







本文代码使用 HAL 库。
前言
- 实验小车:STM32F103C8T6。
- 舵机模块:SG90 。
- 所需软件:keil5 , cubeMX 。
- 实验目的:学习如何使用舵机模块。
一、舵机模块介绍
SG90 舵机通常也称为 伺服马达 。舵机是一种能够控制角度的电机,通过给定的控制信号,可以使舵机转到特定的角度位置,并且能够保持该位置稳定。舵机通常用于控制机械臂、模型车、航模以及其他需要精确控制角度位置的应用中。
引脚介绍:
SG90舵机上有三根线,分别是GND(棕色线)、VCC(红色线)和SIG(黄色线)也就是信号线。
二,工作原理
1. 控制原理:
控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。它内部有一个基准电路,产生周期为 20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最后,电压差的正负输出到电机驱动芯片决定电机的正反转。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。

2. 控制舵机:
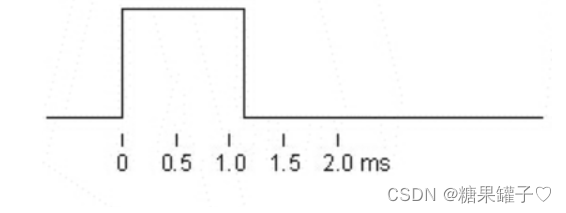
大多数标准舵机的转角确实在0到180度之间。舵机的控制一般需要一个 20ms 左右的时基脉冲,该脉冲的高电平部分一般为 0.5ms ~ 2.5 ms 范围内的角度控制脉冲部分。以 180 度角度伺服为例,那么对应的控制关系时这样的。
舵机的转角度 依赖于 占空比:
0.5ms -------------- 0度;-------------- 0.5ms/20ms = 2.5% ( 占空比 % )
1.0ms ------------ 45度;-------------- 1ms/20ms = 5%
1.5ms ------------ 90度;-------------- 1.5ms/20ms = 7.5%
2.0ms ----------- 135度;-------------- 2.0ms/20ms = 10%
2.5ms ----------- 180度;-------------- 2.5ms/20ms = 12.5%
-
占空比 = 高电平时间 / 总周期 =============> CCR / ARR .
-
CCR :比较寄存器值。
-
ARR : 自动重装载值。
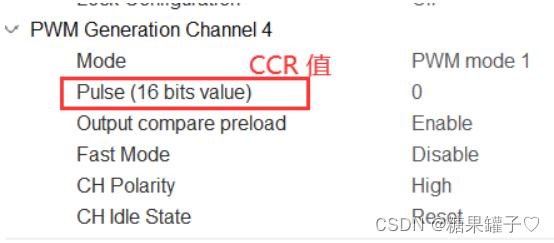
3.可在 cubeMX 中可设置初始占空比:
- 设置 CCR (比较寄存器值):
-
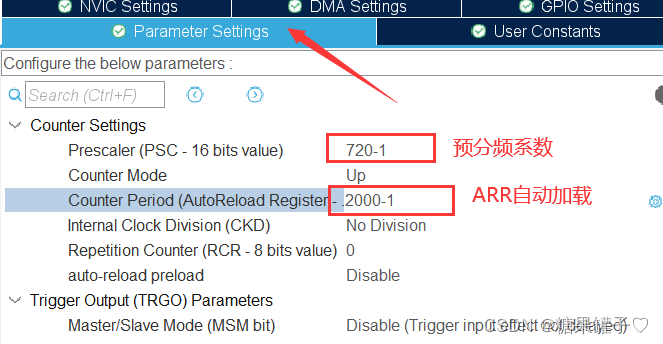
设置 ARR (自动加载值) :
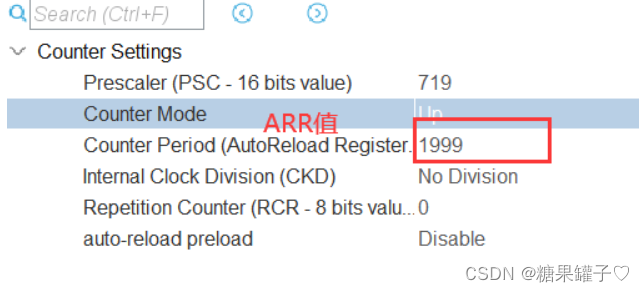
由于在 cubeMX 中已经将 ARR 设置为 2000,所以 :0 度 -----------------> 占空比为 2.5% (0.5ms/20ms = 2.5%)-------------> CCR=2000*2.5%= 50 45 度 -----------------> 占空比为 5% -------------> CCR=2000*5%= 100 90 度 -----------------> 占空比为 7.5% -------------> CCR=2000*7.5%= 150 135 度 -----------------> 占空比为 10% -------------> CCR=2000*10%= 200 180 度 -----------------> 占空比为 12.5% -------------> CCR=2000*12.5%= 250
三,原理图分析
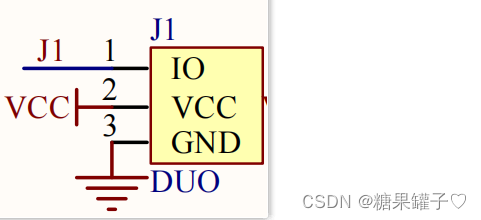
SG90 舵机模块 :
有 3 个引脚,分别是 VCC, GND, J1(信号线)
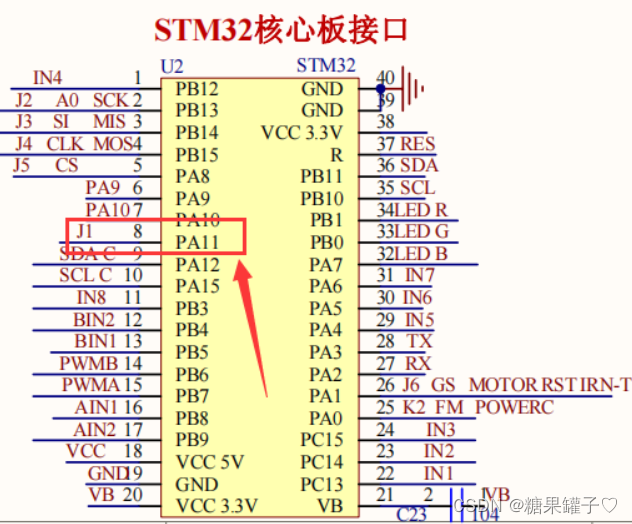
stm32 驱动地板电路图:
舵机模块接到了开发板的 J1 接口----------------> PA11。
四,cubeMX 配置
-
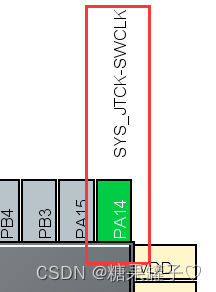
设置 引脚,将 PA14 设置为 TIM1 通道4功能。
-
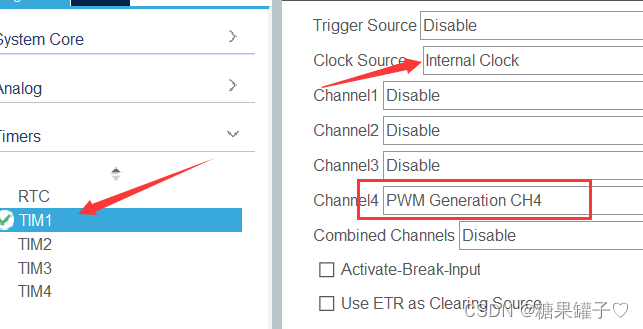
选择 定时器1通道
-
设置定时器参数:
定时周期 = (定时器预分频系数 PSC + 1) * (重装载值 ARR + 1) / 时钟主频。
这里我设置的定时周期是 20ms .
五,编写代码
舵机从0°一直转到到180° :
/* 开启 TIM1 通道4 */
HAL_TIM_PWM_Start(&htim1,TIM_CHANNEL_4);
/*
* 设置 CCR
* 占空比 = CCR / ARR.
* ARR 在 cubeMX 中配置为了 2000(固定了)
*/
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_4,50); // 0° ,CCR = 50
HAL_Delay(1000);
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_4,100); // 45°, CCR = 100
HAL_Delay(1000);
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_4,150); // 90° , CCR = 150
HAL_Delay(1000);
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_4,200); // 135° , CCR = 200
HAL_Delay(1000);
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_4,250); // 180° , CCR = 250
HAL_Delay(1000);
总结
下篇文章为大家介绍 智能小车循迹。















 1927
1927











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











