







图(Graph)
1、概念
(1)图的定义
- 图是由两个集合组成V、E,记为G=(V,E)。
- V是顶点(数据元素)的有穷非空集合
- E是顶点偶对的有穷集合,这些点偶对称为边
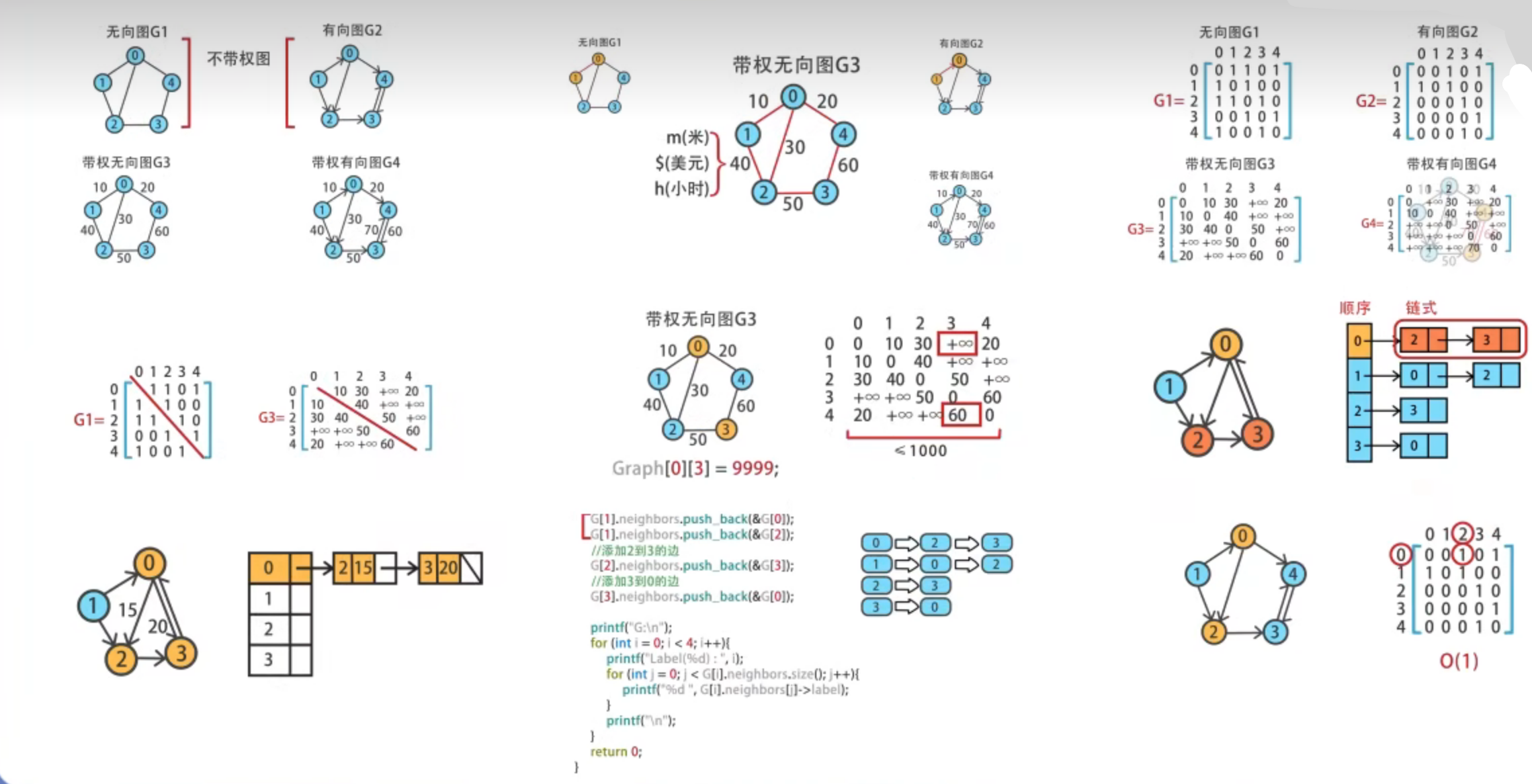
- 无向图:每条边都是没有方向的图,没有箭头
- 有向图:如上,反之。每条边都是有方向的图
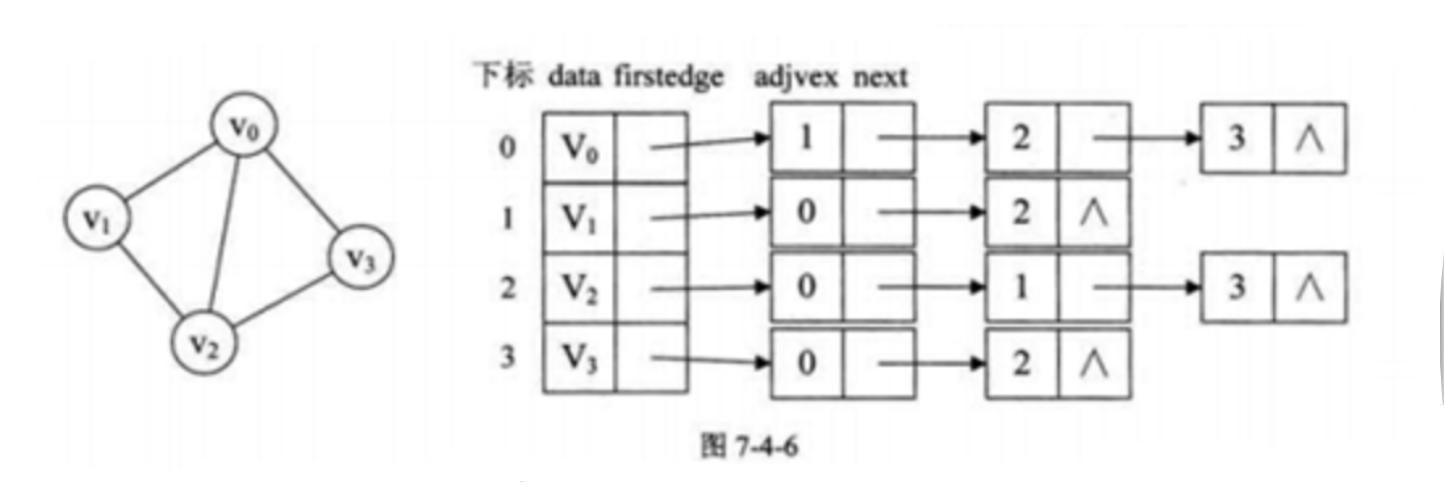
- 顶点个数=表头结点个数
- 边数=2倍表结点数

(2)基本术语
- 子图:

-
简单图: 如上图G1、G2都是
- 不存在重复边
- 不存在顶点的自身的边
-
多重图:
- 若图G中某两个结点之间的边数多于一条,又允许顶点通过同一条边和自己关联,则G为多重图。多重图的定义和简单图是相对的
-
完全图(也称简单完全图)

-
稀疏图和稠密图
- 边或弧的个数e < n logn的图为稀疏图,否则稠密图。(n为图的数量)
-
权和网
- 图中的边可标上具有某种含义的数值,该数值称为边上的权
- AOV网是有向完全图
-
有权图与无权图
如果图中的边有各自的权重,得到的图是有权图。比如地铁路线图,连接两站的边的权重可以是距离,也可以是价格,或者其他。反之,如果图的边没有权重,或者权重都一样(即没有区分),称为无权图。
-
连通图
如果图中任意两点都是连通的,那么图被称作连通图。图的连通性是图的基本性质。无向图中的一个极大连通子图称为其的一个连通分量。
-
图的存储
常用的存储方式有两种**:邻接矩阵和邻接表。**
(3)知识图解
(4)图的遍历
遍历结果通常不唯一
- 深度优先:一条路走到黑,这条路不通了可以折返找没走过的路
- 广度优先:一行一行的遍历、或者一列一列的遍历,地毯式搜索

2、邻阶矩阵
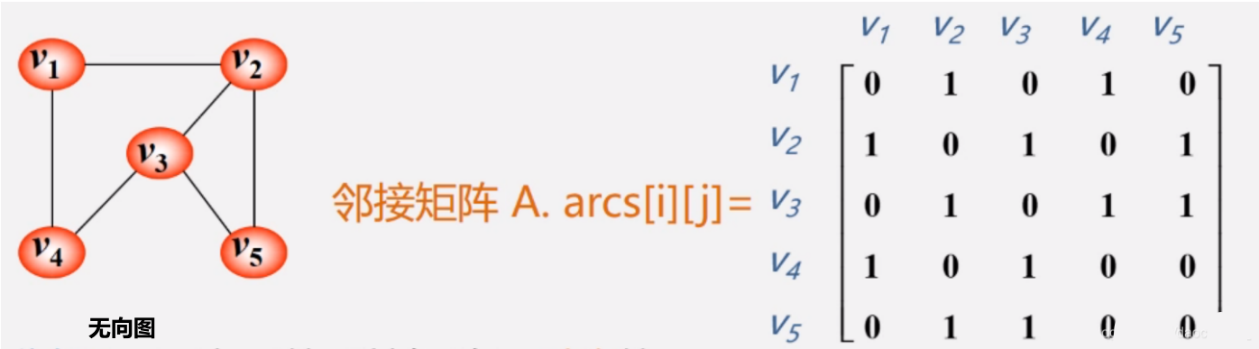
- 无向图
- 特点:
1.无向图的邻接矩阵是对称的,且主对角线元素全为0(因为自己到自己没有边)。
2.顶点i的度=第i行(列)中1的个数。
3.完全图的邻接矩阵中,主对角元素为0,其余全为1,如果带权重的话没有连接写无穷。按0101这样写就行
- 特点:
-
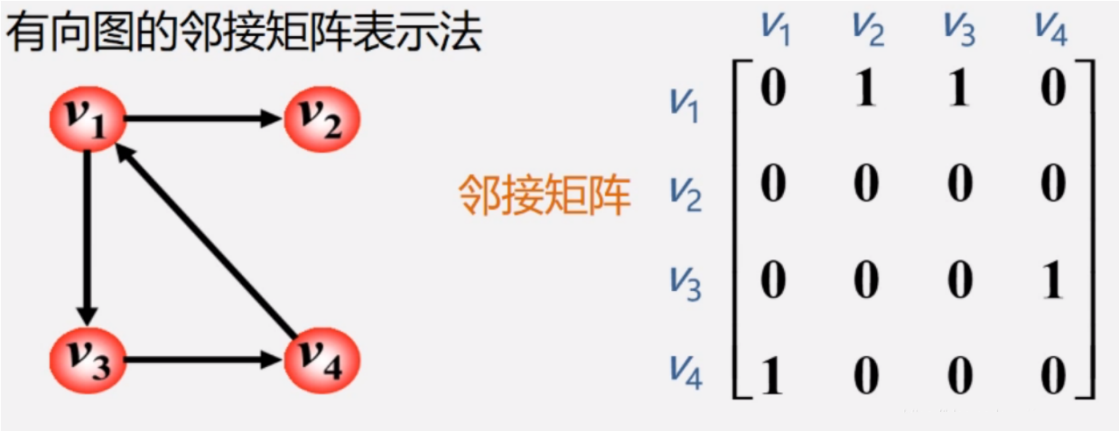
有向图
特点:
有向图的邻接矩阵可能不是对称的。
顶点的出度=第i行元素之和;
顶点的入度=第i列元素之和;
顶点的度=第i行元素之和+第i列元素之和。
3、邻接表
-
无向图
- 邻接表不唯一
- 有连接的都要指向
-
有向图
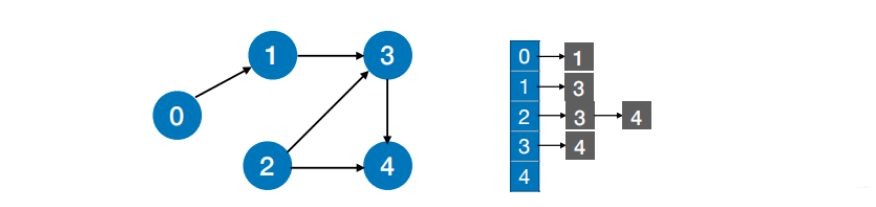
4、拓扑排序
-
入度:有箭头指向自己的为入度点
-
出度:有指向别人的箭头
- 如4:入度为2,出度为2
- 如1:入度为0,出度为2
-
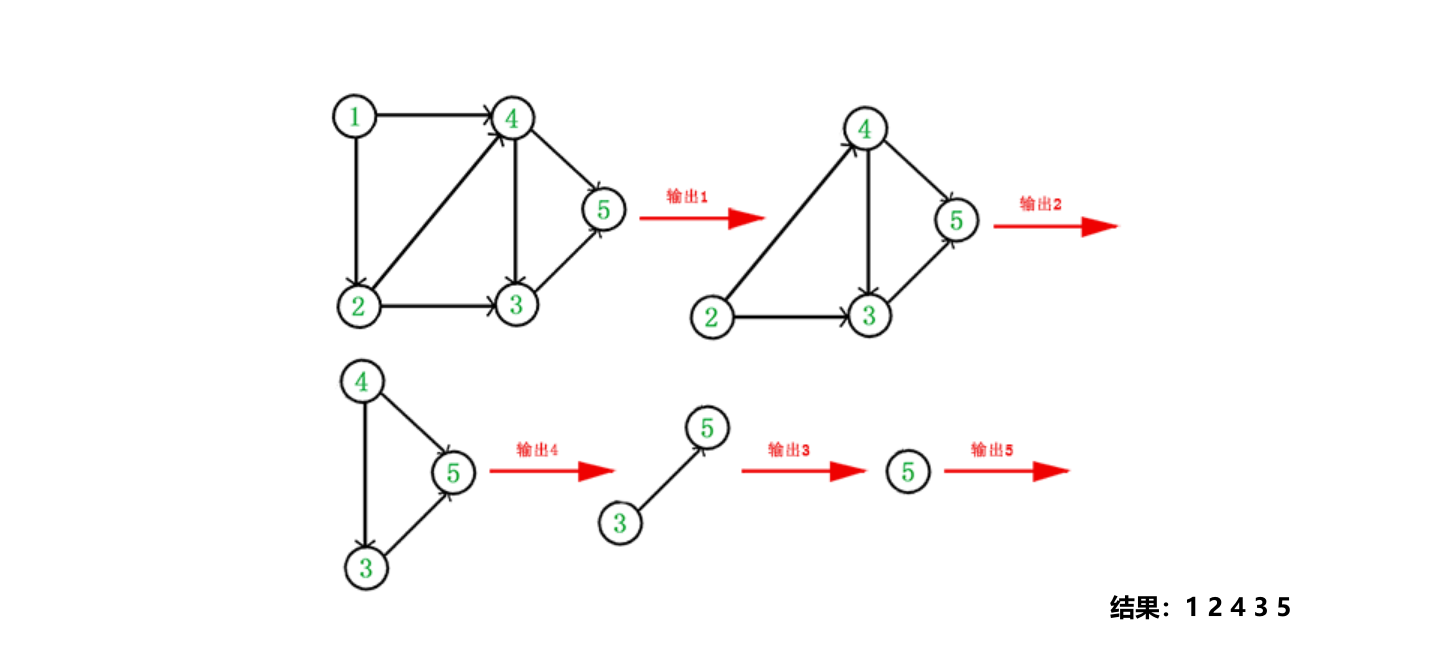
拓扑排序:
找没有入度的点输出,并去除所对应边,如图,因为1没有入度输出1,第二个图2没有入度输出2。如果有多个没有入度的随意选择
-
逆拓扑排序
- 与拓扑排序相反,逆拓扑排序找没有出度的点
- 如上图逆拓扑排序输出结果为:5、3、4、2、1
5、AOE网、关键路径
-
AOE网
AOE网(Activity On Edge Network)用边表示活动,用顶点表示事件(活动的完成)。边是带权的,表示活动需要的时间。
-
源点与汇点
源点:
入度为0的点,表示一个工程的开始。汇点:
出度为0的点,表示一个工程的结束。 -
关键活动与关键路径
在AOE网中,从源点到汇点最长的路径称为关键路径,在关键路径上的活动称为关键活动。
因为AOE网中的活动是可以并行进行的,所以整个工程的时间开销,其实是最长路径的时间开销。即关键路径制约整个工程的工期。
-
关键路径应用
-
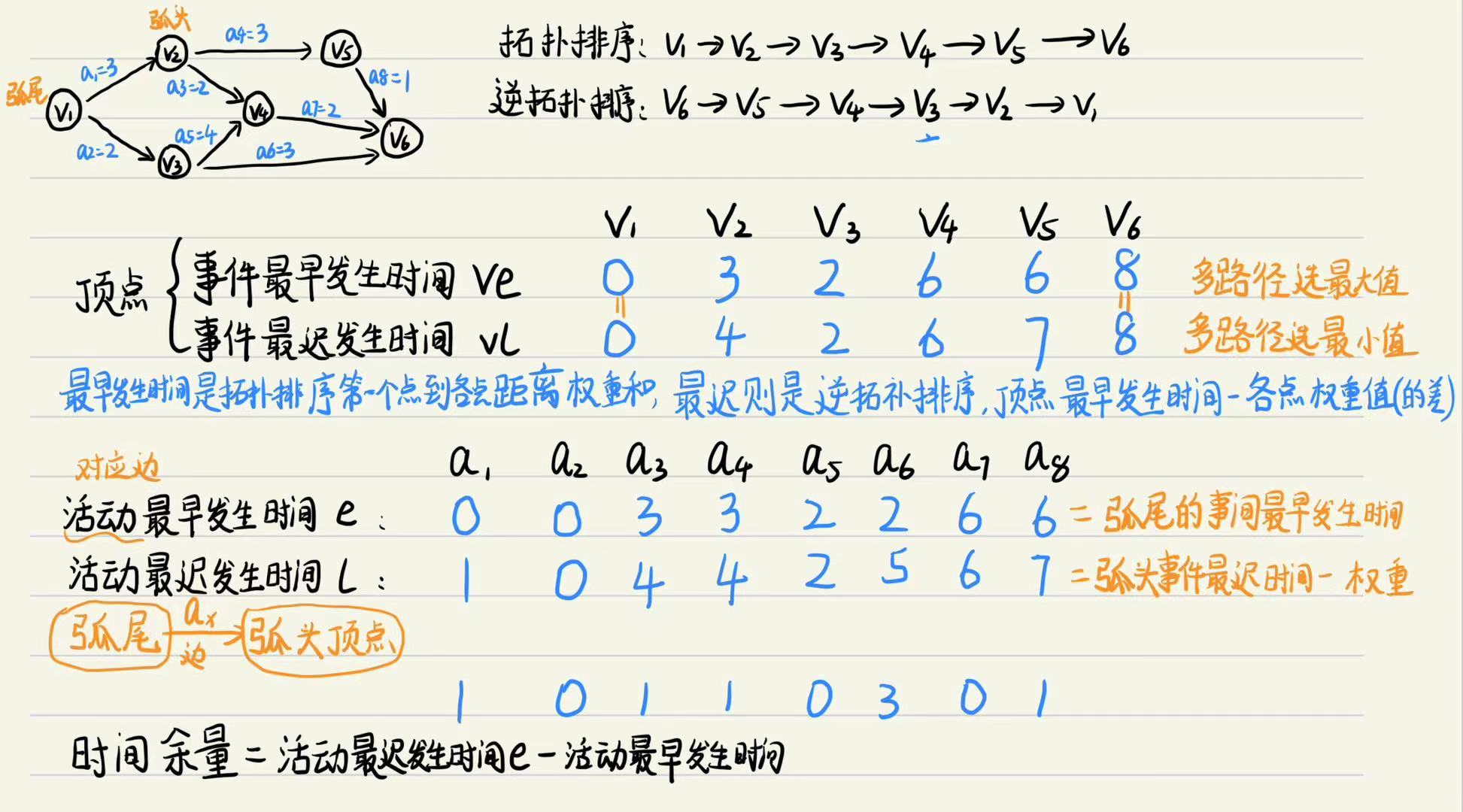
计算
事件最早发生时间 = 拓扑排序第一个点到各点权重和(多路径选最大值)
时间最迟发生时间 = 逆拓扑排序的第一个点 - 到各点权重值(多路径选做差完最小的值)
活动最早发生时间 = 弧尾的事件最早发生时间
活动最迟发生时间 = 弧头事件最迟发生时间 - 权重(即该边权重)
时间余量 = 活动最迟发生时间 - 活动最早发生时间
-
















 495
495











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









