrans, CblasNoTrans, kernel_dim_,
conv_out_spatial_dim_, conv_out_channels_ / group_,
(Dtype)1., weights + weight_offset_ * g, output + output_offset_ * g,
(Dtype)0., col_buff + col_offset_ * g);
}
if (!is_1x1_) {
conv_col2im_cpu(col_buff, input);
}
}
// CPU计算权重的偏导
template <typename Dtype>
void BaseConvolutionLayer<Dtype>::weight_cpu_gemm(const Dtype* input,
const Dtype* output, Dtype* weights) {
const Dtype* col_buff = input;
if (!is_1x1_) {
conv_im2col_cpu(input, col_buffer_.mutable_cpu_data());
col_buff = col_buffer_.cpu_data();
}
for (int g = 0; g < group_; ++g) {
caffe_cpu_gemm<Dtype>(CblasNoTrans, CblasTrans, conv_out_channels_ / group_,
kernel_dim_, conv_out_spatial_dim_,
(Dtype)1., output + output_offset_ * g, col_buff + col_offset_ * g,
(Dtype)1., weights + weight_offset_ * g);
}
}
// CPU反向传导偏置项
template <typename Dtype>
void BaseConvolutionLayer<Dtype>::backward_cpu_bias(Dtype* bias,
const Dtype* input) {
caffe_cpu_gemv<Dtype>(CblasNoTrans, num_output_, out_spatial_dim_, 1.,
input, bias_multiplier_.cpu_data(), 1., bias);
}
#ifndef CPU_ONLY
// GPU正向传导
template <typename Dtype>
void BaseConvolutionLayer<Dtype>::forward_gpu_gemm(const Dtype* input,
const Dtype* weights, Dtype* output, bool skip_im2col) {
const Dtype* col_buff = input;
if (!is_1x1_) {
if (!skip_im2col) {
conv_im2col_gpu(input, col_buffer_.mutable_gpu_data());
}
col_buff = col_buffer_.gpu_data();
}
for (int g = 0; g < group_; ++g) {
caffe_gpu_gemm<Dtype>(CblasNoTrans, CblasNoTrans, conv_out_channels_ /
group_, conv_out_spatial_dim_, kernel_dim_,
(Dtype)1., weights + weight_offset_ * g, col_buff + col_offset_ * g,
(Dtype)0., output + output_offset_ * g);
}
}
// GPU正向传导偏置项
template <typename Dtype>
void BaseConvolutionLayer<Dtype>::forward_gpu_bias(Dtype* output,
const Dtype* bias) {
caffe_gpu_gemm<Dtype>(CblasNoTrans, CblasNoTrans, num_output_,
out_spatial_dim_, 1, (Dtype)1., bias, bias_multiplier_.gpu_data(),
(Dtype)1., output);
}
// GPU计算数据项偏导
template <typename Dtype>
void BaseConvolutionLayer<Dtype>::backward_gpu_gemm(const Dtype* output,
const Dtype* weights, Dtype* input) {
Dtype* col_buff = col_buffer_.mutable_gpu_data();
if (is_1x1_) {
col_buff = input;
}
for (int g = 0; g < group_; ++g) {
caffe_gpu_gemm<Dtype>(CblasTrans, CblasNoTrans, kernel_dim_,
conv_out_spatial_dim_, conv_out_channels_ / group_,
(Dtype)1., weights + weight_offset_ * g, output + output_offset_ * g,
(Dtype)0., col_buff + col_offset_ * g);
}
if (!is_1x1_) {
conv_col2im_gpu(col_buff, input);
}
}
// GPU计算权重的偏导
template <typename Dtype>
void BaseConvolutionLayer<Dtype>::weight_gpu_gemm(const Dtype* input,
const Dtype* output, Dtype* weights) {
const Dtype* col_buff = input;
if (!is_1x1_) {
conv_im2col_gpu(input, col_buffer_.mutable_gpu_data());
col_buff = col_buffer_.gpu_data();
}
for (int g = 0; g < group_; ++g) {
caffe_gpu_gemm<Dtype>(CblasNoTrans, CblasTrans, conv_out_channels_ / group_,
kernel_dim_, conv_out_spatial_dim_,
(Dtype)1., output + output_offset_ * g, col_buff + col_offset_ * g,
(Dtype)1., weights + weight_offset_ * g);
}
}
// GPU反向传导偏置项
template <typename Dtype>
void BaseConvolutionLayer<Dtype>::backward_gpu_bias(Dtype* bias,
const Dtype* input) {
caffe_gpu_gemv<Dtype>(CblasNoTrans, num_output_, out_spatial_dim_, 1.,
input, bias_multiplier_.gpu_data(), 1., bias);
}














 2898
2898

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









