









Vision Transformer
发表单位:Google
发表时间:2020年
1. inductive bias的理解
VIT验证了一个重要的结论:当训练数据达到千万级别的时候,transformer结构可以跨过本身缺少的inductive bias,达到比传统的resnet更好的效果。
When trained on mid-sized datasets such as ImageNet without strong regularization, these models yield modest accuracies of a few percentage points below ResNets of comparable size. This seemingly discouraging outcome may be expected: Transformers lack some of the inductive biases.
However, the picture changes if the models are trained on larger datasets (14M-300M images). We find that large scale training trumps inductive bias. Our Vision Transformer (ViT) attains excellent results when pre-trained at sufficient scale and transferred to tasks with fewer datapoints. When pre-trained on the public ImageNet-21k dataset or the in-house JFT-300M dataset, ViT approaches or beats state of the art on multiple image recognition benchmarks.
“归纳偏置”(inductive bias)是指模型在学习时对数据的某些先验假设或偏好。
对于图像数据来说,归纳偏置体现在:
空间局部性:图像在空间上相邻的位置往往具有相关性。因此,CNN通过卷积可以获取到图像中的局部特征。
平移不变性:图像中的目标物体在图像中移动,它依然还是该物体。CNN通过卷积和池化等操作,神经网络能够实现对于物体在图像中位置的不敏感性。
尺度不变性:图像中的目标物体的大小发生变化,它依然还是该物体。CNN通过池化层等操作,可以在一定程度上对尺度变化具有不变性。
换句话说,CNN的结构的设计是适应于图像的这三个先验信息的。但是transformer的结构设计最开始是适应于文本数据的,文本数据的归纳偏置与图像不同,它体现在:
自注意力机制:需要通过self-attention关注到序列中所有位置的信息(而不仅仅是局部的上下文,像图像数据那样),因为我们说话时的某个字,可能和整句话中的每个字都有关联。
2. 数据集
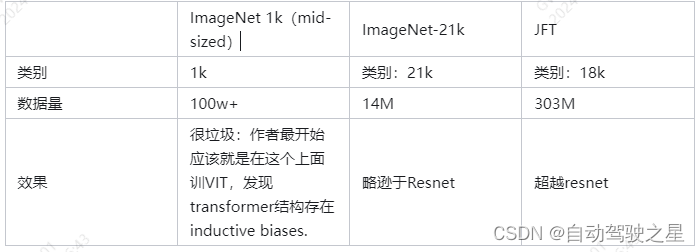
VIT的使用方法:在大数据集上进行pre-train,然后在任务对应的小数据集上进行finetune。一套组合拳下来,效果超越了Resnet。
3. VIT结构梳理:
3.1 整体结构图

这是一段CLIP中VIT的代码,与原始的VIT略有不同:
def forward(self, x: torch.Tensor):
x = self.conv1(x) # shape = [*, width, grid, grid]
x = x.reshape(x.shape[0], x.shape[1], -1) # shape = [*, width, grid ** 2]
x = x.permute(0, 2, 1) # shape = [*, grid ** 2, width]
# class embedding
x = torch.cat([self.class_embedding.to(x.dtype) + torch.zeros(x.shape[0], 1, x.shape[-1], dtype=x.dtype, device=x.device), x], dim=1) # shape = [*, grid ** 2 + 1, width]
# pos embedding
x = x + self.positional_embedding.to(x.dtype)
#layer norm
x = self.ln_pre(x)
# transformer
x = x.permute(1, 0, 2) # NLD -> LND
x = self.transformer(x)
x = x.permute(1, 0, 2) # LND -> NLD
# layer norm
x = self.ln_post(x[:, 0, :])
# 线性映射
if self.proj is not None:
x = x @ self.proj
return x
3.2 tensor 数据流
1. 输入数据的预处理
从debug信息可以看出,输入为224 * 224的图像。conv1是一个stride为32,kernel_size为32的,输入输出通道分别为3和768的卷积核。相当于是卷积核在每个3232的patch上提取特征,生成的是77个patch对应的768维特征。


2. Class embedding
从整体结构图中可以看出,VIT仿照Bert结构,在所有embeddings(这些embeddings在VIT中是从每个patch中提取的特征)的最前面加上了一个用于分类的可学习的class embedding。在self attention的过程中,这个class embedding可以浏览到所有图像embeddings中的内容。相当于是加权所有patch的特征,代表整张图像的特征,最后用于输出一个分类的结果。

self.class_embedding.shape
#debug info
#torch.Size([768])
x.shape
#debug info
#torch.Size([1,50,768])
3. Position embedding
图像分成7*7个patch 外加一个class embedding,一共是50个768维度的embeddings。因此,对应的可学习的position embedding也是50个。
self.positional_embeddig.shape
# debug info
# torch.Size([50,768])
这里需要思考下:预训练的时候是固定224224分辨率的图,在finetune下游分类任务的时候,通常是更大分辨率的图像。我们不必担心embeddings数量对于transformer网络结构本身的影响,因为QKV本身就是矩阵乘法,只要向量长度(hidden dim)不变就行,就可以在pretrain的transformer网络params的基础上继续finetune。但是embeddings数量的变化,会直接使得position embedding失去意义,比如77变成14*14,这个时候就需要用到插值的方法来初始化pretrain模型的position embedding参数,重新赋予它意义,然后进行finetune。
4. Transformer
class QuickGELU(nn.Module):
def forward(self, x: torch.Tensor):
return x * torch.sigmoid(1.702 * x)
class ResidualAttentionBlock(nn.Module):
def __init__(self, d_model: int, n_head: int, attn_mask: torch.Tensor = None):
super().__init__()
self.attn = nn.MultiheadAttention(d_model, n_head)
self.ln_1 = LayerNorm(d_model)
self.mlp = nn.Sequential(OrderedDict([
("c_fc", nn.Linear(d_model, d_model * 4)),
("gelu", QuickGELU()),
("c_proj", nn.Linear(d_model * 4, d_model))
]))
self.ln_2 = LayerNorm(d_model)
self.attn_mask = attn_mask
def attention(self, x: torch.Tensor):
self.attn_mask = self.attn_mask.to(dtype=x.dtype, device=x.device) if self.attn_mask is not None else None
return self.attn(x, x, x, need_weights=False, attn_mask=self.attn_mask)[0]
def forward(self, x: torch.Tensor):
x = x + self.attention(self.ln_1(x))
x = x + self.mlp(self.ln_2(x))
return x
class Transformer(nn.Module):
def __init__(self, width: int, layers: int, heads: int, attn_mask: torch.Tensor = None):
super().__init__()
self.width = width
self.layers = layers
self.resblocks = nn.Sequential(*[ResidualAttentionBlock(width, heads, attn_mask) for _ in range(layers)])
def forward(self, x: torch.Tensor):
return self.resblocks(x)
没什么可说的,设置Layers层数,hidden dim,heads,MLP size就好了。

5. 下游任务
# layer norm
x = self.ln_post(x[:,0,:])
#线性映射
if self.proj is not None:
x = x @ self.proj
return x
只用class embedding(768维度的特征向量),进一步进行线性映射到新的特征空间。对于下游的分类任务,可以接一个FC层得到最终的分类结果。
在CLIP的工作中,class embedding被映射到另外一个512维的特征空间中,然后与文本提取的特征之间计算相似度。这个时候,所谓的class embedding所代表的就是整张图像的特征。
-------------------------------------------------------------------------------------------
Swin Transformer
原文:https://arxiv.org/abs/2103.14030
2021年微软研究院 ICCV Best Paper
背景
Google Brain团队在2020年提出了Vision Transformer(VIT),但是VIT存在的问题是它的结构依然是适用于文本任务的,也就是global attention。VIT原文中用了一定的篇幅强调了transformer结构用于视觉任务中需要大量的数据集来训练,原因就是所谓的 inductive biases。
大概意思就是文本任务和视觉任务的特点不同,像gpt这种文本预测的任务,每预测一个词,它需要把前面所有的词都看一遍,transformer中不管是self-attention还是cross-attention都是在特征的整个集合中进行的,这就是为啥transformer最开始就是用于NLP的。
而我们知道,图像特征的特点是Local的(不管是传统的surf、orb,还是CNN都是在局部提取特征),VIT沿用了transformer的原始设计,在全局计算attention,这样做不光不符合图像特征的特点,而且计算量也非常大。另外,VIT也没有尝试将多尺度加进去。因此在分割、检测任务上也一般,它只是提供了vision领域一种transformer最早的范式。
1. Swin Transformer的结构总览

1.1 Swin Transformer Blocks 以外其他的结构设计:
- Patch Partition
将图像分块,每个patch大小为44,然后flatten程44*3 = 48维度,最后一个patch就代表一个48维度的token embedding。 - Linear Embedding
将patch原始的48维像素值映射到某个特征空间中,特征维度为C - Patch Merging
这是一种降采样的方式,经过Patch Merging后整个feature map分辨率2倍降采样,且通道数*2(后面展开说)
1.2 Swin Transformer Blocks:
- W-MSA(Window-Multi Self Attention)
每m*m个patch作为一个window,在这个window里面进行self-attention - SW-MSA(Shift Window-Multi Self Attention)
对Window的形状做一些微调,让W-MSA中设计的不同window之间也有一些信息融合(这块感觉有点像传统图像增强中一些基于分块的方法,在边界做一些融合过度)
1.3 Patch与Window:
patch:这个图中最小的方格(灰色方格)表示一个patch,一个patch也是一个token,也是一个像素点。比如最下边这层feature map上一个小方格patch就是由443的原图flatten成的48维向量,也就是最初始的token。
window:由灰色方格组成的红色方格表示一个window。

从上图中可以看出,不同层的feature map上的一个patch/token 所对应原图上的图像块尺寸是不同的,这个思想就类似金字塔的多尺度。
2. Patch Partition
Patch Partition是将原图上一个个4×4×3通道的图像块展开拉平成48维向量的过程。
3. Patch Merging 结构
Patch Merging总体来讲是一个将4×4个patch转换成2×2×4个小的patch的过程。

具体就是把4*4个patch拆分并concat到一起。整体feature map的分辨率更小,同奥数更多。下图中一个方格表示一个像素。

然后分别经过Layer Norm层和另外一层linear:

OK,那么对一个完整的feature map上的所有patch都做Patching Merging的操作,最终的结果就是这个feature map的分辨率会2倍下采样,通道数会倍数乘2。
4. Swin Transformer Block
4.1 W-MSA(Window-Multi Self Attention)
用一句话解释就是在window中做self attention。以Swin Transformer的中间这一层处理为例,假设一个windows包含4×4个patch,那么W-MSA只在windows中做self attention。

4.2 SW-MSA(Shift Window-Multi Self Attention)
同样以中间这层feature map为例,对window的形状和size做微调,layerL+1层第一行的第二个windows中的tokens在做self attention的时候相当于是把layerL层的左上角和右上角windows中的token做了特征融合。

为了计算的方便,作者实际上由加了一些矩阵的循环移位和mask操作:

总结
Swin transformer 是对transformer的范式做了一些更适合视觉任务的优化。用window和shift-window的方法来让提取的图像特征在局部做一些attention,并在相邻的windows之间也做了特征融合的处理。在商汤的deformable detr中也用到了类似这种将local feature与transformer相结合的思想。
另外,Swin Transformer 可以在不同尺度上提取图像特征,对分割、检测任务更友好。
从现在这个时间节点来看,Swin Transformer已经在很多视觉任务中作为backbone来提取特征,例如:Dino,Grounding-Dino等等。















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









