






机器人寻宝游戏
要求
- 自动生成地图, 包括障碍物, 陷阱, 宝物, 机器人位置
- 键盘 / 鼠标 操作寻宝
- 记录路径, 显示路径, 直接显示
- 设置游戏级别, 计分
- 机器人生命数量, 生命数(加 减), 生命清空游戏结束
- 机器人有两个形象, 供用户选择, 在开始游戏的时候选择
- 得分够了可以进入下一关, 一共三关
- 有开始游戏界面
- 用easyX写界面
- 画uml图
使用C++和easyX库写一个机器人寻宝游戏, 游戏共3关, 游戏开始时可以选择机器人形象, 每关自动生成地图, 地图中包含障碍物, 陷阱, 宝物, 使用键盘控制机器人移动, 实时显示机器人移动路径, 机器人碰到陷阱会掉血, 碰到宝物会加分, 血量清空游戏结束, 分数到达规定值可以进入下一关
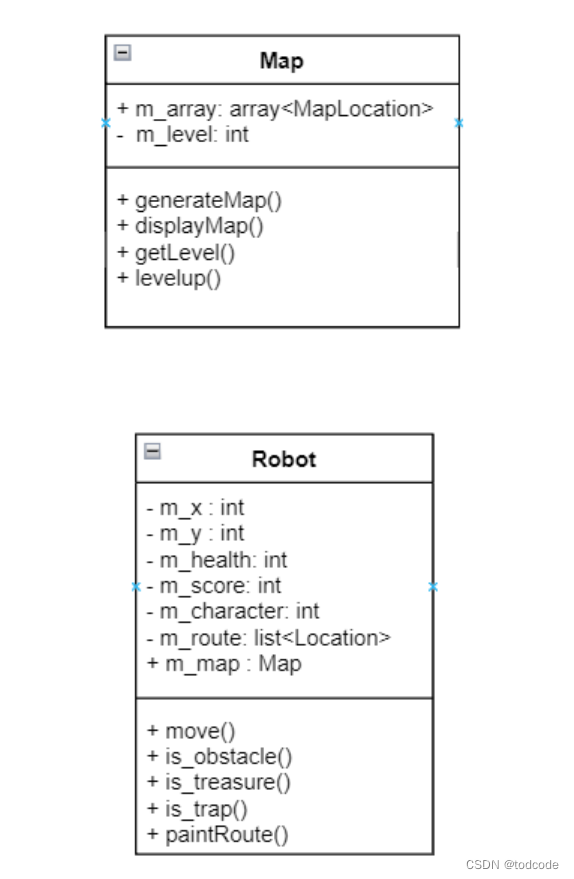
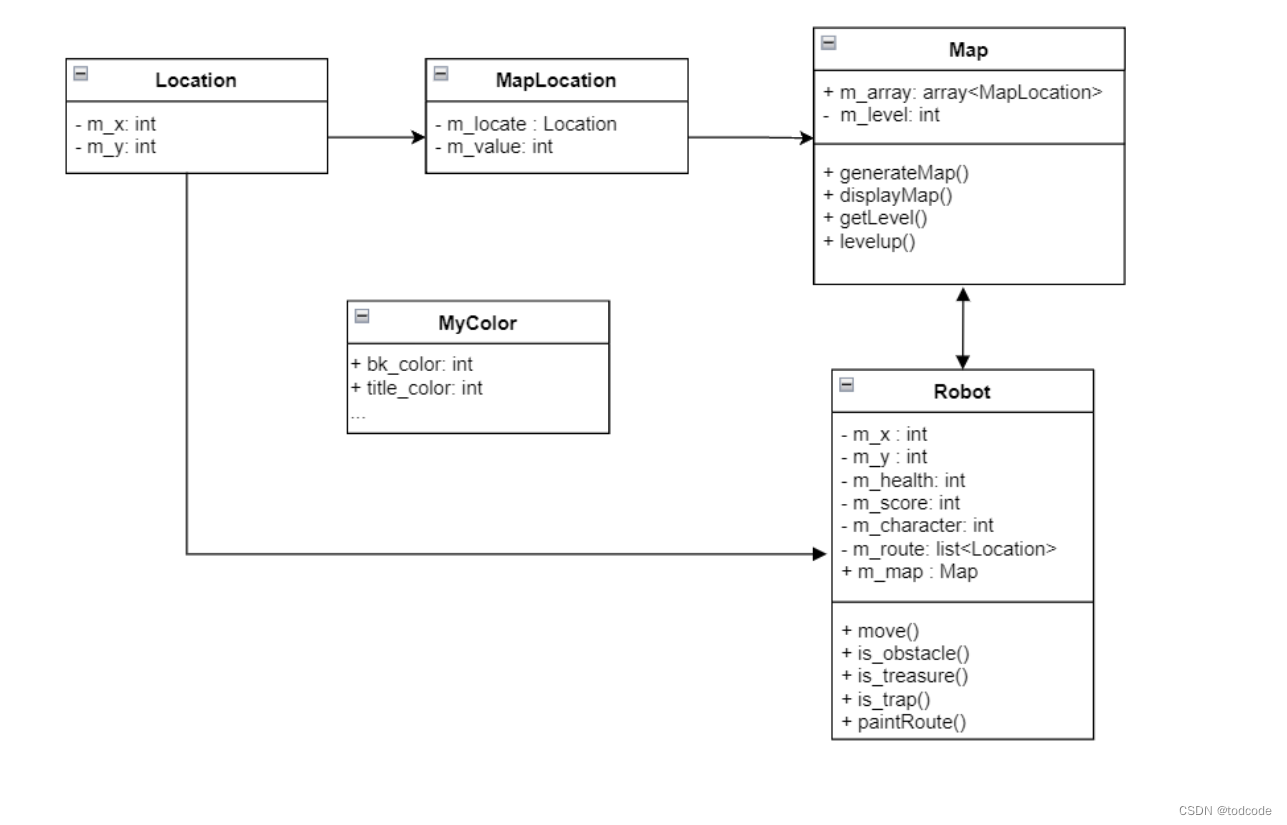
类设计
- 地图类
宝物列表 障碍物 机器人类 陷阱位置 地图尺寸 地图自动生成 关卡名称
- 宝物类
类别 分值 数量 位置
- 机器人类
出发地点 生命 形象(2个) 行走路径 现在分数
- 路径类
使用链表等容器类实现
- 障碍物类
障碍物位置 障碍物形状
- 显示类
将各项信息显示在窗口
- 控制类
控制游戏进程
#include<iostream>
// 宝物类
class Treasure {
public:
enum class Category {
// 定义宝物的不同类别
};
Treasure(Category category, int value, int x, int y);
// 获取宝物的分值
int getValue() const;
// 获取宝物的位置
int getX() const;
int getY() const;
private:
Category m_category;
int m_value;
int m_x;
int m_y;
};
// 障碍物类
class Obstacle {
public:
Obstacle(int x, int y, char shape);
// 获取障碍物的位置
int getX() const;
int getY() const;
// 获取障碍物的形状
char getShape() const;
private:
int m_x;
int m_y;
char m_shape;
};
// 机器人类
class Robot {
public:
enum class Character {
// 定义不同形象
};
Robot(int startX, int startY, int maxHealth, Character character);
// 机器人移动
void move(int deltaX, int deltaY);
// 处理碰撞逻辑
void handleCollision(const Treasure& treasure);
void handleCollision(const Obstacle& obstacle);
// 更新分数和健康值
void updateScore(int value);
void updateHealth(int amount);
// 获取机器人信息
int getX() const;
int getY() const;
int getHealth() const;
int getScore() const;
Character getCharacter() const;
private:
int m_x;
int m_y;
int m_health;
int m_score;
Character m_character;
// 使用路径类来记录行走路径
};
// 地图类
class Map {
public:
Map(int width, int height, const std::string& levelName);
// 自动生成地图,包括障碍物、宝物等
void generateMap();
// 显示地图
void displayMap() const;
private:
int m_width;
int m_height;
std::string m_levelName;
// 使用容器来存储宝物、障碍物等信息
};
// 控制类
class GameController {
public:
void startGame();
void processInput();
void updateGame();
void endGame();
private:
// 包含地图、机器人、宝物、障碍物等对象
};
// 显示类(假设你使用easyX来绘制图形界面)
class GameDisplay {
public:
GameDisplay();
// 初始化图形界面
void initDisplay();
// 显示地图、机器人、宝物等信息
void displayMap(const Map& map);
void displayRobot(const Robot& robot);
void displayTreasures(const std::vector<Treasure>& treasures);
void displayObstacles(const std::vector<Obstacle>& obstacles);
private:
// 使用easyX等来进行图形绘制
};
int main()
{
}
使用wsad控制小球移动
#include<conio.h>
#include<windows.h>
#include <graphics.h>
#include<iostream>
int main()
{
initgraph(1000, 640, SHOWCONSOLE);//创建一个窗口
setbkcolor(WHITE);//设置窗口颜色
cleardevice();//刷新一下,防止窗口颜色不变
int x = 0;
int y = 0;
setfillcolor(BLACK);
fillcircle(x, y, 20);
while (1)
{
cleardevice();
//控制球
setfillcolor(BLACK);
fillcircle(x, y, 20);
char key = _getch();
switch (key)
{
case 'w':
y -= 50;
break;
case 's':
y += 50;
break;
case 'a':
x -= 50;
break;
case 'd':
x += 50;
break;
}
}
closegraph();
return 0;
}















 1315
1315











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









