







1、泰勒展开式
泰勒展开式是用多项式来近似表示函数在某点周围的情况。
对于一个函数在x=a处的展开式,这个展开式在x=a附近对函数的逼近是最精确的,离a越远,这个公式就越不精确。实际函数值和多项式的偏差称为泰勒公式的余项。

2、方向导数和偏导数
方向导数(directional derivative)的通俗解释是:我们不仅要知道函数在坐标轴方向上的变化率(即偏导数),而且还要设法求得函数在其他特定方向上的变化率。而方向导数就是函数在其他特定方向上的变化率。
对于二维函数,任意方向的导数可以如下定义:
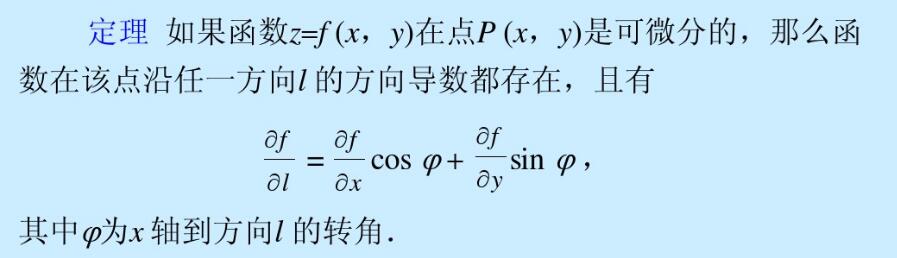
对于高维函数,我们可以同理推得,我们可以通过求得目标方向与各个方向之间的夹角,然后通过各维上的偏导数组合得到方向导数。
3、函数梯度:
对于一个多维函数,梯度是它的各界偏导数的值组成的向量。
函数




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









