







概述:
根据控制方式舵机应该称为微型伺服马达。早期在模型上使用最多,主要用于控制模型的舵面,所以俗称舵机。舵机特点是接受一个简单的控制指令就可以自动转到一个比较精确的角度。
注:
微型伺服马达:一个微型伺服马达内部包括了一个小型直流马达;一组变速齿轮组;一个反馈可调电位器;及一块电子控制板。其中,高速转动的直流马达提供了原始动力,带动变速(减速)齿轮组,使之产生高扭力的输出,齿轮组的变速比愈大,伺服马达的输出扭力也愈大,也就是说越能承受更大的重量,但转动的速度也愈低。

原文链接:
1、舵机的结构:
舵机简单的说就是集成了直流电机、电机控制器和减速器等,并封装在一个便于安装的外壳里的伺服单元。能够利用简单的输入信号比较精确的转动给定角度的电机系统。舵机安装了一个电位器(或其他角度器)检测输出轴转动角度,控制板根据电位器的信息能比较精确的控制和保持输出轴的角度。这样的直流电机控制方式叫闭环控制。
舵机的主体结构如图所示:

注:
伺服:在讯号来到之前,转子静止不动;讯号来到之后,转子立即转动;当讯号消失,转子能即时自行停转。由于它的“伺服”性能,因此而得名——伺服系统
闭环控制:闭环控制是指控制论的一个基本概念。指作为被控的输出量以一定方式返回到作为控制的输入端,并对输入端施加控制影响的一种控制关系。带有反馈信息的系统控制方式。
2、舵机参数:
2.1舵机转速:
舵机无负载的情况下转过60°角所用的时间
2.2舵机的转矩:
在舵盘上距离舵盘机轴中心水平距离1cm处,舵机能够带动的物体重量。如图所示。

2.3工作电压:
一般推荐使用4.8V和6V两种工作状态,舵机的工作电压对;性能有着重大的影响。
3.舵机的工作原理:
如上述的备注所介绍。舵机是一个微型伺服控制系统,使用闭环控制。具体工作原理如图。
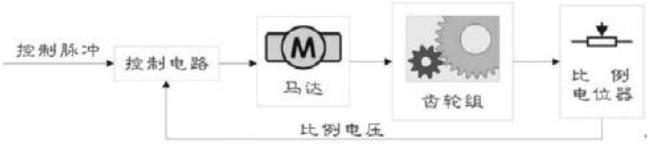
工作原理是控制电路接收信号源的控制脉冲,并驱动电机转动;齿轮组将电机的速度成大倍数缩小,并将电机的输出扭矩放大响应倍数,然后输出;电位器.和齿轮组的末级一起转动,测量舵机轴转动角度;电路板检测并根据电位器判断舵机转动角度,然后控制舵机转动到目标角度或保持在目标角度。模拟舵机需要.一个外部控制器(遥控器的接收机或者单片机)产生脉宽调制信号来告诉舵机转动角度,脉冲宽度是舵机控制器所需的编码信息。舵机的控制脉冲周期20ms,脉宽从0.5ms-2.5ms,分别对应-90度到+90度的位置(对于180°舵机)。如下图.所示:

需要解释的是舵机原来主要用在飞机、汽车、船只模型上,作为方向舵的调节和控制装置。所以,一般的转动范围是45°、60°或者90°,这时候脉冲宽度一般只有1ms-2ms之间。而后舵机开始在机器人上得到大幅度的运用,转动的角度也在根据机器人关节的需要增加到-90°至90°之间,甚至还有-135°至135°之间,脉冲宽度也随之有了变化。对与机器人控制而言,我们一般通过单片机产生PWM信号控制舵机。















 1013
1013











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









