







 本文介绍了Marr Hildreth边缘检测算法,包括使用高斯滤波器平滑图像,计算拉普拉斯算子,寻找过零点。还提到了与Canny算法的比较,Canny算法通过高斯滤波减少噪声,结合滞后阈值判断边缘,以提高准确性。
本文介绍了Marr Hildreth边缘检测算法,包括使用高斯滤波器平滑图像,计算拉普拉斯算子,寻找过零点。还提到了与Canny算法的比较,Canny算法通过高斯滤波减少噪声,结合滞后阈值判断边缘,以提高准确性。
先说算法过程
1. 用Gaussian Filter平滑图像
2. 求Laplacian 二阶导 Laplacian参考http://blog.csdn.net/traumland/article/details/51077236
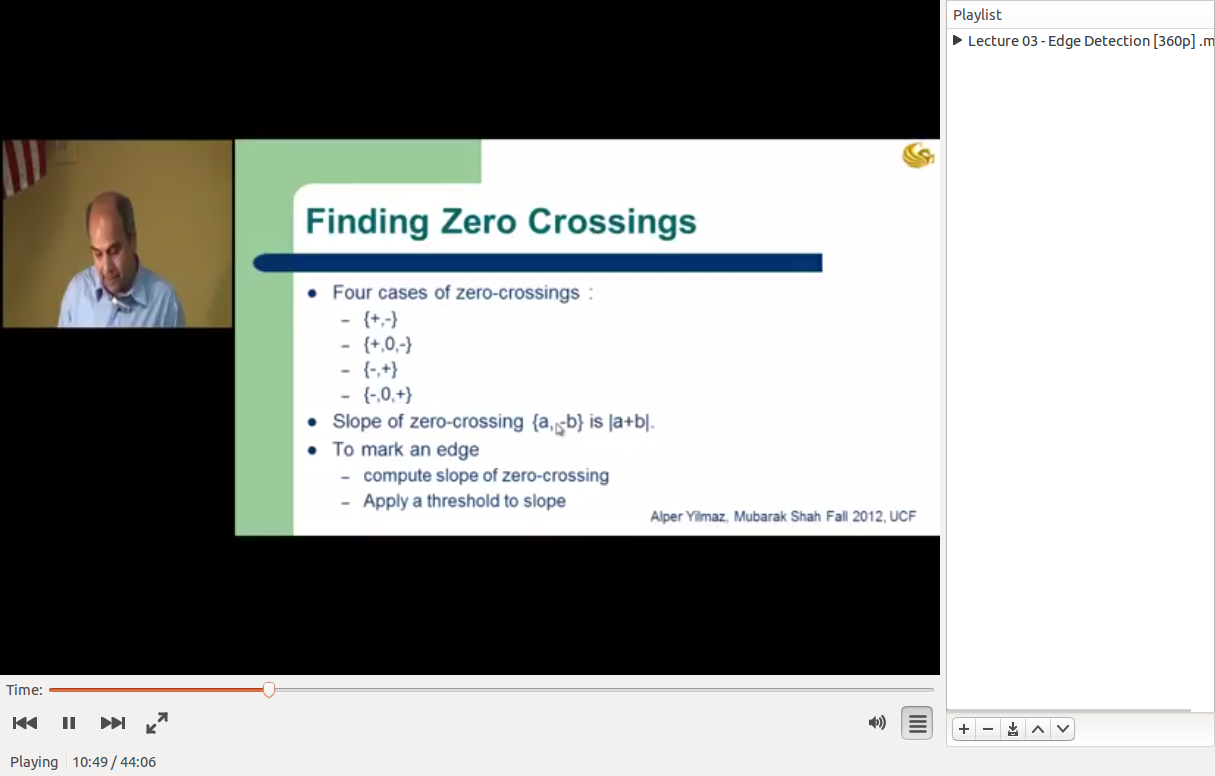
3. 求zero crossing 的点(过零点)
也可以
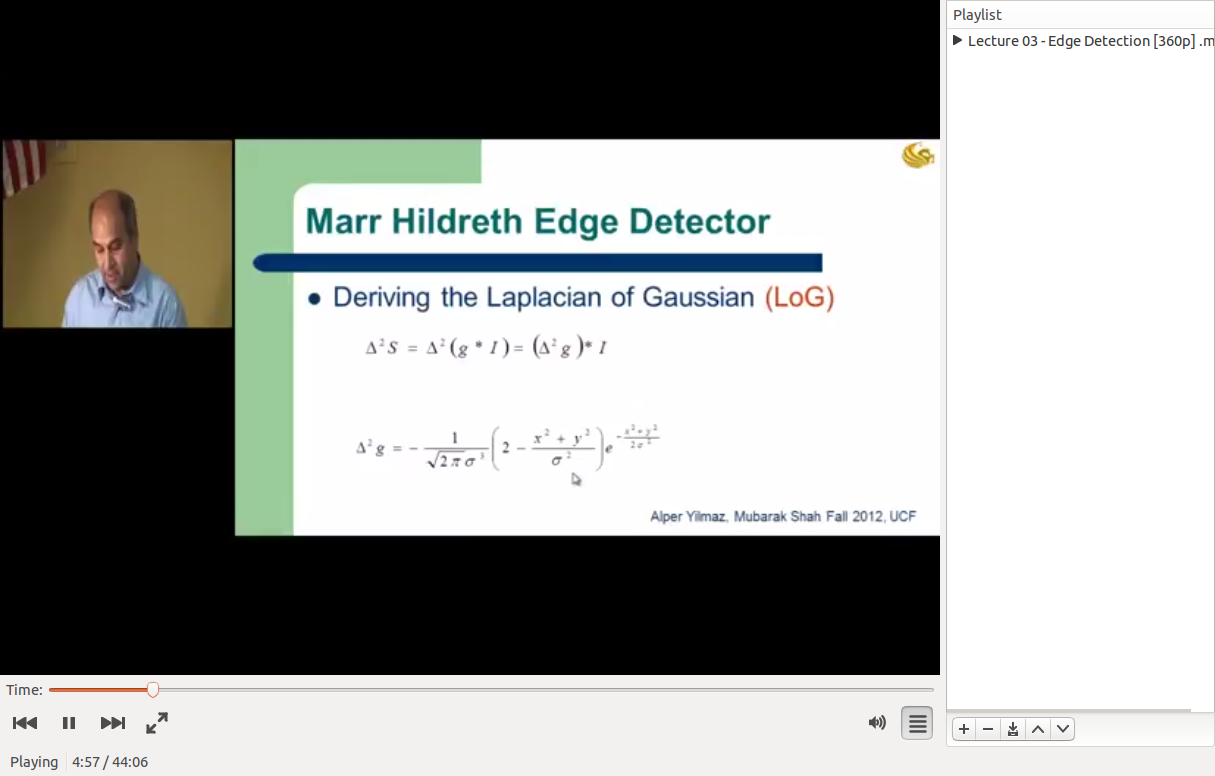
1. 先求gaussian的laplasian(Laplacian of the Gaussina,LoG) 当然, 这里也有固定的卷积模板可以代入
2. 对图像求LoG
就像下面这样 三角号代表Laplacian, g代表gaussian, I 代表image
截图视频来源
youtube , UCF 或
http://crcv.ucf.edu/videos/lectures/2012.php
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









