






Anchor-Free综述
一. CornerNet
1.1 概述
这是第一篇将anchor-free的mAP值刷入COCO榜单的论文,主要贡献是将keypoints的估计方式引入目标检测之中。
主要创新点:
- 使用
Heatmap表示目标的坐标left-top、right-bottom - 增加
Offset使得定位更加精确 - 使用
Embeddings使得两个关键点匹配 - 使用
left、right、top、bottom pooling层增加目标边缘的定位准确度

1.2 模块介绍
1.2.1 Heatmap
使用两个Heatmaps表示一个目标的左上角和右下角点,例如:\(Left\_top=B \times C \times W \times H\) ,其中 \(C\) 表示目标类别,同理右下角点完全相同。对于每一个像素,这是一个分类问题,使用focal-loss去除类别不均衡问题。对于focal-loss而言,类别非0即1,然后Heatmap是使用Gaussian-map生成的,周围的点都是 \(value \in [0-1]\)。下图展示了,label周围的点实际也是较好的定位点,不应该直接归结为背景,而且给予一定的权重,基于此得重新设计loss函数
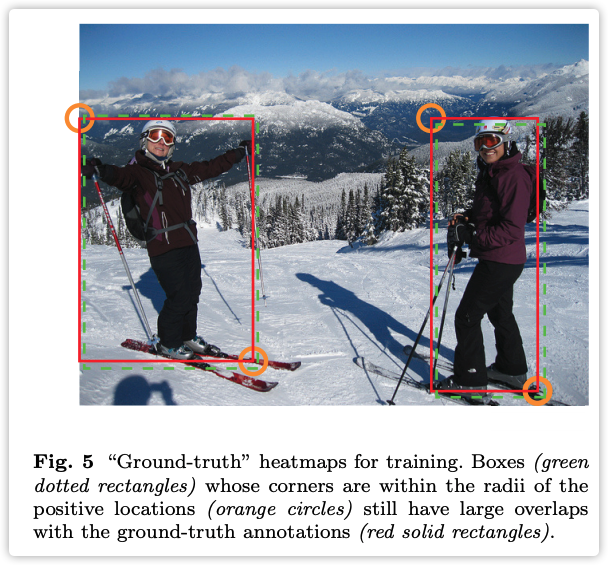
其中 \(y_{cij}=1\) 的时候和focal-loss相同,\(y_{cij}<1\) 的时候使用 \(1-y_{cij}\) 作为减少惩罚,如下公式(1)所示
1.2.2 Offset
当前的网络都会进行Downsample or Upsample的操作,使用heatmap最明显的两个缺点:1)计算量比较大,2)精度不准确。对于前者,这里不讨论,可以参考人体关键点期望分布进行解决。后者是这里解决的方案,直接学习一个offset参数去解决
这里比较简单,不再赘述直接使用SmoothL1-Loss计算即可
1.2.3 Grouping Corners
此处方法参考论文:Associative Embedding
已经学习到多组两个角点的位置,如何将其对应?和Offset处理方式类似,直接使用一个参数(一组参数)去编码当前关键点的组ID信息
比如:Left-top点的heatmap维度为 \(B\times C \times W \times H\),Embedding的维度为 \(B\times W \times H \times N\) ,其中\(C\)为种类信息,\(N\)为维度信息,这样就为每个目标设定了一个长度为\(N\)的vector信息。当然可以使用\(N\times M \times K...\) 等多维度信息去表示。
#https://github.com/zzzxxxttt/pytorch_simple_CornerNet/blob/767bf0af3229d9ffc1679aebdbf5eb05671bbc75/utils/losses.py#L34
def _ae_loss(embd0s, embd1s, mask):
num = mask.sum(dim=1, keepdim=True).float() # [B, 1]
pull, push = 0, 0
for embd0, embd1 in zip(embd0s, embd1s):
embd0 = embd0.squeeze() # [B, num_obj]
embd1 = embd1.squeeze() # [B, num_obj]
embd_mean = (embd0 + embd1) / 2
embd0 = torch.pow(embd0 - embd_mean, 2) / (num + 1e-4)
embd0 = embd0[mask].sum()
embd1 = torch.pow(embd1 - embd_mean, 2) / (num + 1e-4)
embd1 = embd1[mask].sum()
pull += embd0 + embd1
push_mask = (mask[:, None, :] + mask[:, :, None]) == 2 # [B, num_obj, num_obj]
dist = F.relu(1 - (embd_mean[:, None, :] - embd_mean[:, :, None]).abs(), inplace=True)
dist = dist - 1 / (num[:, :, None] + 1e-4) # substract diagonal elements
dist = dist / ((num - 1) * num + 1e-4)[:, :, None] # total num element is n*n-n
push += dist[push_mask].sum()
return pull / len(embd0s), push / len(embd0s)1.2.4 Corner Pooling
由于两个角点光靠局部位置很难确定,对比mask和bbox的区别。这里使用创新的pooling层去解决这个问题。其实按照现在流行的做法,使用Non-local、SE模块去处理可能会更好。做法非常简单,但需要自己写cuda层实现。

1.3 总结
此论文是开创性的,位置毋庸置疑。
缺点也是一目了然-->>
二. CenterNet
2.1 概述
基于CornerNet的改进版本,主要贡献是速度快精度准,当时是用在移动端利器
主要创新点:
- 使用中心点代替角点,直接回归长宽
- 使用Offset(
CornerNet已经存在) - 使得增加属性非常容易,比如
depth、direction......
2.2 Center-Regression
对于CornerNet来说,回归两个角点+回归Offset+回归分组信息+NMS,显得特别繁琐,而且计算很慢!这里对其进行如下改进:
- 使用中心点和 \(W、H\) 代替两个角点
- 依然回归
Offset对位置精度弥补 - 去除分组对齐
- 去除NMS
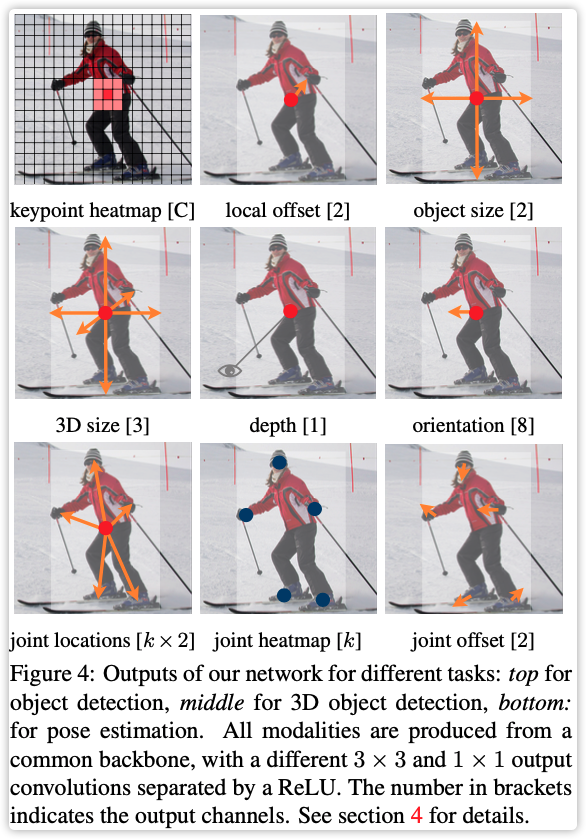
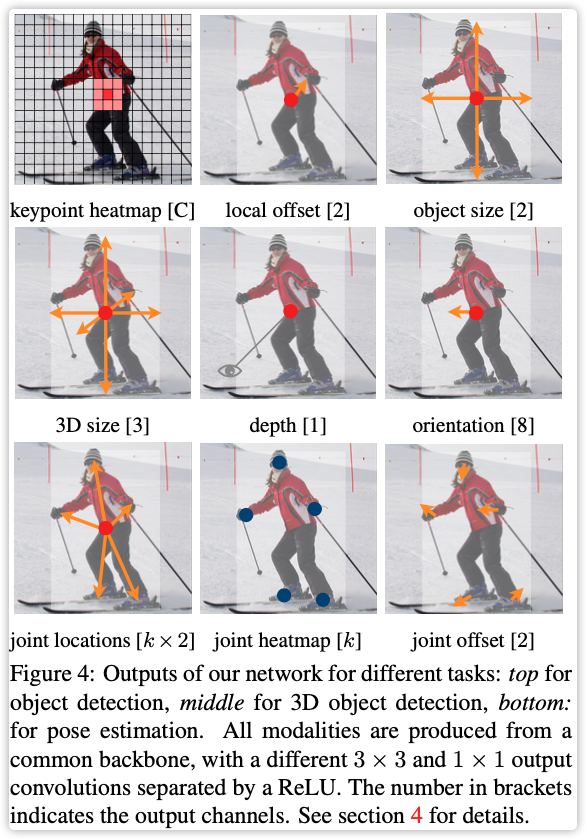
由于其核心是使用目标的中心点进行的操作,所以添加其它属性非常方便,如上图中的方向、关键点、深度......
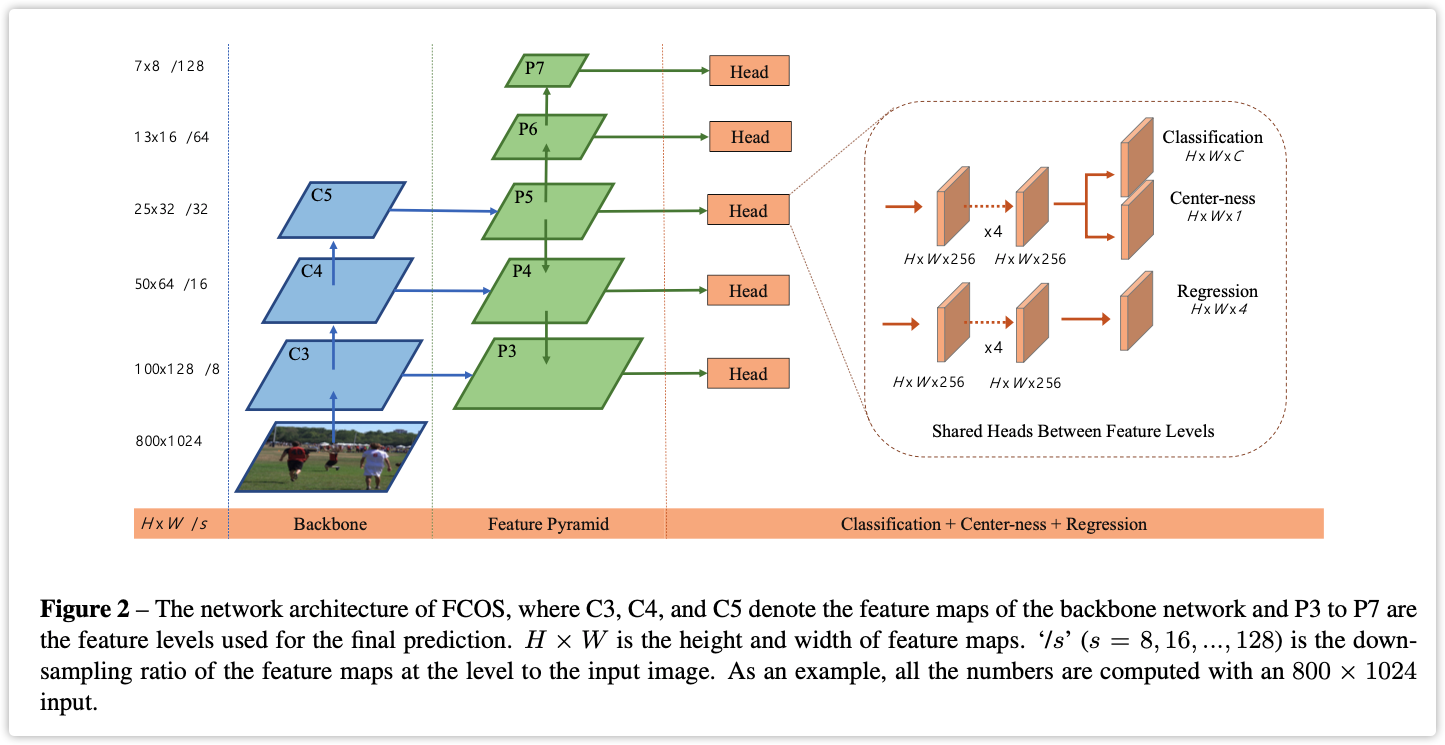
三. FCOS
3.1. 概述
主要做的贡献如下(可能之前有人已提出):
- FPN分阶段回归
- Center-ness Loss
3.2. 模块介绍
3.2.1 论文思路简介
论文整体比较简单,直接从头读到尾没有什么障碍,好像Anchor-free的文章都比较简单。下面直接以模块介绍。
文章中 \(l^*、b^*、r^*、t^*\) 表示label,\(l、b、r、t\) 表示predict
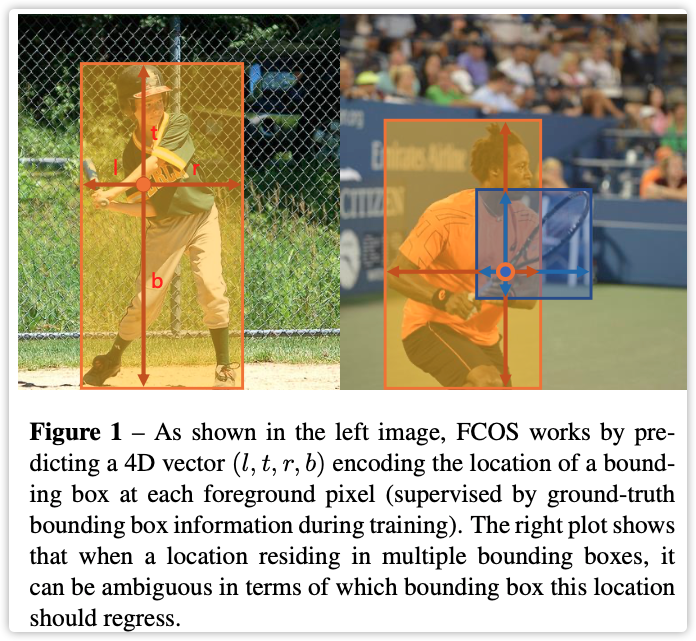
3.3.2 回归形式
文章直接回归 \(l、r、b、t、c\) 其中 \(c\) 表示种类,前面四个在上图中有表示。
回归采用正负样本形式:
- \(feature map\) 表示回归的特征图(以 \(M\) 表示)
- \(M_{i,j}\) 表示 \((i,j)\) 个点的特征值
- 将 \(M_{i,j}\) 映射到原图,假设当前特征图的总步长是 \(S\) (和原图比例),则原图点\(P_{i,j} =(\frac{S}{2}+M{i}*S,\frac{S}{2}+M{j}*S)\)
- \(P_{i,j}\) 落入哪个label区域,就负责回归哪个label,算作正样本。落到外部则算作负样本。
- 如果落在重复区域,按照上图的形式(哪个面积小,就负责哪个label)
文章采用FPN结构,用于提高召回率和精确度。参考Anchor-based(不同尺度的Anchor负责不同大小的目标),文章对不同的层进行限制目标大小:其中\(M_{1}、M_{2}、...M_{6} = 0、64、128、256、 512\),按照 \(M_{i}<(l^*、b^*、r^*、t^*)<M_{i-1}\) 形式进行分配。
最后文章发现一个问题,NMS时候出现很多和最终目标接近的框,我们希望的是:负样本和正样本区分明显,而不是很多接近正样本的框(比如分类,虽然可以正确分类,但是出现很多 \(conf=0.45\) 的目标,我们希望出现\(conf_{pos}=0.99,conf_{neg}=0.11\))。
文章通过设置 \(center\) 进行控制,对于那些中心偏离的目标进行抑制。我们不仅仅要IOU好,也要center好。文章通过新建一个新的分支进行center-ness进行回归。
3.3 参考文献
- 原始论文
- FCOS改进
四 ATSS
此论文对比anchor-free和anchor-base的区别,从而在anchor-base上提出一套自动计算anchor的工具。使用较少,这里略过。
五.GFLV1
5.1. 论文简介
将目标检测Loss和评价指标统一,提升检测精度。这是一篇挺好的论文,下面会将其拓展到其它领域。
主要做的贡献如下(可能之前有人已提出):
- 分类Loss+评价指标
- Regression分布推广到一般性
5.2. 模块详解
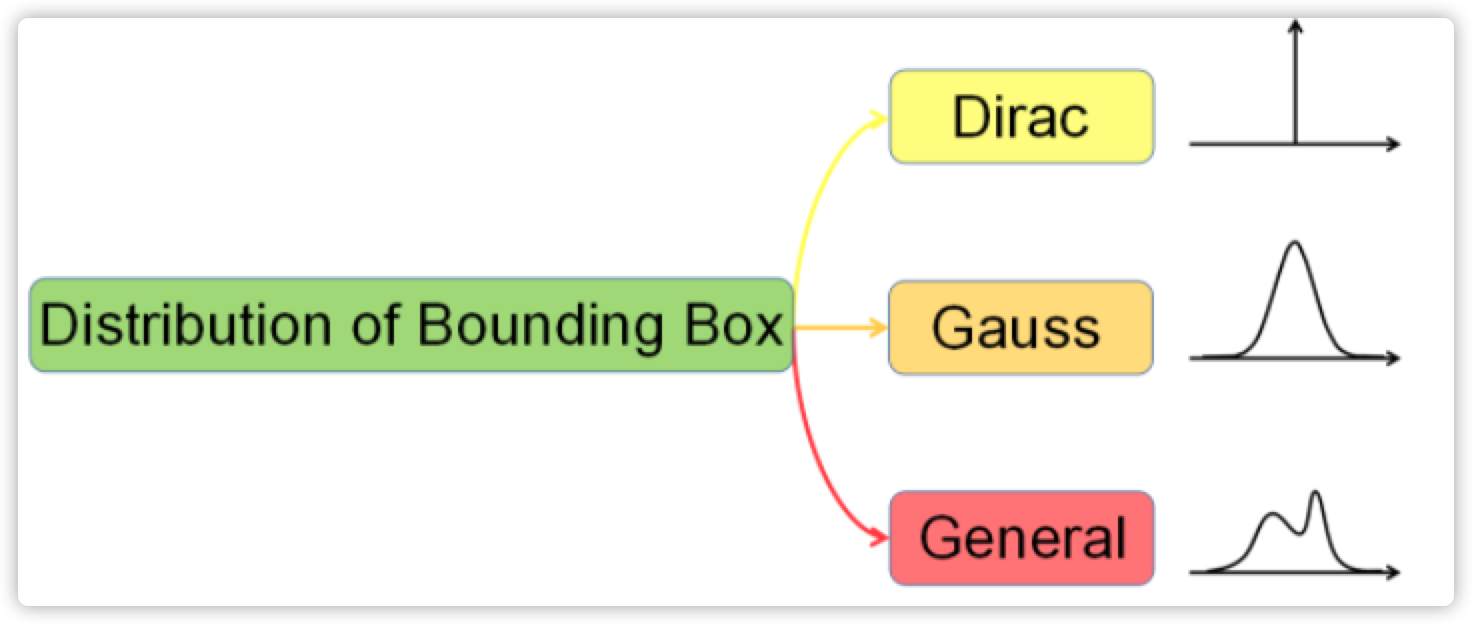
5.2.1 谈谈分布
- 什么是分布?表示一个数发生的概率,设 \(f=P(x)\) 表示分布函数,\(f\) 表示发生的概率,\(x\) 可能存在的数。1)显而易见,\(\int_{-\infty}^{+\infty}P(x)dx=1\),所有的数存在概率总和为1。 2)\(y=\int_{-\infty}^{+\infty}P(x)*xdx\) ,它的整体期望(平均值)肯定是等于目标值的。
- 什么是 \(Dirac\) 分布? reference ,\(f=\delta(x-\mu)\) , 当 \(x=\mu\) 概率为1,其它都是0。这是什么意思?此分布简称为绝对分布,只要是直接求目标的,都属于此分布。比如:1)直接计算 \(one-hot\) 交叉熵 \(label=[0,0,0,1],pred=[0.2,0.1,0.1,0.6]\),我们的目的就是两者相等,其它的值都是不存在的。你问我按照\(Delta\) 分布应该其他值为0才对啊,那loss=0(实际loss为什么不是0)怎么回传呢?记住Loss和分布不是一个概念,Loss是我们用一种方式使得结果达到理想分布,分布是一种理想的状态,简单点说 \(Loss \to Sample\)。2)那么直接进行BBox回归也是一种 \(Delta\) 分布,因为都是预测一个值,然后直接和Label进行smoothL1计算Loss。
- 什么是 \(Gaussian\) 分布,这个不多说大家都知道。\(Gaussian-YOLO\) 和 \(Heatmap\) 都是属于此分布。举个例子:刚开始做关键点(当前小模型人脸也是这样做的)直接使用坐标 \((x,y)\) 进行回归,显然这是属于 \(Delta\) 分布的,后面人们将其改进为 \(Heatmap\),这就是将分布改为 \(Gaussian\),所以称为\(Gaussian-Heatmap\) .
- 什么是任意分布?只满足分布的两个条件,没有具体的公式。直接使用期望和Label进行计算Loss即可。
- 进一步理解Loss和分布的关系,期望和Label计算Loss(前向推导使用期望做结果),中间概率和期望计算Loss(使得输出按照一定分布进行,容易收敛提高精度)。
5.2.2 分类Loss
- 具体由来见:论文作者知乎回答
笔者给出简短说明:
- 先去看一下FCOS论文,其中使用 \(center-ness\) 计算预测框质量,两个作用:1)训练时抑制质量较差的框。2)前向计算时用于NMS操作指标。
- 问题来了。。。训练阶段、前向计算、评价指标没有统一?
- 论文魔改一下Focal-Loss、center-ness统一为一个Loss

-
此部分比较简单,基本和FCOS类似
# 代码出自mmdetection
@weighted_loss
def quality_focal_loss(pred, target, beta=2.0):
"""Quality Focal Loss (QFL) is from
Generalized Focal Loss: Learning Qualified and Distributed Bounding Boxes
for Dense Object Detection
https://arxiv.org/abs/2006.04388
Args:
pred (torch.Tensor): Predicted joint representation of classification
and quality (IoU) estimation with shape (N, C), C is the number of
classes.
target (tuple([torch.Tensor])): Target category label with shape (N,)
and target quality label with shape (N,).
beta (float): The beta parameter for calculating the modulating factor.
Defaults to 2.0.
Return:
torch.Tensor: Loss tensor with shape (N,).
"""
assert len(target) == 2, """target for QFL must be a tuple of two elements,
including category label and quality label, respectively"""
# label denotes the category id, score denotes the quality score
label, score = target
# negatives are supervised by 0 quality score
pred_sigmoid = pred.sigmoid()
scale_factor = pred_sigmoid
zerolabel = scale_factor.new_zeros(pred.shape)
loss = F.binary_cross_entropy_with_logits(
pred, zerolabel, reduction='none') * scale_factor.pow(beta)
# FG cat_id: [0, num_classes -1], BG cat_id: num_classes
bg_class_ind = pred.size(1)
pos = ((label >= 0) & (label < bg_class_ind)).nonzero().squeeze(1)
pos_label = label[pos].long()
# positives are supervised by bbox quality (IoU) score
scale_factor = score[pos] - pred_sigmoid[pos, pos_label]
loss[pos, pos_label] = F.binary_cross_entropy_with_logits(
pred[pos, pos_label], score[pos],
reduction='none') * scale_factor.abs().pow(beta)
loss = loss.sum(dim=1, keepdim=False)
return loss5.2.3 回归Loss
主要包括两个部分:
-
\(Delta\) 分布推广到任意分布
- 论文公式(3)是 \(Delta\) 分布的期望,公式(4)和(5)是任意分布的期望
- 直接预测多个(论文设置为16)值,求期望得到最佳值
- TIPS: 效果肯定比 \(Delta\) 分布好,但是计算量会增加。小模型一般不适用,大模型使用较多。
-
限制任意分布
- 任意分布会过于离散,实际真实的值距离label都不会太远
- 限制分布范围,论文公式(6)
- TIPS: 按照公式推导应该效果好(正在推广到关键点检测),使用任意分布的都可以加上试试。
# 代码出自mmdetection
@weighted_loss
def distribution_focal_loss(pred, label):
"""Distribution Focal Loss (DFL) is from
Generalized Focal Loss: Learning Qualified and Distributed Bounding Boxes
for Dense Object Detection
https://arxiv.org/abs/2006.04388
Args:
pred (torch.Tensor): Predicted general distribution of bounding boxes
(before softmax) with shape (N, n+1), n is the max value of the
integral set `{0, ..., n}` in paper.
label (torch.Tensor): Target distance label for bounding boxes with
shape (N,).
Return:
torch.Tensor: Loss tensor with shape (N,).
"""
# 完全按照论文公式(6)所示,label是真实值(目标框和anchor之间的偏差,参考FCOS)
# pred的shape(偏差*分布),如果没有后面的分布,那就变成delta分布
dis_left = label.long() # label范围[0,正无穷],感觉这里应该-1然后限制一下范围最好。作者说long()向下取整,但是这解决不了对称问题。
dis_right = dis_left + 1
weight_left = dis_right.float() - label
weight_right = label - dis_left.float()
loss = F.cross_entropy(pred, dis_left, reduction='none') * weight_left \
+ F.cross_entropy(pred, dis_right, reduction='none') * weight_right
return loss5.3. 参考文献
六. GFLV2
6.1 概述
这篇论文非常非常的简单,类似加入了一个全局信息的SENet模块、或者说Non-Local模块,读懂GFLV1之后,马上解决V2的问题。
此方法在小模型上不适合,在大模型上涨点明显。可以进一步推广,此方案用在大模型non-share Head中,而小模型都是共享Head的。















 1816
1816











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









