









1.背景知识
振动的国标和国际标准中仅仅可以查阅位移和速度的峰值,不会出现加速度指标。为什么呢?因为一些高频的振动往往体现为一种冲击性的信号,此时作用时间不定,这个指标很难给出。但是并不是不可能。下面常识根据现有资讯来推导相关的加速度阈值选项的参考值:
1.轴承振动
1.1 西交大数据集的参考(超限老化实验):
数据集关键字:XJTU-SY 轴承 数据集
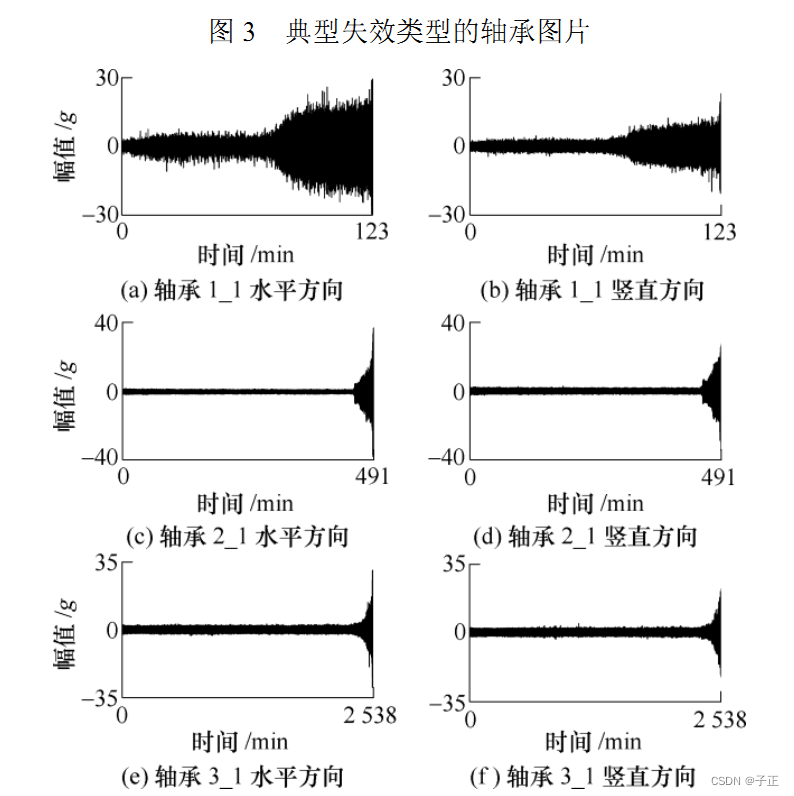 轴承的加速度峰值已经超过达到30G~50G的水准。为什么会这样吗?
轴承的加速度峰值已经超过达到30G~50G的水准。为什么会这样吗?
因为轴承四大可能损伤中,外圈内圈故障往往是点蚀,这种振动的作用时间往往很短,同样的力,作用时间越短,加速度越大。记得这个指标,这个轴承只有4cm,转速35转。加速度随转频的提升是线性的,在真实的环境中,轴承的转速往往只有17转以内,轴承故障,加速度与转速一般成正比,所以考虑侦测轴承故障,20G的加速度选择是可以的。
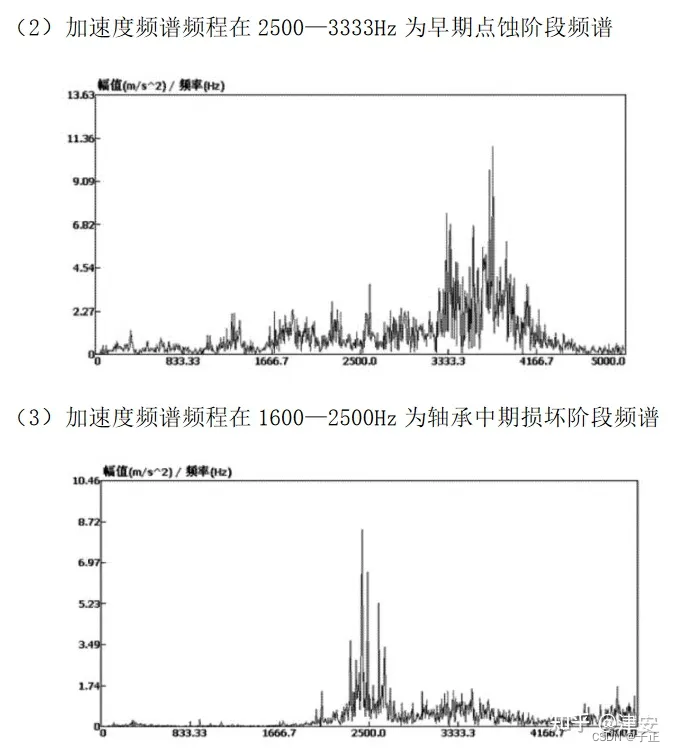
1.2 加速度四个阶段频率轴承故障诊断方法(CN 104833510)
现场实际使用时,轴承终末期阶段,加速度在3个G,此时的频点在500Hz左右。对照西交大的转频,是对应频率的1/4甚至更低。加速度理论上也应当缩减至原有的1/4。

其他配图参见附图,防止原始链接丢失。
如果以实际可能最高频率
按照上图中的信息,把振动传感器的量程设置在20g是比较合适的。
注意:轴承振动早期, 如果没有引起轴振动,振动限制在轴承本身,它能引发的振动是很微弱的。接下来我们对照标准来计算如果振动由轴法向振动引发,可能的烈度有多大。
2.机械体振动
机械体振动,在ISO 2372中分为三级,这个指标针对国内的技术水平可能偏高:
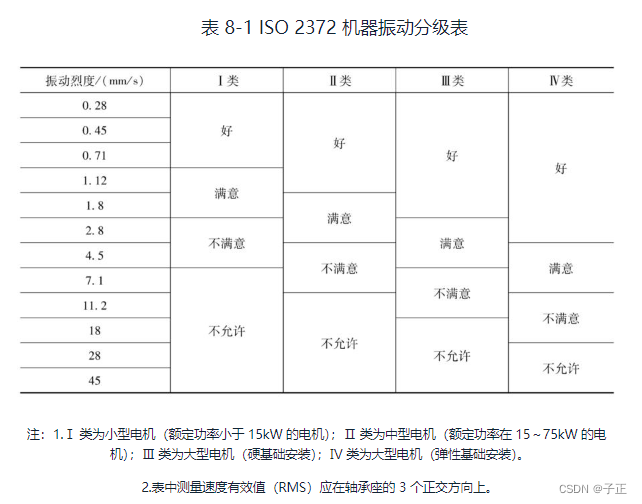
我们以75kW以上级电机的速度烈度门限值为例来说明:
弹性基础安装时的振动门限值为28mm/s
假定,这个振动由不平衡,不对中这类比较缓和的因素产生,假定当前振动转速是国产电机的最高转速3000rpm:
- 此时加速度相对匀速转动速度函数同为sin函数的形式,则如果幅度为1,时间持续1秒,则最高加速度会在0点出现,其值为1m/s^2
- 现在按照转速把时间轴压缩到1000rpm(中国制式供电50Hz,三级对儿),则相应加速度值提升到16.67倍。
- 此时如果峰值有1m/s,修正为28mm/s,则加速度缩减至28/(1*1000)
- 所以,综合的加速度为:28*16.67/1000 = 0.467 = 46.7e-3 g
转频降低,这个加速度的指标会更低。但是注意,振动往往体现为冲击性的特征,此时,加速度会因为作用力的持续时间更短,几乎会高出几个数量级。
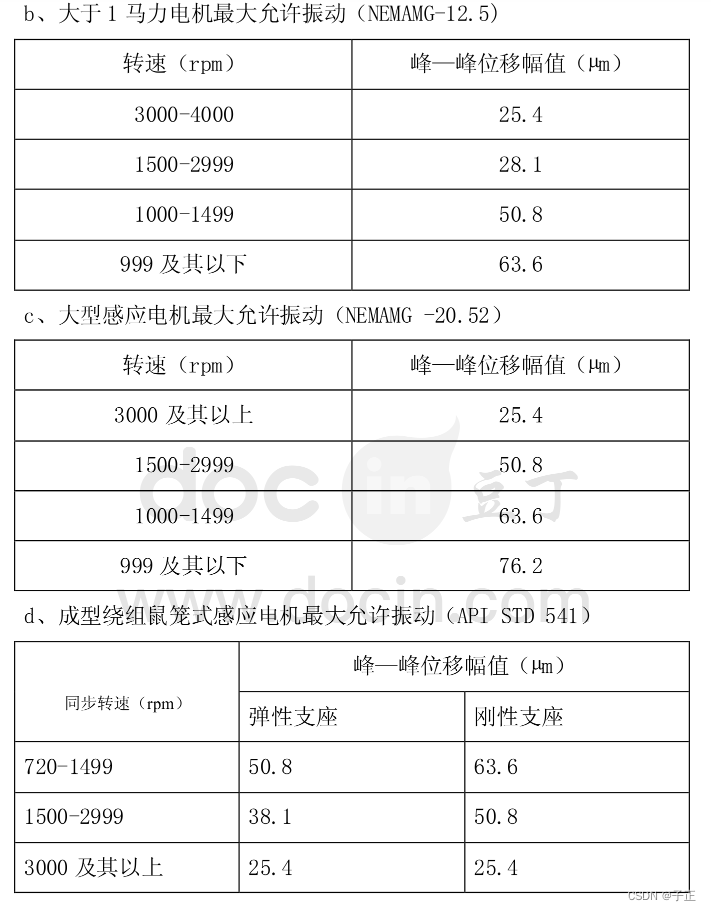
2.1 可以查询到的机械体振动加速度标准:
根据不同的行业和设备类型,振动加速度的标准也有所不同。以下是一些常见的标准:
1.电力设备:根据《电力设备维修技术规程》规定,一般情况下,振动加速度不应超过 2 g。
2.机床设备:根据国际标准 ISO 2372-1084,机床的振动加速度应小于 4.5 g。若超过此范围,则需要进行调整和维修。
3.风机设备:根据《风电机组技术要求规范》规定,风机设备的振动加速度应小于 1.5 g。
4.轴承设备:根据国际标准 ISO 10816-1-1995,轴承设备的振动加速度应不超过 2 g。
注意,这里的指标是刚刚偏离正常工作状态,需要检修的情况,实际上振动的烈度会更大。
2.2 理论计算
轴向振动有不对中和不平衡两种,相应的谱线出现在1倍频和2倍频位置,均为近似正弦波。我们首先推导加速度与速度的换算关系,参考如下数学模型:
2.2.1 加速度与速度换算公式
import numpy as np
import matplotlib.pyplot as plt
# 参数设置
A = 1.0 # 加速度信号的振幅
f = 1.0 # 信号频率 (Hz)*10000/7812
omega = 2 * np.pi * f # 角频率
T = 1 / f # 信号周期
Fs = 100 # 采样频率
dt = 1 / Fs # 采样间隔
t = np.arange(0, T, dt) # 时间向量
# 生成加速度信号 (正弦波)
acceleration = A * np.sin(omega * t)
# 对加速度信号进行积分,得到速度信号
velocity = np.cumsum(acceleration) * dt # 使用累积和近似积分
velocity -= np.mean(velocity) # 去除积分常数(以便速度从零开始)
# 绘制加速度和速度曲线
plt.figure(figsize=(12, 6))
# 加速度曲线
plt.subplot(2, 1, 1)
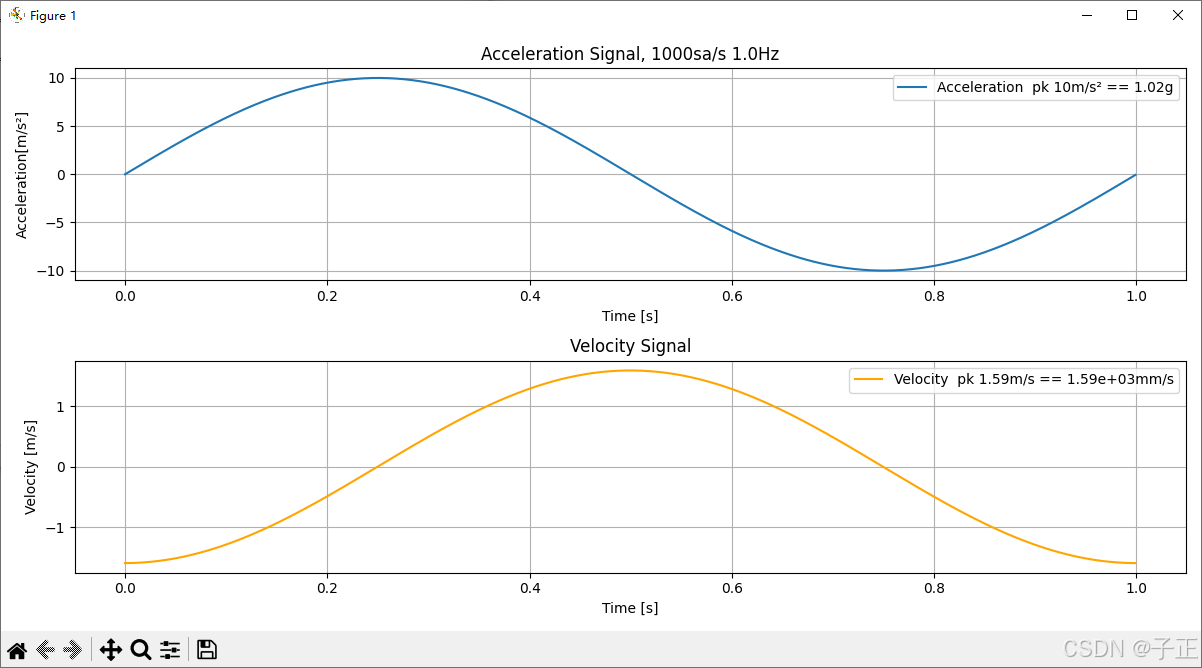
plt.plot(t, acceleration, label=f'Acceleration pk {A:.3g}m/s² == {A/9.8:.3g}g')
plt.title(f'Acceleration Signal, {Fs}sa/s {f}Hz')
plt.xlabel('Time [s]')
plt.ylabel(f'Acceleration[m/s²]')
plt.grid(True)
plt.legend()
# 速度曲线
plt.subplot(2, 1, 2)
plt.plot(t, velocity, label=f'Velocity pk {max(velocity):.3g}m/s == {max(velocity)*1000:.3g}mm/s', color='orange')
plt.title(f'Velocity Signal')
plt.xlabel('Time [s]')
plt.ylabel(f'Velocity [m/s]')
plt.grid(True)
plt.legend()
plt.tight_layout()
plt.show()
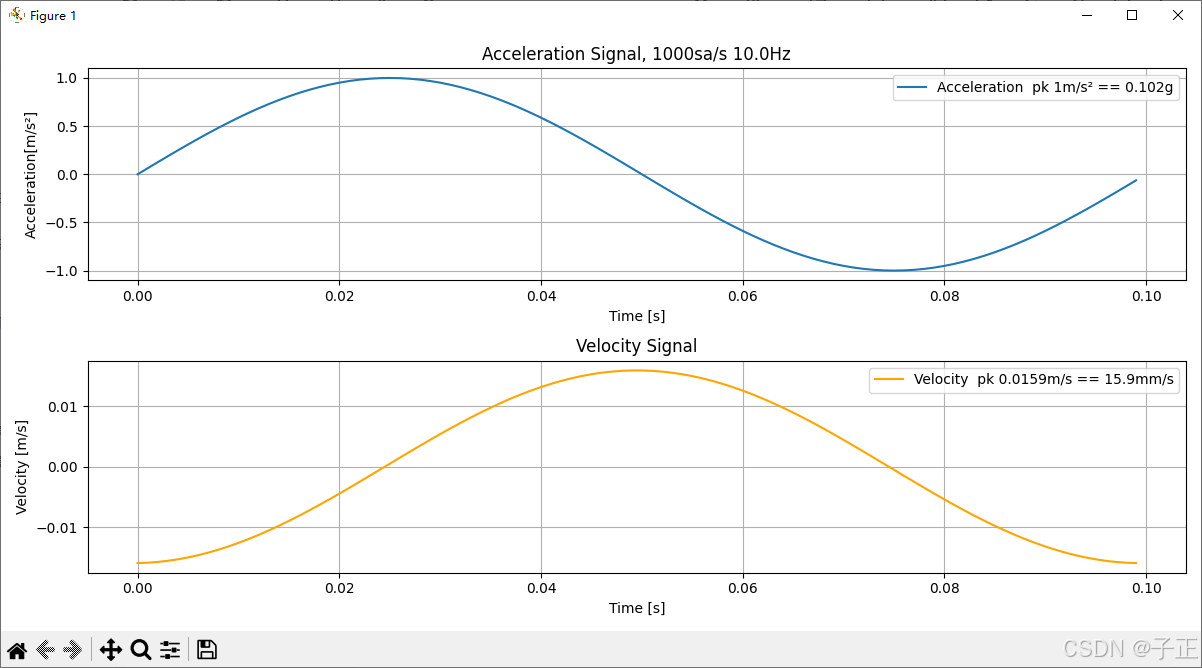
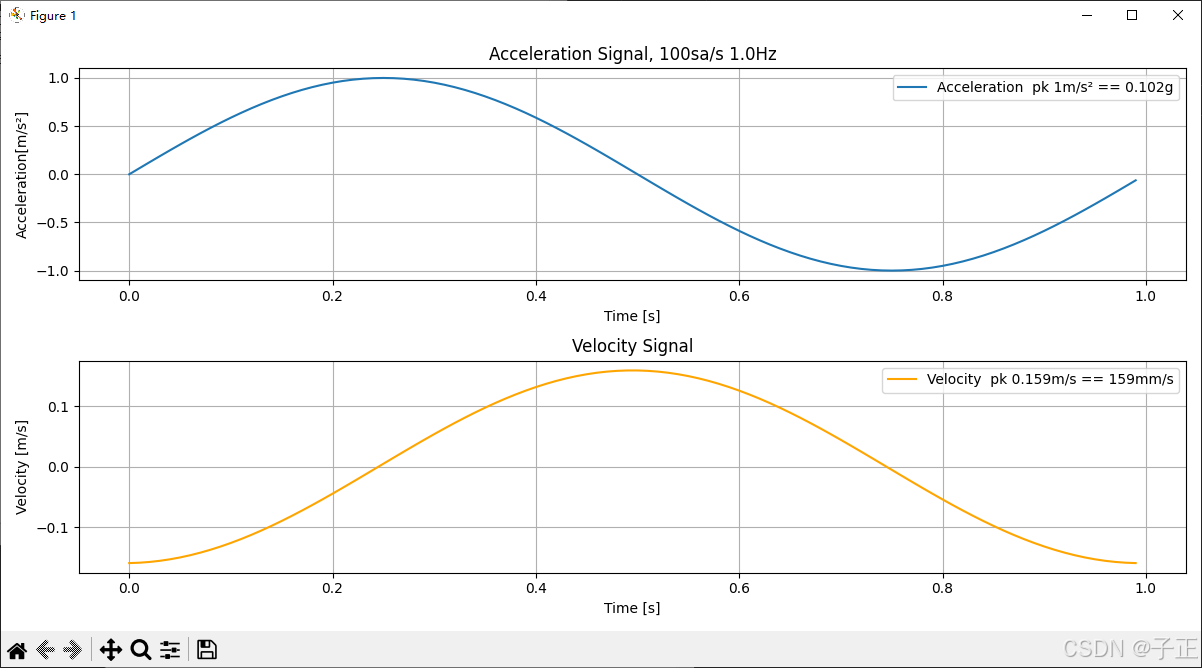 通过变换加速度信号频率,幅度,我们能得到如下基本结果:
通过变换加速度信号频率,幅度,我们能得到如下基本结果:
2.2.2 加速度速度转换的基本换算关系
- 振幅为pk =0.1g的1Hz正弦信号,积分后的速度峰值为: 159mm/s
- 其他参数不变,频率增大10倍:积分后的速度峰值减小10倍
- 其他参数不变,振幅增加10倍,积分后的速度峰值增大10倍
2.2.3 得到加速度
由速度反推,首先已知:pk=0.1g时,1Hz信号的转频,峰值速度为159mm/s
对于三极对电机,1000转左右,0.1g的加速度会对应0.159 mm/s的速度。
电机加速度换算比:1g == 0.53mm/s*极对数,
2.2.4 理论推导结论:
由2.1节机械振动标准核查:
轴不平衡引发的最大烈度的速度值最高在28左右,所以,对应的加速度量程:
单极对电机的极限加速度量程 = 28/0.53 = 52g,近似50g
3.信噪比和动态范围
在振动分析中,往往要在异常出现早期,即具有故障分析能力,此时,振动的特征谱线,往往是依赖于特定原始谱线,或者基于原始工作状态的一个比例值,
原始摘引:值得收藏的机械设备振动标准,太实用了(2) - 知乎

动态范围以为着要在振动的峰值范围内提供100倍的AD精度。注意往往在这个阶段,振动还没有恶化到上述阈值范围,所以,振动传感器的量化范围,至少要求9,10位甚至更靠上。
4 结论(<=20g,9Bits)
按最高功率电机,最高振动烈度解算,加速度的极限量程在50g左右。
建议的适应传统工业振动监测的传感器,推荐的加速度量程:
对于75KW以上级电机是:不高于20g.(按转频1000Hz计算)
15KW电机,转频不变,仍然不可低于20g.
考虑动态范围至少选择9位AD以上的。
附录A 一组振动阈值摘要:
这种震动的测量值区间:
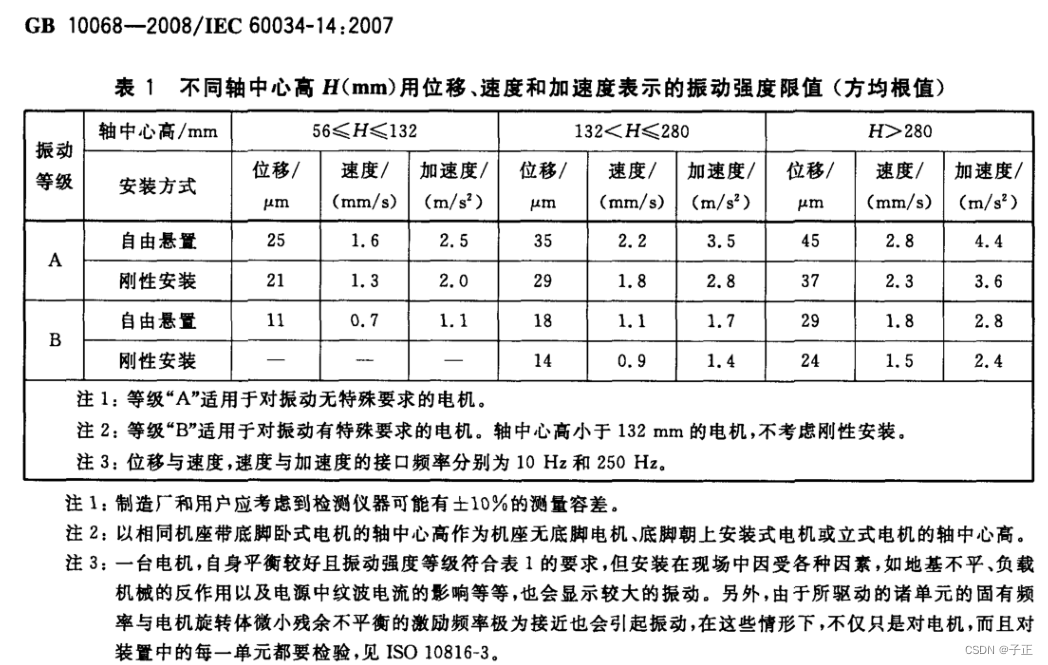
GB10068-2008的加速度值仅针对电机,它的振动水平影响了整个机械组合体的振动水平,所以这个允许的振动范围是比较小的:
不过,如果位移是45um,这个位移可能指PkPk,那么速度 = 45e-6/(1/50*3/2) = 1.5 mm/s 奇怪,这里与GB10068-2008差1倍。加速度 = 1.5e-3/s(1/50*3/4) = 0.1m/S^2, 这个值与GB10068-2008差40倍。不知道为什么。可能它考虑了振动的基本特征是冲击响应的形式。
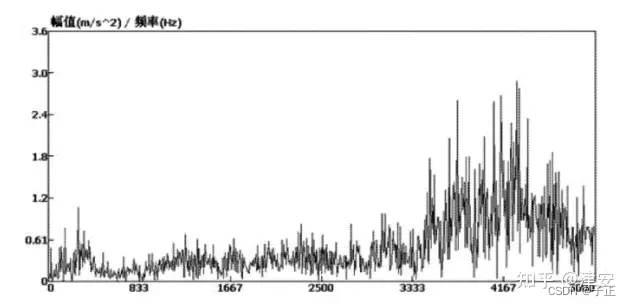
附录B:实际使用环境,轴承振动的渐进式恶化过程
1) 加速度频谱频程在 3333—5000Hz 为早期贪油阶段
附录C 加速度 - 速度积分数学模型输出值:
C.1 其他参数不变,转速增大10倍,速度降低10倍。成反比。
 C.2 其他参数不变,加速度增大10倍,速度增加10倍。成正比。
C.2 其他参数不变,加速度增大10倍,速度增加10倍。成正比。
附录D 电机书输出轴切向力大小计算公式:
import math
def calculate_axial_force(power_kw, speed_rpm, shaft_diameter_mm):
# 假设额定功率、额定转速和轴径
# 电机功率 (功率需要转换为瓦特)
power_watt = power_kw * 1000
# 轴转速 (转速可以直接使用)
speed_rpm = speed_rpm
# 轴径 (以米为单位)
shaft_diameter_m = shaft_diameter_mm / 1000
# 示例计算,实际计算需要考虑更多因素
# 假设轴向力与功率和转速有关的一个简单模型
# 这只是一个假设示例,具体计算需参考实际工程设计规范
axial_force_newton = power_watt / ((speed_rpm/60) * (shaft_diameter_m*3.14))
return axial_force_newton
# 电机参数
power_kw = 15
speed_rpm = 970
shaft_diameter_mm = 48
# 计算轴向力
axial_force = calculate_axial_force(power_kw, speed_rpm, shaft_diameter_mm)
print(f"计算得到的轴向力为: {axial_force:.2f} 牛顿")
附录 E 一个失败的加速度速度推算
合适的推理过程参见:2.3.3
对于电机而言,15KW,17KW 3极对儿电机的典型输出扭矩换算到电机输出轴的切向力大小分别为:
- 15kW...........970转.......轴径48mm..........最大扭矩可以达到额定扭矩2.1倍。
- 75kW...........985转.......65mm..................最大扭矩2.0倍;
15kW的额定切向力为:Fq = 15*e3/((970/60*.3.14) *1000/48) = 6156牛
75KW的额定切向力为:Fq = 75*e3/((985/60*.3.14) *1000/48) = 22383.77牛
现场使用时的极限工况会加倍。
那么在输出轴上如果出现问题,可能的最大加速度为
F = ma,根据反作用原理,这个力会作用到到轴+转子这个部件上。
《终止》


















 1878
1878

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











