






本文主要探讨210的I2C相关知识。
I2C
物理接口:SCL + SDA
SCL:时钟线传输CLK信号(KHz)
SDA: 数据线传输通信数据
通信特征:串行、同步、非差分、低速率
主设备发起通信,从设备按照I2C协议接受信息并响应
同一设备可以是主设备,也可是从设备
主设备可挂载多从设备(主从地址唯一)在总线上,实现一对多通信,但同一时间内主设备只能和一台从设备通信
用途:SoC和外设间通信(EEPROM、sensor)

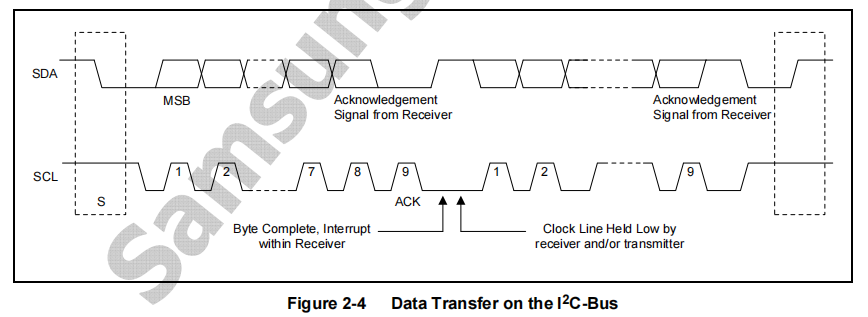
I2C通信时序
时序:通信线上按时间顺序电平发生变化且变化对通信具有意义
I2C总线状态:空闲状态、忙态
两相邻通信周期间是空闲态(其余忙态),通信周期由起始位开始,结,中间为通信数据
起始是时间段:SCL维持高电平,SDA由高到低
结束是时间段:SCL维持高电平,SDA由低到高


210的I2C
主设备在一通信周期广播发送8位从设备地址(7位从地址,1位表示读写,0主写1主接收)到总线,对应从设备响应
发送方发送一段数据,接收方接收数据响应ACK(1bit),无响应则未收到
I2C通信时每次传输有效数据都1个字节(8位)
移位寄存器将数据一位位从SDA线上去发送/接收
时钟源是PCLK_PSYS,内部分频得到I2C控制器CLK,通过SCL线传给从设备


210的I2C寄存器(SoC)

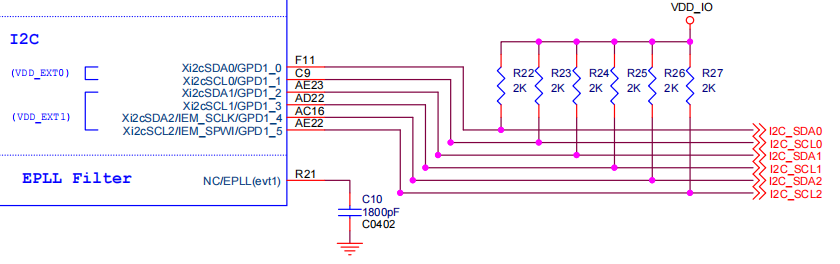
gpio


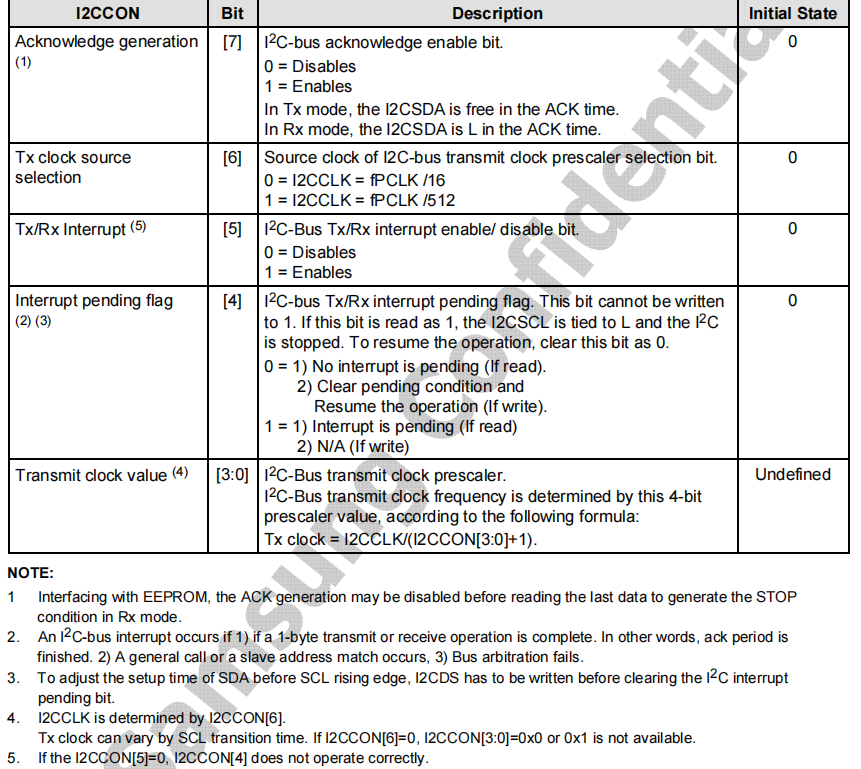
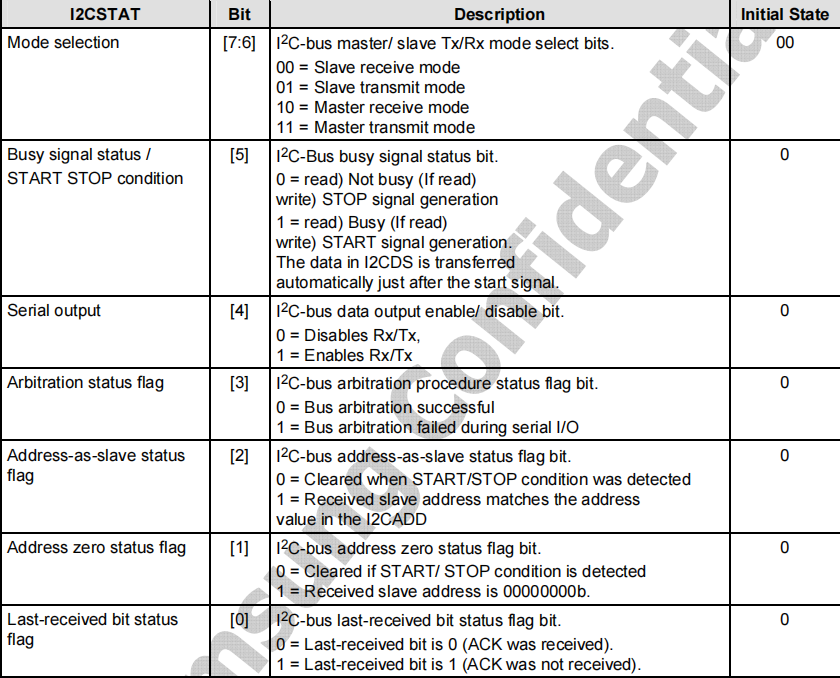
I2CCON + I2CSTAT:产生通信时序,I2C接口配置 ,时钟一级分频I2CCON的bit6(等于PCLK/16或者PCLK/512)二级分频系数为[1,16]:65000KHz/512/4=31KHz
I2CADD:从设备地址

I2CDS:发送/接收数据区

210的gsensor(KXTE9)
gsensor供电由PWMTOUT3控制,低电平不工作,高电平工作
gsensor的SDA和SCL接S5PV210的I2C端口0
KXTE9的I2C地址为0b0001111(0x0f),最高支持400KHz
主设备读取gsensor信息时SAD是:0b00011111(0x1F),读时SAD应该是:0b00011110(0x1E)
寄存器

CT_RESP (0x0C)
默认为0x55,当把CTRL_3的bit4为1,读取0xAA,第二次读自动变为0x55,用于测试通信是否成功
CTRL_1 (0x1B)
写入0x98,KXTE9 为操作模式(默认为待机),数据传输速率设为40Hz
CTRL_3 (0x1D)
CTRL_3的bit4为1,读取CT_RESP得到0xAA,第二次读自动变为0x55,用于测试通信是否成功
流程

210的I2C通信流程
主发送

主接收

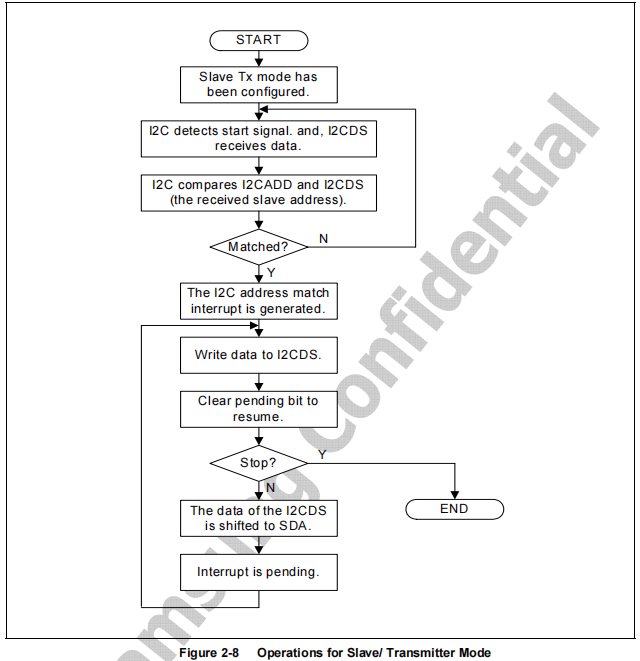
从发送( gsensor)

从接收( gsensor)
I2C通信功能(主)
I2C控制器初始化:s3c24xx_i2c_init(初始化GPIO,设置IRQEN和ACKEN、设置时钟)
/* s3c24xx_i2c_init
*
* initialise the controller, set the IO lines and frequency
*/
static int s3c24xx_i2c_init(struct s3c24xx_i2c *i2c)
{
unsigned long iicon = S3C2410_IICCON_IRQEN | S3C2410_IICCON_ACKEN;
struct s3c2410_platform_i2c *pdata;
unsigned int freq;
/* get the plafrom data */
pdata = i2c->dev->platform_data;
/* inititalise the gpio */
if (pdata->cfg_gpio)
pdata->cfg_gpio(to_platform_device(i2c->dev));
/* write slave address */
writeb(pdata->slave_addr, i2c->regs + S3C2410_IICADD);
dev_dbg(i2c->dev, "slave address 0x%02x\n", pdata->slave_addr);
writel(iicon, i2c->regs + S3C2410_IICCON);
/* we need to work out the divisors for the clock... */
if (s3c24xx_i2c_clockrate(i2c, &freq) != 0) {
writel(0, i2c->regs + S3C2410_IICCON);
dev_err(i2c->dev, "cannot meet bus frequency required\n");
return -EINVAL;
}
/* todo - check that the i2c lines aren't being dragged anywhere */
dev_dbg(i2c->dev, "bus frequency set to %d KHz\n", freq);
dev_dbg(i2c->dev, "S3C2410_IICCON=0x%02lx\n", iicon);
dev_dbg(i2c->dev, "S3C2440_IICLC=%08x\n", pdata->sda_delay);
writel(pdata->sda_delay, i2c->regs + S3C2440_IICLC);
return 0;
}
I2C控制器开始读写:s3c24xx_i2c_message_start
/* s3c24xx_i2c_message_start
*
* put the start of a message onto the bus
*/
static void s3c24xx_i2c_message_start(struct s3c24xx_i2c *i2c,
struct i2c_msg *msg)
{
unsigned int addr = (msg->addr & 0x7f) << 1;
unsigned long stat;
unsigned long iiccon;
stat = 0;
stat |= S3C2410_IICSTAT_TXRXEN;
if (msg->flags & I2C_M_RD) {
stat |= S3C2410_IICSTAT_MASTER_RX;
addr |= 1;
} else
stat |= S3C2410_IICSTAT_MASTER_TX;
if (msg->flags & I2C_M_REV_DIR_ADDR)
addr ^= 1;
/* todo - check for wether ack wanted or not */
s3c24xx_i2c_enable_ack(i2c);
iiccon = readl(i2c->regs + S3C2410_IICCON);
writel(stat, i2c->regs + S3C2410_IICSTAT);
dev_dbg(i2c->dev, "START: %08lx to IICSTAT, %02x to DS\n", stat, addr);
writeb(addr, i2c->regs + S3C2410_IICDS);
/* delay here to ensure the data byte has gotten onto the bus
* before the transaction is started */
ndelay(i2c->tx_setup);
dev_dbg(i2c->dev, "iiccon, %08lx\n", iiccon);
writel(iiccon, i2c->regs + S3C2410_IICCON);
stat |= S3C2410_IICSTAT_START;
writel(stat, i2c->regs + S3C2410_IICSTAT);
}
I2C控制器结束读写:s3c24xx_i2c_stop
static inline void s3c24xx_i2c_stop(struct s3c24xx_i2c *i2c, int ret)
{
unsigned long iicstat = readl(i2c->regs + S3C2410_IICSTAT);
dev_dbg(i2c->dev, "STOP\n");
/* stop the transfer */
iicstat &= ~S3C2410_IICSTAT_START;
writel(iicstat, i2c->regs + S3C2410_IICSTAT);
i2c->state = STATE_STOP;
s3c24xx_i2c_master_complete(i2c, ret);
s3c24xx_i2c_disable_irq(i2c);
}demo:
编写i2c读写
start.S
#define WTCON 0xE2700000
#define SVC_STACK 0xd0037d80
.global _start
_start:
//close watchDog
ldr r0,=WTCON
ldr r1,=0x0
str r1,[r0]
//init SVC stack
ldr sp,=SVC_STACK
//init icache
mrc p15,0,r0,c1,c0,0
bic r0,r0,#(1<<12) //close icache
orr r0,r0,#(1<<12) //open icache
mcr p15,0,r0,c1,c0,0
//use func
bl main
b .main.c
#include "i2c_gsensor.h"
#include "uart_printf.h"
int main()
{
//init uart
init_uart();
//init i2c
i2c_init();
//read and write i2c
gsensor_read_write();
return 0;
}uart_printf.h
void init_uart();uart_printf.c
#define GPA0CON 0xE0200000
#define ULCON0 0xE2900000
#define UCON0 0xE2900004
#define UFCON0 0xE2900008
#define UMCON0 0xE290000C
#define UTRSTAT0 0xE2900010
#define UTXH0 0xE2900020
#define URXH0 0xE2900024
#define UBRDIV0 0xE2900028
#define UDIVSLOT0 0xE290002C
#define rGPA0CON (*(volatile unsigned int *)GPA0CON)
#define rULCON0 (*(volatile unsigned int *)ULCON0)
#define rUCON0 (*(volatile unsigned int *)UCON0)
#define rUFCON0 (*(volatile unsigned int *)UFCON0)
#define rUMCON0 (*(volatile unsigned int *)UMCON0)
#define rUTRSTAT0 (*(volatile unsigned int *)UTRSTAT0)
#define rUTXH0 (*(volatile unsigned int *)UTXH0)
#define rURXH0 (*(volatile unsigned int *)URXH0)
#define rUBRDIV0 (*(volatile unsigned int *)UBRDIV0)
#define rUDIVSLOT0 (*(volatile unsigned int *)UDIVSLOT0)
//init uart
void init_uart()
{
//set gpio as uart(rx,tx)
rGPA0CON &= ~(0xff);
rGPA0CON |= ((1<<2)|(1<<5));
//set uart base configure(mode)
rULCON0 = 0x3;
rUCON0 = 0x5;
rUMCON0 = 0;
rUFCON0 = 0;
//set uart baud
//DIV_VAL = (PCLK / (bps x 16))-1
//(66000000 /(115200 * 16)) -1 = 34.8
rUBRDIV0 = 34;
//set uart baud calibration
//0.8 * 16 = 13,check 210 table
rUDIVSLOT0 = 0xdfdd;
}
//send data
void putc(char data)
{
while (!(rUTRSTAT0 & (1<<1)));
rUTXH0 = data;
}
//receive data
char getc()
{
while (!(rUTRSTAT0 & (1<<0)));
return (rURXH0 & 0xff);
}i2c_gsensor.h
void i2c_init();
void gsensor_read_write();i2c_gsensor.c
#include "uart_printf.h"
#include "stdio.h"
#define GPD1CON 0xE02000C0
#define rGPD1CON (*(volatile unsigned int *)0xE02000C0)
#define I2CCON0 0xE1800000
#define I2CSTAT0 0xE1800004
#define I2CADD0 0xE1800008
#define I2CDS0 0xE180000C
#define rI2CCON0 (*(volatile unsigned int *)0xE1800000)
#define rI2CSTAT0 (*(volatile unsigned int *)0xE1800004)
#define rI2CADD0 (*(volatile unsigned int *)0xE1800008)
#define rI2CDS0 (*(volatile unsigned int *)0xE180000C)
#define WRITE_GSENSOR 0x1E
#define READ_GSENSOR 0x1F
#define CT_RESP_ADDR 0x0C
#define CTRL_REG2_ADDR 0x1C
static void dealy_time()
{
volatile unsigned int num = 100;
while(num--);
}
void i2c_init()
{
printf("start i2c init\r\n");
//set gpio as i2c output
rGPD1CON &= ~(0xff);
rGPD1CON |= (0x22);
//enable interrupt
rI2CCON0 |= (1<<5);
//set i2c clock,65Mhz / 512 /2 = 31Khz
rI2CCON0 |= (1<<6);
rI2CCON0 &= ~(0x0f);
rI2CCON0 |= (1<<0);
//enable serial output
rI2CSTAT0 |= (1<<4);
printf("i2c init end\r\n");
}
static void i2c_start_send_get(int num)
{
//enable ack
rI2CCON0 |= (1<<7);
//judge send or get ,0 is send,1 is get
if(num == 0)
{
//send gsensor addr and mode(read or read)
rI2CDS0 = WRITE_GSENSOR;
//start send
rI2CSTAT0 = 0xF0;
}
else
{
//send gsensor addr and mode(read or read)
rI2CDS0 = READ_GSENSOR;
//start send
rI2CSTAT0 = 0xB0;
}
//hang on interrupt
while((rI2CCON0 & (1<<4)) == 0);
dealy_time();
}
static void i2c_restart_send_get(int num)
{
//judge send or get ,0 is send,1 is get
if(num == 0)
{
//send gsensor addr and mode(read or read)
rI2CDS0 = WRITE_GSENSOR;
//start send
rI2CSTAT0 = 0xF0;
}
else
{
//send gsensor addr and mode(read or read)
rI2CDS0 = READ_GSENSOR;
//start send
rI2CSTAT0 = 0xB0;
}
//clear interrupt
rI2CCON0 &= ~(1<<4);
//hang on interrupt
while((rI2CCON0 & (1<<4)) == 0);
dealy_time();
}
static void i2c_send(unsigned char data)
{
rI2CDS0 = data;
//clear interrupt
rI2CCON0 &= ~(1<<4);
//hang on interrupt
while((rI2CCON0 & (1<<4)) == 0)
dealy_time();
}
static unsigned char i2c_get()
{
//disable ack
rI2CCON0 &= ~(1<<7);
//clear interrupt
rI2CCON0 &= ~(1<<4);
//hang on interrupt
while((rI2CCON0 & (1<<4)) == 0);
dealy_time();
return rI2CDS0;
}
static void i2c_stop_send_get(int num)
{
//judge send or get ,0 is send,1 is get
if(num == 0)
{
rI2CSTAT0 = 0xD0;
}
else
{
rI2CSTAT0 = 0x90;
}
//clear interrupt
rI2CCON0 &= ~(1<<4);
dealy_time();
}
void gsensor_read_write()
{
printf("start read\r\n");
volatile unsigned char get = 0;
i2c_start_send_get(0);
i2c_send(CT_RESP_ADDR);
i2c_restart_send_get(1);
get = i2c_get();
i2c_stop_send_get(0);
printf("CT_RESP :0x%x\r\n",get);
printf("start read end\r\n",get);
printf("start write end\r\n",get);
i2c_start_send_get(0);
i2c_send(CTRL_REG2_ADDR);
i2c_restart_send_get(1);
get = i2c_get();
i2c_stop_send_get(0);
printf("before wrtie ,CTRL_REG2 :0x%x\r\n",get);
printf("wrting 0xbc to CTRL_REG2\r\n");
i2c_start_send_get(0);
i2c_send(CTRL_REG2_ADDR);
i2c_send(0xbc);
i2c_restart_send_get(1);
i2c_start_send_get(0);
i2c_send(CTRL_REG2_ADDR);
i2c_restart_send_get(1);
get = i2c_get();
i2c_stop_send_get(0);
printf("after wrtied,CTRL_REG2 :0x%x\r\n",get);
}
link.lds
SECTIONS
{
. = 0xd0020010;
.text :
{
start.o
* (.text)
}
.data :
{
* (.data)
}
bss_start = .;
.bss :
{
* (.bss)
}
}Makefile
CC = arm-linux-gcc
LD = arm-linux-ld
OBJCOPY = arm-linux-objcopy
OBJDUMP = arm-linux-objdump
INCDIR := $(shell pwd)
#预处理器的flag,flag就是编译器可选的选项
CPPFLAGS := -nostdlib -nostdinc -I$(INCDIR)/include
#C编译器的flag
CFLAGS := -Wall -O2 -fno-builtin
export CC LD OBJCOPY OBJDUMP CPPFLAGS CFLAGS
objs := start.o uart_printf.o main.o i2c_gsensor.o
objs += lib/libc.a
led.bin:$(objs)
$(LD) -Tlink.lds -o i2c.elf $^
$(OBJCOPY) -O binary i2c.elf i2c.bin
$(OBJDUMP) -D i2c.elf > i2c.dis
gcc mkv210.c -o mkv210
./mkv210 i2c.bin sd.bin
lib/libc.a:
cd lib; make; cd ..
%.o:%.S
$(CC) $(CPPFLAGS) $(CFLAGS) -o $@ $< -c
%.o:%.c
$(CC) $(CPPFLAGS) $(CFLAGS) -o $@ $< -c
clean:
rm *.o *.elf *.bin *.dis mkv210 -f
cd lib; make clean; cd ..文件示例:

结果示例:















 2007
2007











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









