







By Long Luo
PID 算法 s是自动控制领域中很重要的算法。
𝑢(𝑡)=𝐾𝑃𝑒(𝑡)+𝐾𝐼∫𝑒(𝑡)d𝑡+𝐾𝐷d𝑒(𝑡)d𝑡
Simple PID Controller
非常简单的 PID 算法在线互动式模拟器,传送门 → :
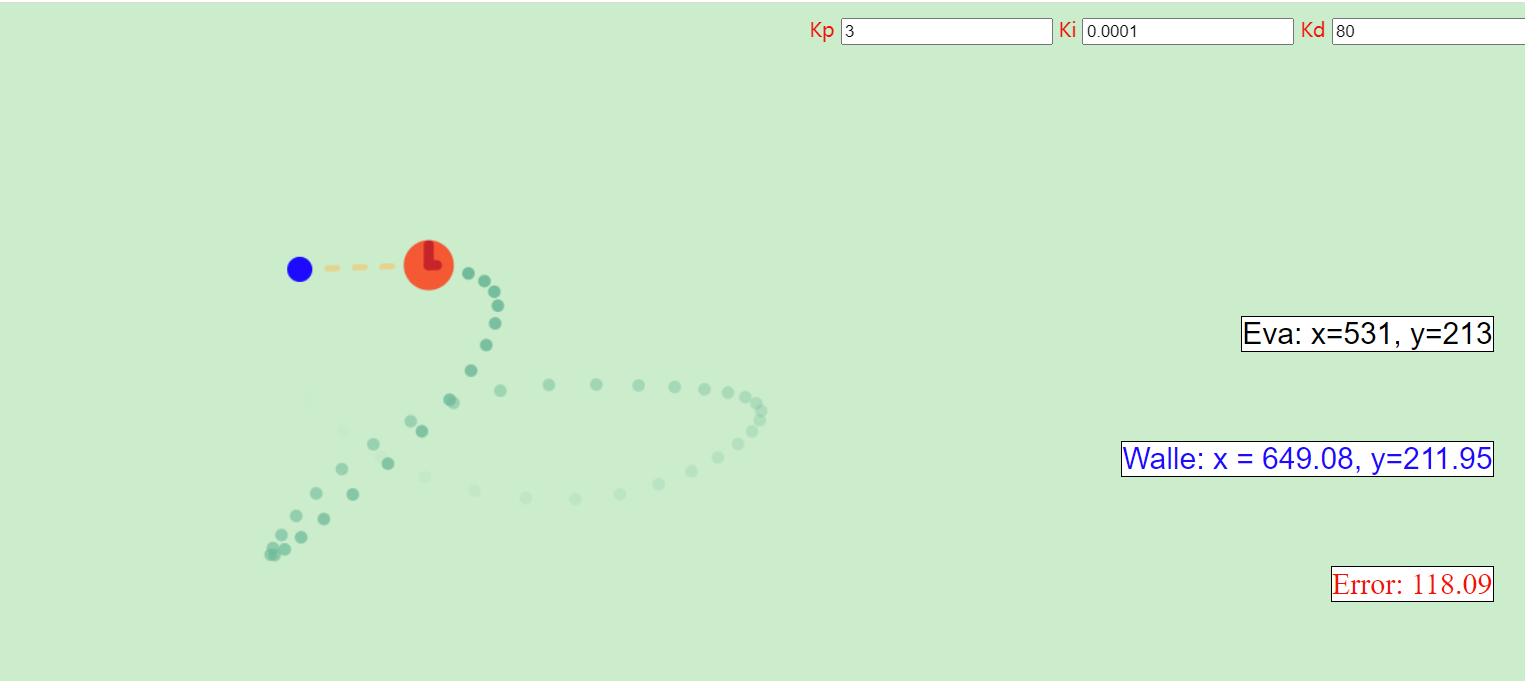
之前这个是 PID v1.0 版本,最近重构了代码,增加了一些新功能:
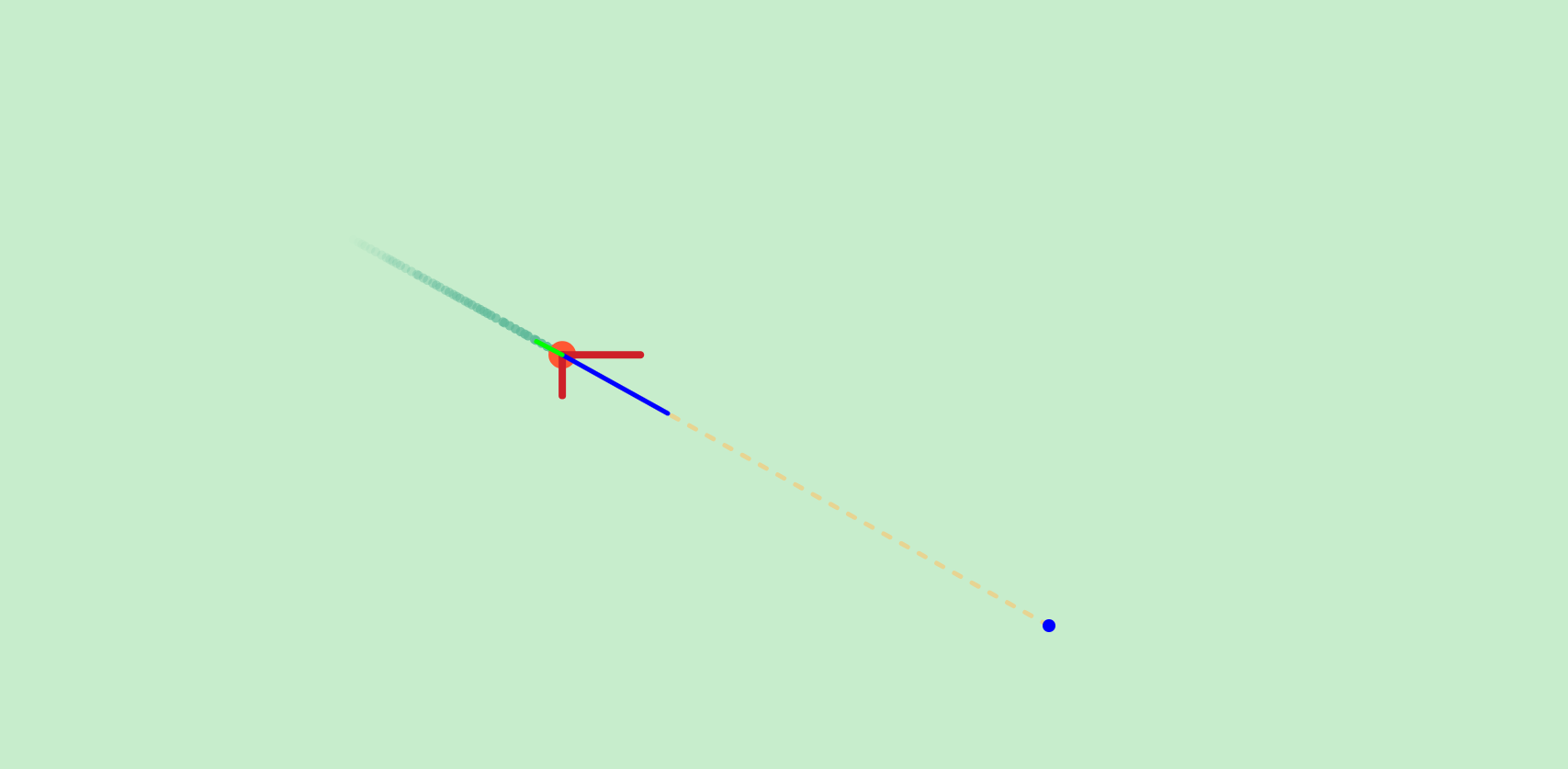
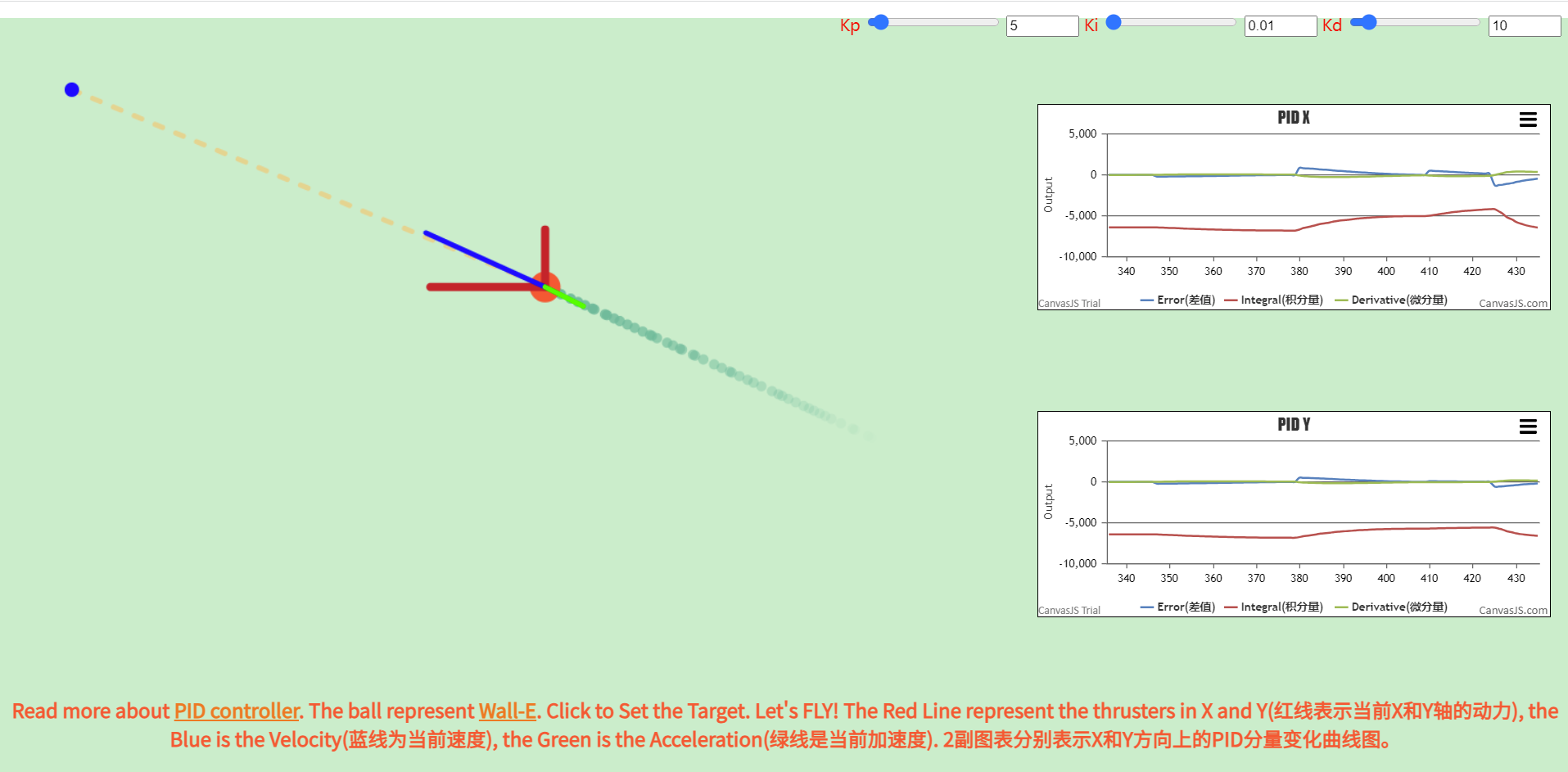
- 增加机器人速度 𝑣 及加速度 𝑎 显示;
- 增加 2 个图表展示 PID X 轴方向及 Y 轴方向的 P、I、D 3 个分量随时间变化显示;
- 之前代码将时间及速度固定了,但这不符合实际,增加随 𝑑𝑡 变化积分和微分项;
ToDos:
- 增加阻力因素,以更接近实际;
- 增加自动调谐P,I,D 3个参数的功能,目前开发中。
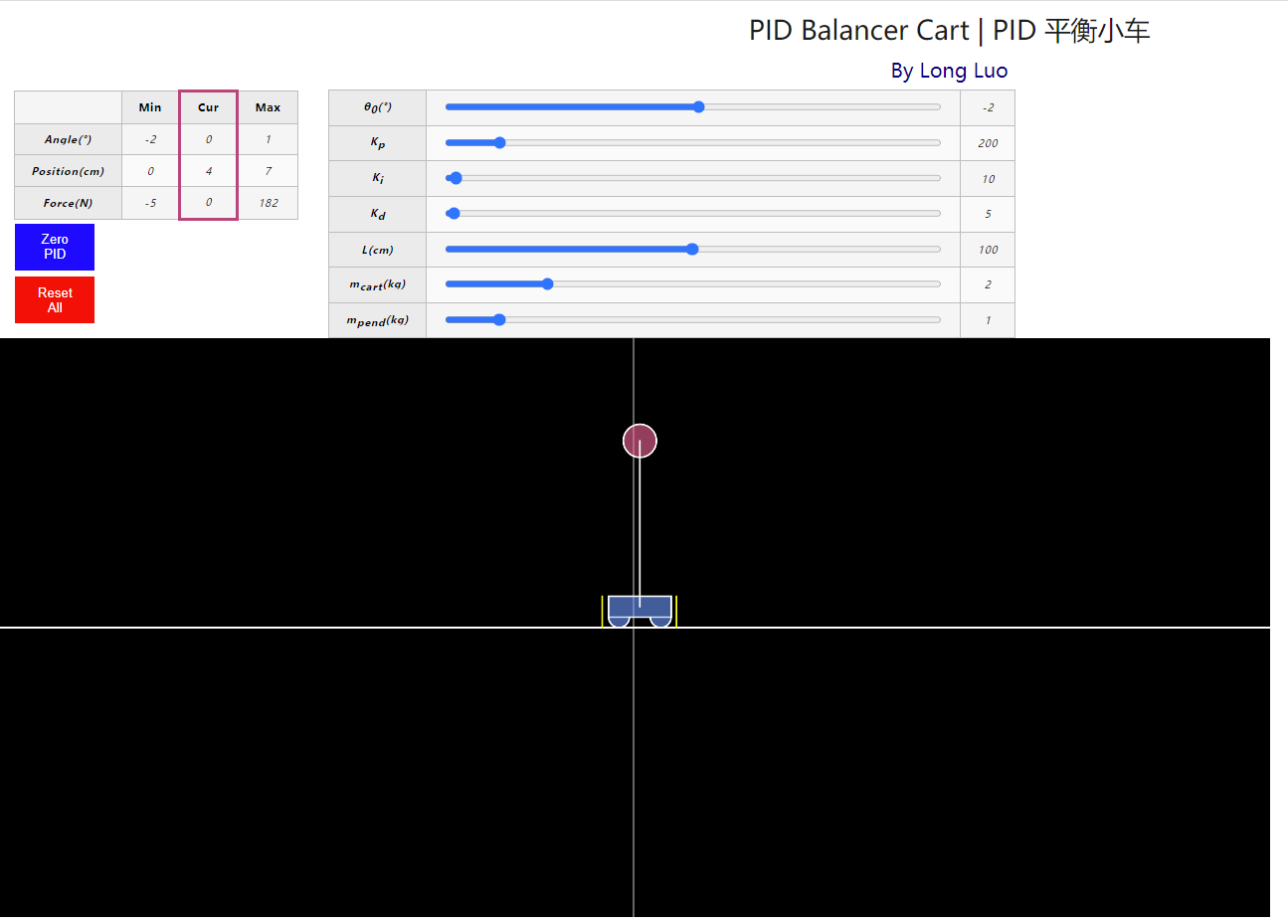
PID 平衡小车
PID 平衡小车 在线网络版,传送门 → :
参考文献
1 PID Controller 2. OpenCV
请我一杯咖啡吧!

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









