







TwinCAT3 Scope Y-T NC Project的使用方法
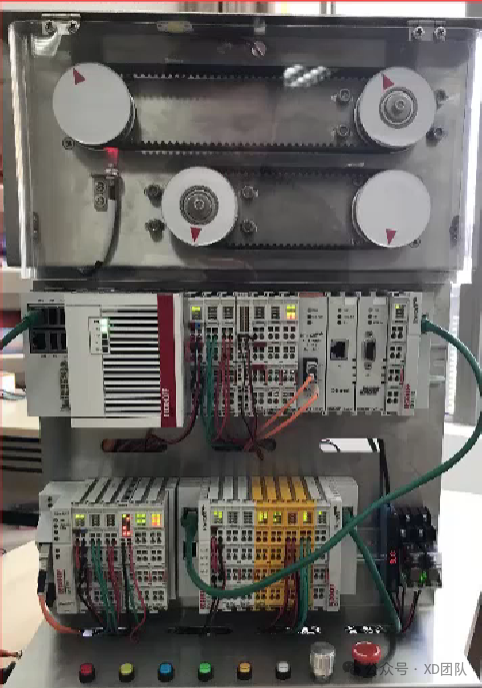
图中有两个电机

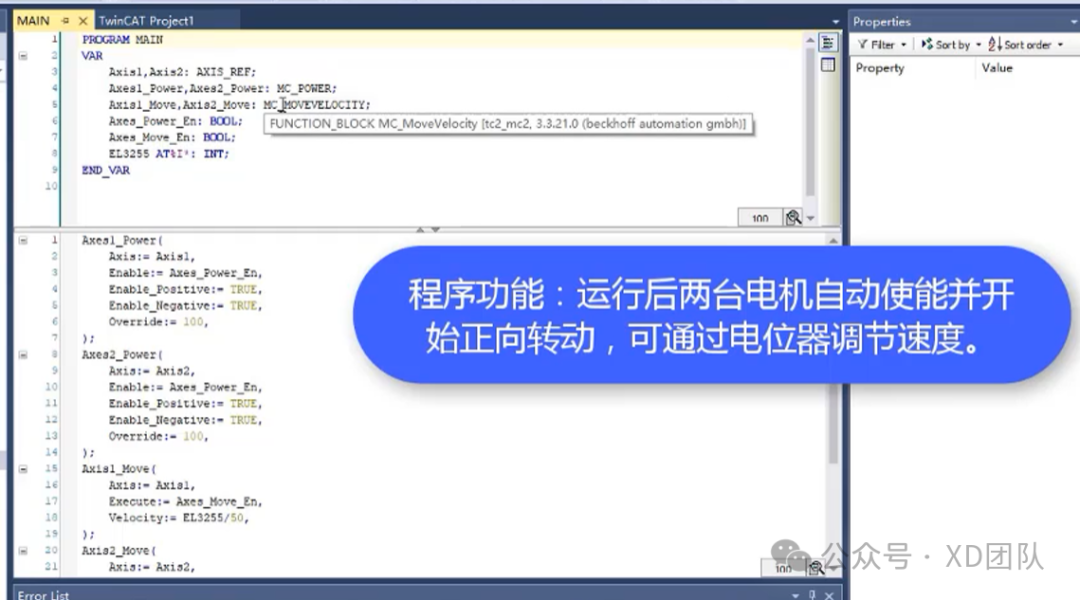
在程序中添加两个电机轴
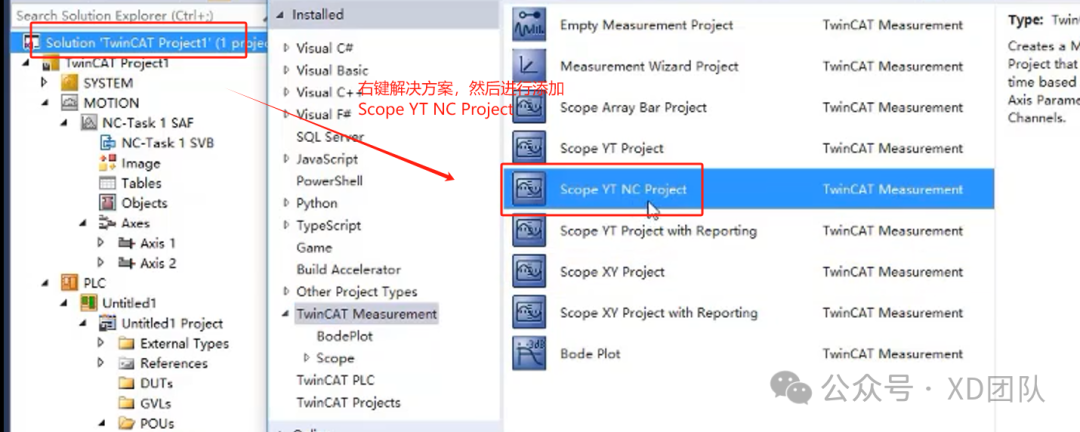
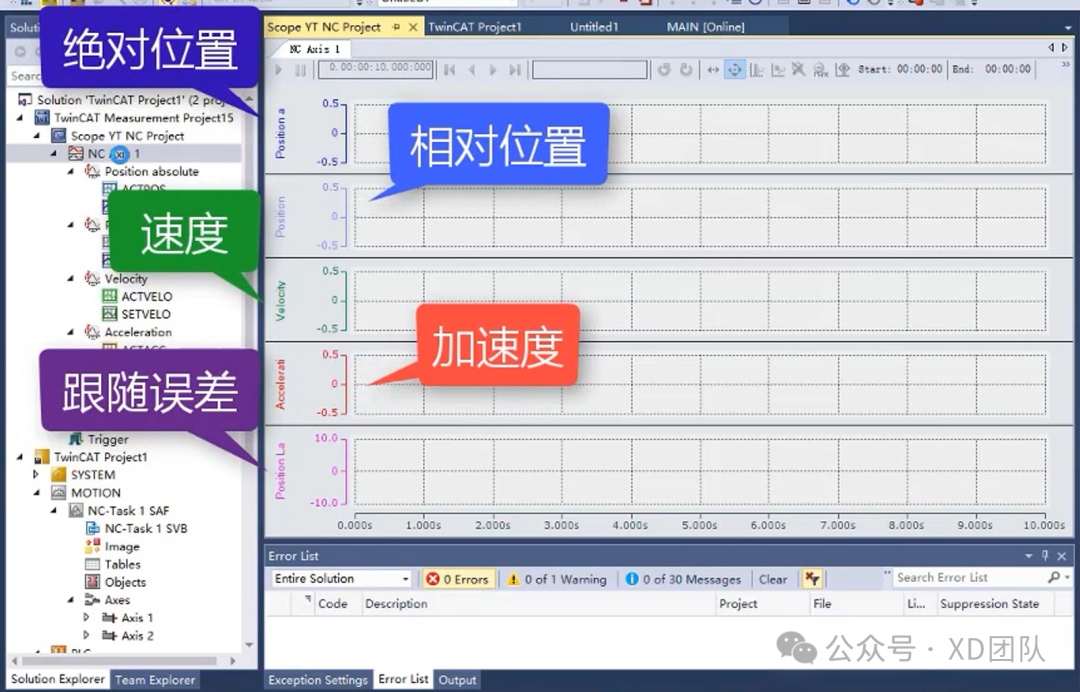
右键点击解决方案,然后添加Scope YT Project
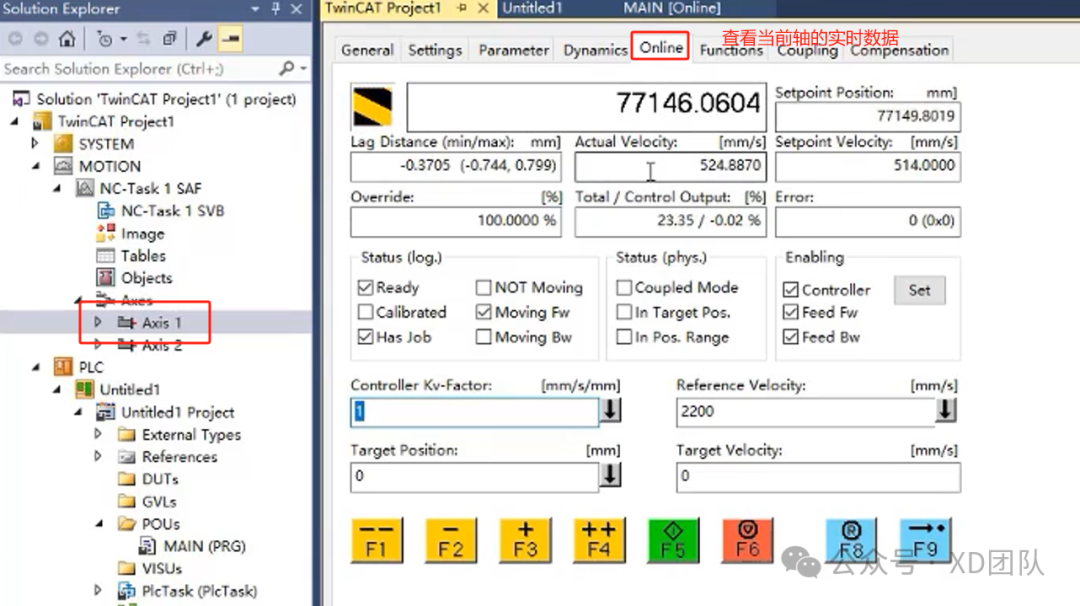
记录绝对位置,速度,相对位置,加速度,跟随误差
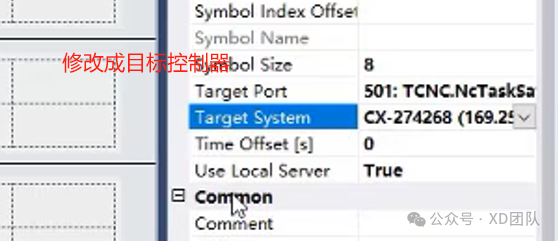
如果不是本地的虚拟轴,则可以通过Target System进行修改目标控制器
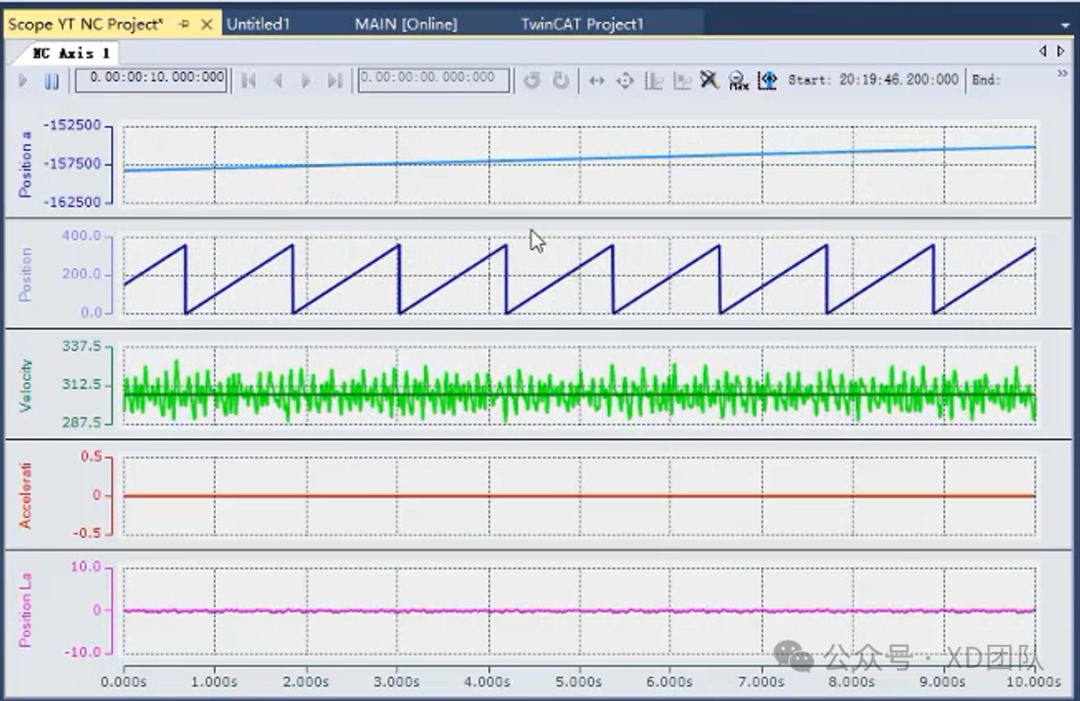
开始监控
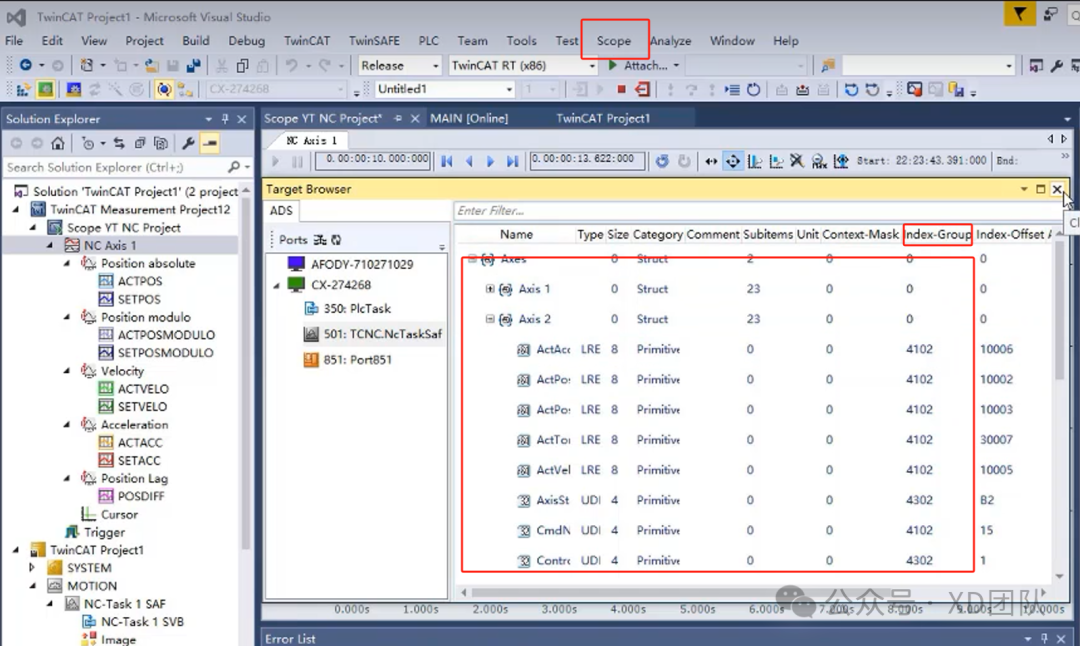
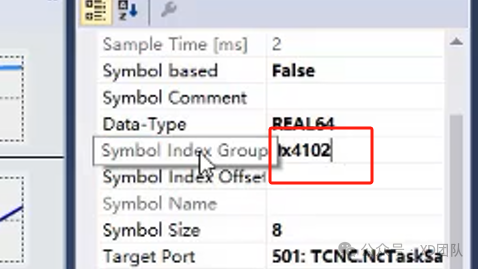
更具Index Group的值,修改Symbol Index Group就可以进行监控了
TwinCAT3 Scope Y-T NC Project的使用方法
图中有两个电机
在程序中添加两个电机轴
右键点击解决方案,然后添加Scope YT Project
记录绝对位置,速度,相对位置,加速度,跟随误差
如果不是本地的虚拟轴,则可以通过Target System进行修改目标控制器
开始监控
更具Index Group的值,修改Symbol Index Group就可以进行监控了
 901
4078
901
4078

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




























