







Matlab双目标定与python-opencv配置标定参数
1. matlab工具箱进行双目标定
最近开始学习双目视觉,网上看到了很多大佬的博客与代码。为了以后学习方便,特此以学习笔记的方式记下,如有侵权请联系。下面正式开始:
- 打开matlab2016,点击APP,如图:

- 选择里面的Stereo Camera Calibrator选项

- 这里可以先导入图片,也可以先勾选红色的三个,看个人习惯

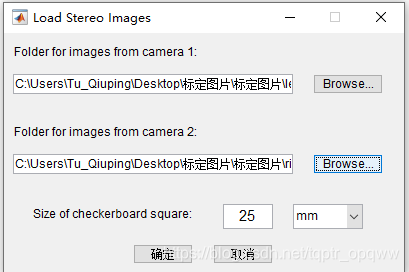
- 依次选择左右相机图片路径,然后根据自己标定板一格棋盘的长度更改25这个值
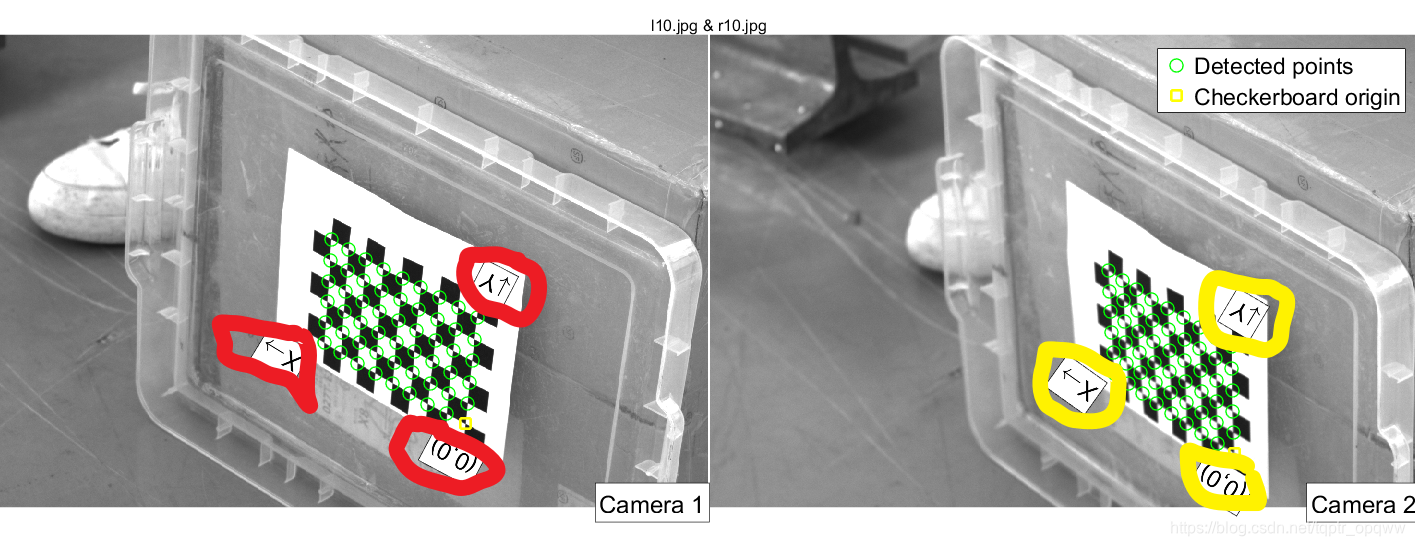
- 点击确定,matlab会选择图片里可以用来标定的图片对,抛弃无用的图片对。这里要注意检查一下剩下的图片对是不是合格,怎么检查呢,就是看看x,y,(0,0)是不是对应的,如果不对应就移除这一对图片
- 最后点击标定按钮,标定结束后可以根据需要删除误差值较大的图片对,满足误差要求后导出参数即可。
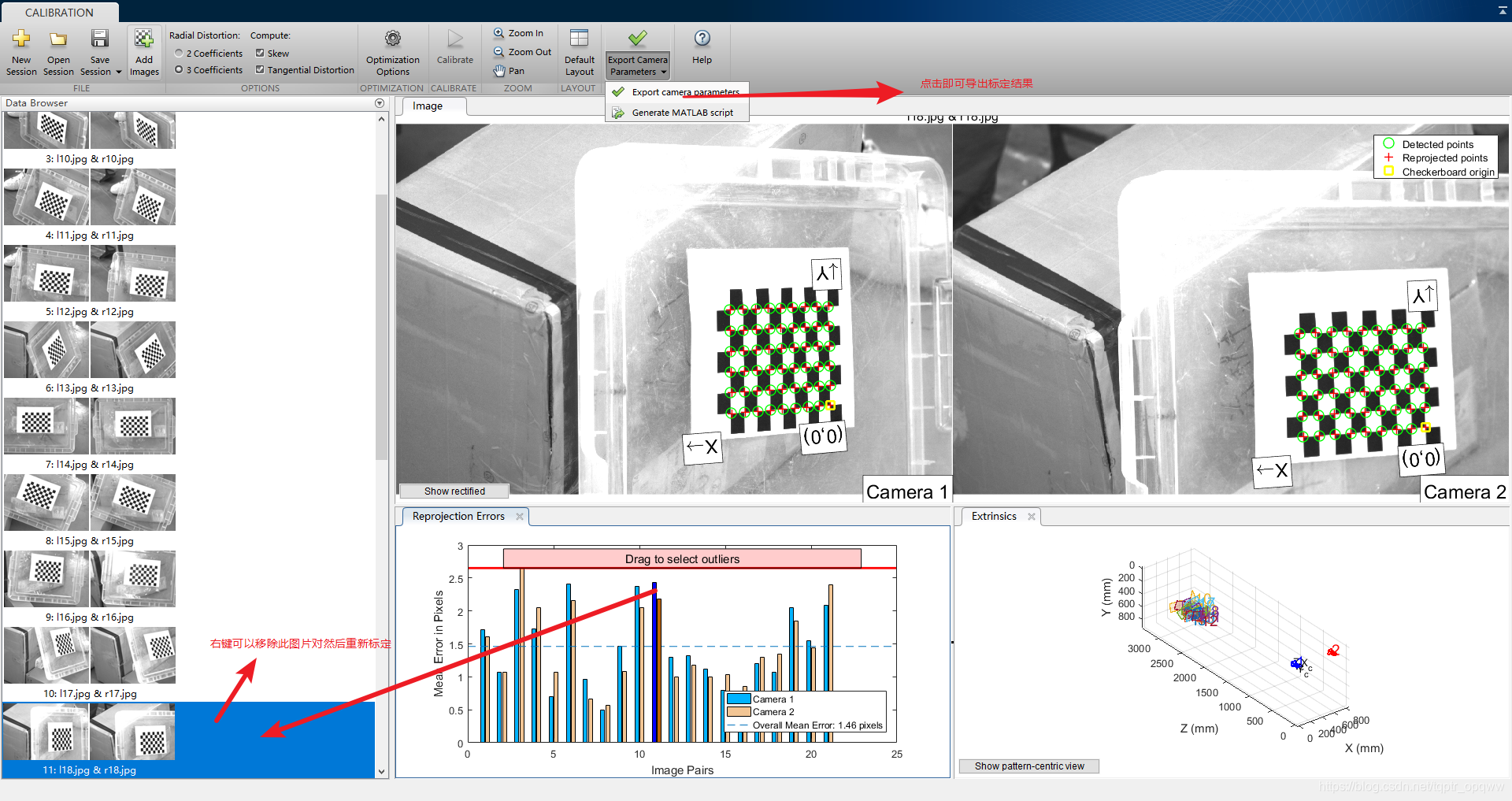
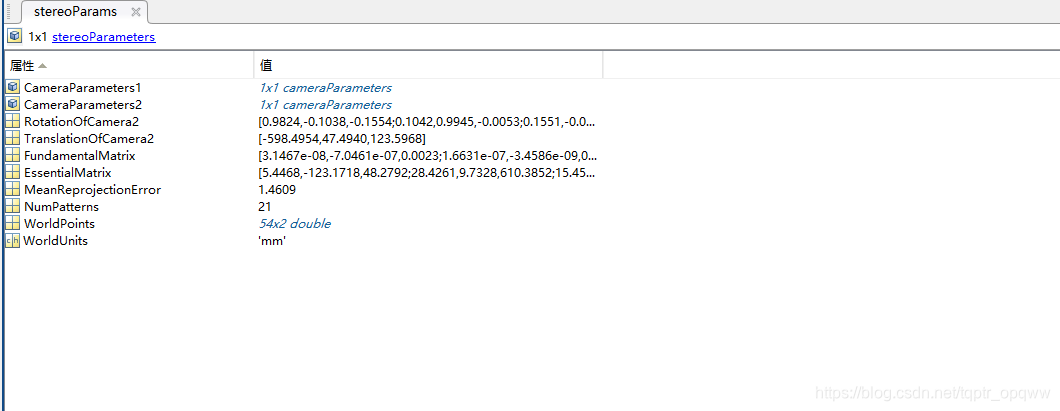
- 标定结果如下图所示,我们需要的是里面的左右相机的内参以及右相机相对于左相机的旋转矩阵和平移矩阵。
2. 将matlab标定的结果配置到opencv代码中
先看相机参数配置代码:
import cv2
import numpy as np
left_camera_matrix = np.array([[11400.3867063356, -708.226944360597, 3133.52343114698],
[0, 13324.7161808224, -10327.0186882030],
[0., 0., 1.]])
left_distortion = np.array([[-0.310893555601236, 0.0890628201287691, -0.0140441135262092, 0.0123461575310137, 0.00252759610639547]])
right_camera_matrix = np.array([[8028.19082160345, 693.566448971348, 6053.49742648582],
[0, 7693.28688589561, -8280.86166418103],
[0, 0, 1.0000]])
right_distortion = np.array([[-0.173533544692552, 0.0151082474541149, -0.000650491166259009, 0.0343271672455320, -0.0208062597406380]])
R = np.matrix([
[0.974689632070511, 0.0643464338449411, 0.214101979406287],
[-0.0393006325473173, 0.992086337617053, -0.119248308142979],
[-0.220080851996788, 0.107815746368611, 0.969505122946417],
])
# print(R)
T = np.array([-313.537577682651, -115.635560045160, -158.970732961818]) # 平移关系向量
size = (3072, 2048) # 图像尺寸
# 进行立体更正
R1, R2, P1, P2, Q, validPixROI1, validPixROI2 = cv2.stereoRectify(left_camera_matrix, left_distortion,
right_camera_matrix, right_distortion, size, R,
T)
# 计算更正map
left_map1, left_map2 = cv2.initUndistortRectifyMap(left_camera_matrix, left_distortion, R1, P1, size, cv2.CV_16SC2)
right_map1, right_map2 = cv2.initUndistortRectifyMap(right_camera_matrix, right_distortion, R2, P2, size, cv2.CV_16SC2)
# print(Q)
left_camera_matrix:左相机的内参,输入到python中记得要将matlab的结果进行转置
left_distortion:左相机的畸变参数——RadialDistortion:径向畸变,摄像头由于光学透镜的特性使得成像存在着径向畸变,可由K1,K2,K3确定;TangentialDistortion:切向畸变,由于装配方面的误差,传感器与光学镜头之间并非完全平行,因此成像存在切向畸变,可由两个参数P1,P2确定。
使用时,需要注意参数的排放顺序,即K1,K2,P1,P2,K3。切记不可弄错,否则后续的立体匹配会出现很大的偏差。
右相机同理
代码里面R为右相机相对于左相机的旋转矩阵,对应着matlab的stereoParams.RotationOfCamera2参数,输入到python代码里直接输入,不需要转置
代码里的T为右相机相对于左相机的平移矩阵,对应着matlab的stereoParams.TranslationOfCamera2参数,直接输入即可














 376
376











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









