







项目缘由与总结
手机上的Timberman游戏被朋友挑战,无奈只能达到300多分,突发奇想做一个自动化的系统来替代人进行操作,反超朋友记录
Timberman游戏规则简单,应该很轻松就能做出一套系统来实现自动化操作,况且机器毕竟是机器,依赖于算法做出的判断基本不会出错。
但是实践下来,遇到了不少问题,最终这套系统没有按照理想的情况运行下去,原因如下
1. 树莓派处理速度不够理想,无法瞬间得出运算结果
2. 手里只有盛辉MG995型舵机,实在是大材小用,树莓派也不能很好的进行驱动,也没有单独为他购置一套设备
3. 常规电容笔的工作是依赖于传递人手的电容进行工作的
4. 准备着手准备毕业设计,这个小东西只能暂时搁置了
等将来入手性能更加强大的树莓派2之后,再重启这个小项目吧,下面简单记录一下这个小东西
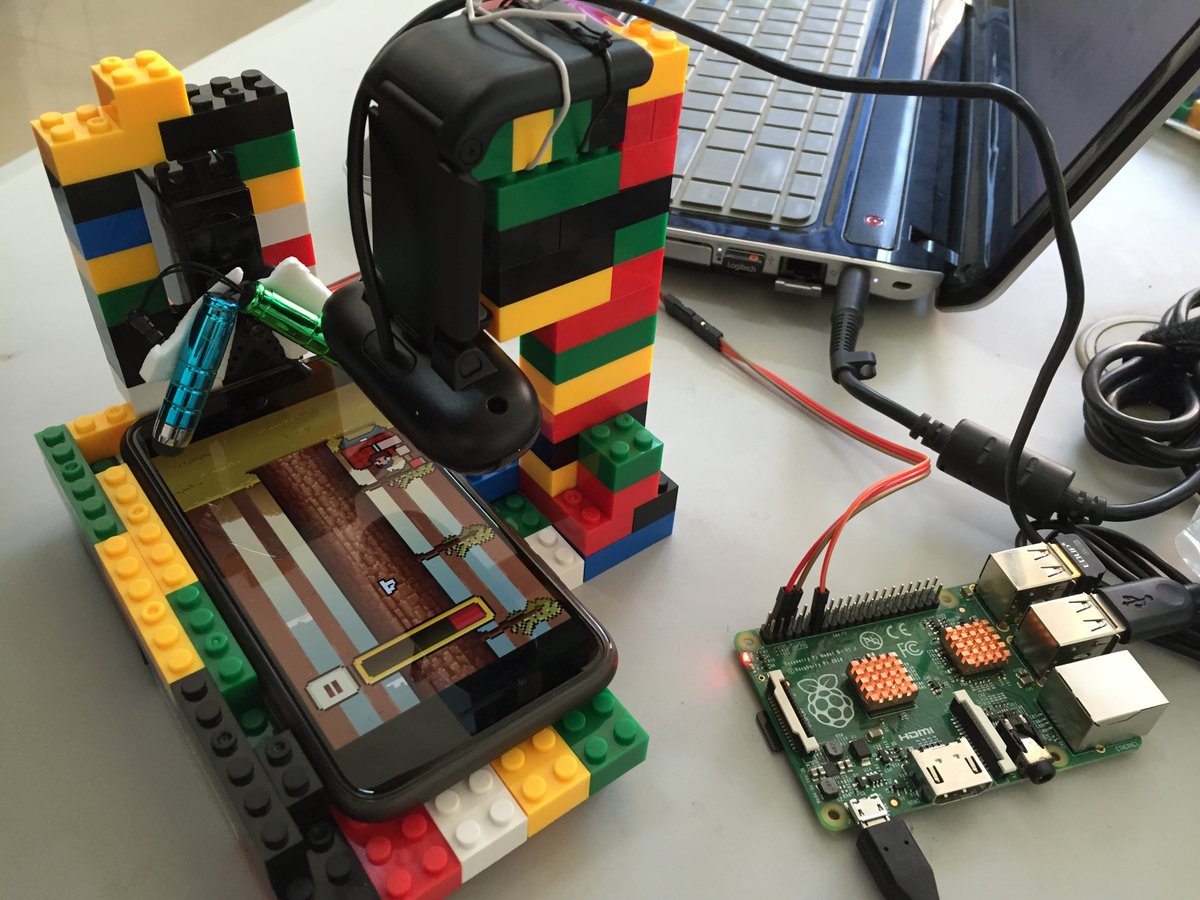
设备图片
实现思路
- 获取图像
- 切割
- 灰度化
- 与标准图进行对比
- 判断相似度
- 做出响应
工具
- 树莓派及摄像头
- 一个稳定的支撑平台
- Python Imaging Library 库(简称pil库)
源代码
源代码十分简单,都是直接调用pil库的函数直接运行,舵机因为硬件问题调试的不是很完美,等着以后有了新装备再来完善
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 7614
7614

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









