






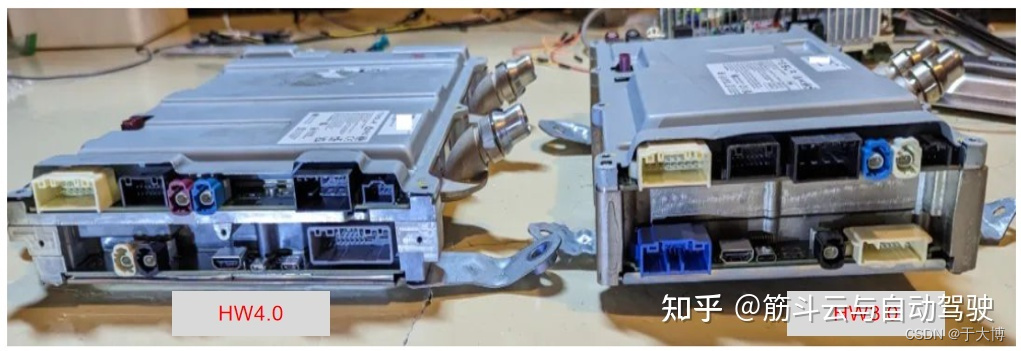
1. 外观造型上的差异
相比于HW3.0
1)HW4.0 的面积更大一些,但厚度更薄一些
2)HW3.0 采用3个固定点,HW4.0采用4个固定点
2. 智驾域控模块硬件上的差异
2.1 外设接口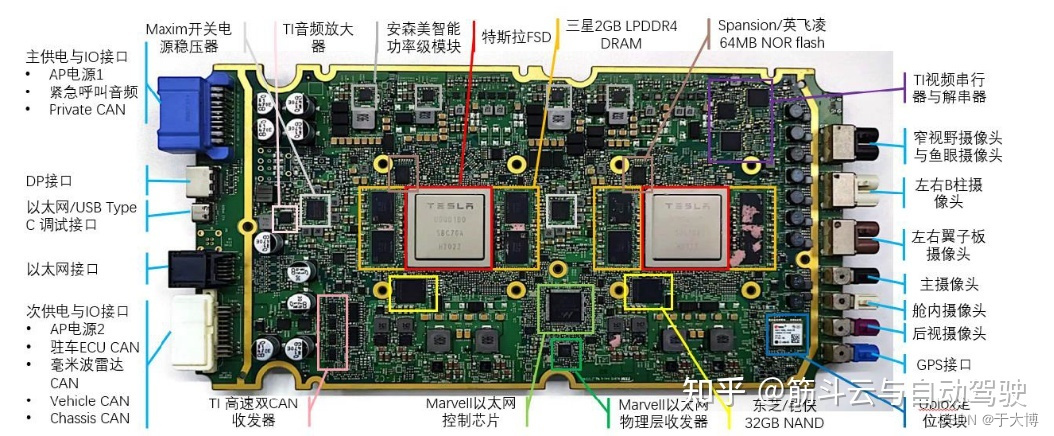
(HW3.0 - 智驾模块PCB板 图片来源- 中信证券报告)
(HW4.0 - 智驾模块PCB板 资料来源- 博主Greentheonly披露的相关信息)
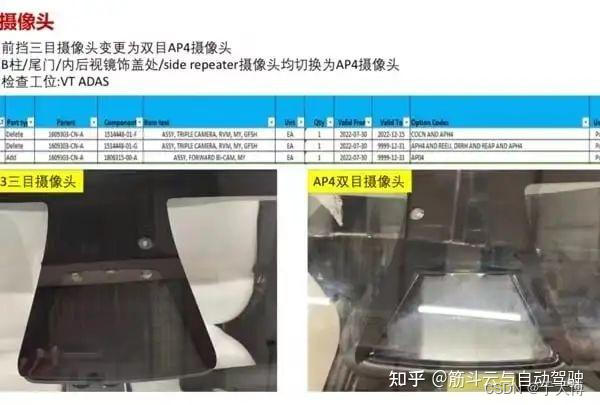
1)摄像头接口的变化
HW3.0 的智驾域控模块PCB板子上有9个摄像头接口:
- 前风挡 - 前视三目摄像头(3)
- 车内后视镜上方 - 舱内监控摄像头(1)
- 前翼子板 - 左右各1个侧后视摄像头(2)
- B柱 - 左右各1个侧前视摄像头(2)
- 后尾门牌照上方- 1个后视摄像头(1)
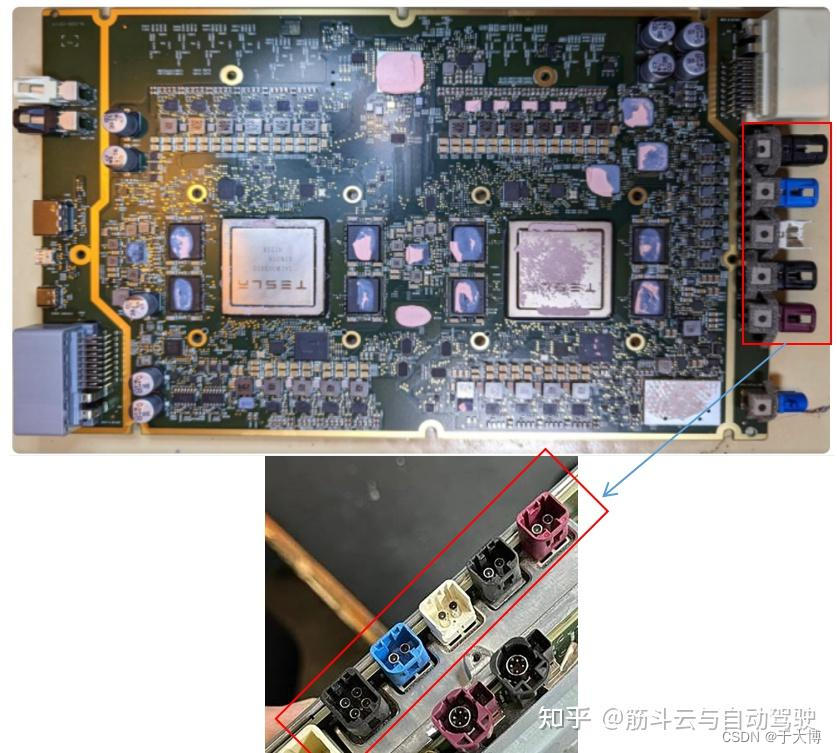
HW4.0 的智能驾驶模块PCB板子上有12个摄像头接口:
HW4.0 相比 HW3.0 :预留1个摄像头接口,舱内监控需要1个摄像头接口,前风挡位置的前视摄像头接口的需求由3个变为2个。那么除此之外,车外其它位置还需要布置8颗摄像头。
HW3.0与HW4.0 前置摄像头布置
这11颗摄像头具体怎么布置,目前尚未有明确的答案。据业内相关人士猜测:
- 前风挡 - 前视双目摄像头(2)
- 车内后视镜上方 - 1个舱内摄像头(1)
- 前翼子板 - 左右各1个侧后视摄像头(2)
- 前保险杠 - 左右各1个侧前视+ 1前视(3)
- 后保险杠 - 左右各1个侧后视+ 1后视(3)

HW4.0系统11个摄像头布置示意图
备注:据相关资料显示,HW4.0 :前风挡上的前置摄像头的分辨率将由120万像素提升至500万像素。HW3.0:前置摄像头配备的图像传感器为安森美的AR0136AT,HW4.0:前置摄像头配置的图像传感器为索尼的IMX490。对于HW4.0 系统,如果其它摄像头也采用500万像素的配置,那么对算力的需求会比较大,同时成本也会比较高。那么,其它摄像头会不会也采用500万像素的配置,目前尚未可知。
2)GPS模块接口变化
HW4.0 :3频GPS模块接口,新增L5频率,有利于GPS测量过程中的周跳探测、电离层延迟误差改正和整周模糊度的确定,将民用定位精度从5米提升至30厘米。
备注:HW3.0中的GPS模块为 NEO-M8L-01A-81(应该是双频GPS模块)
 HW4.0 中的GPS模块接口
HW4.0 中的GPS模块接口
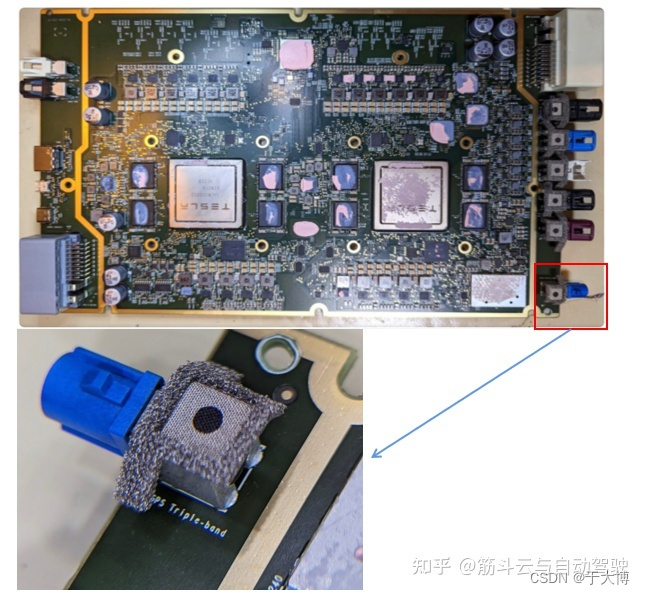
3)毫米波雷达接口变化
HW3.0 —— 毫米波雷达采用CAN总线接口
HW4.0 —— 采用定制的高分辨率毫米波雷达,代号Phoenix(很可能是4D毫米波雷达),采用100 Mbps的以太网接口
备注:还配置了雷达加热器,应该是用以防止冰雪天气中对雷达信号的影响
4)智驾模块与座舱模块之间的通讯接口
HW3.0 —— 1个以太网接口
HW4.0 —— 2个以太网接口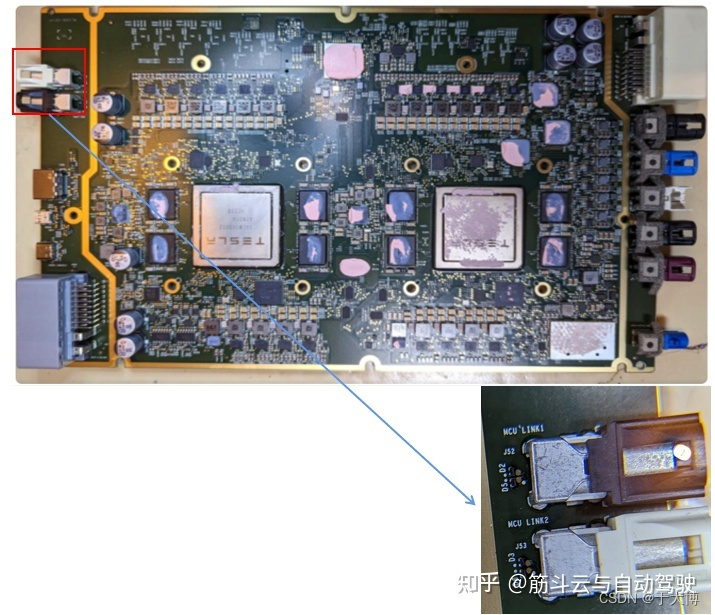
HW4.0 中的智驾模块与座舱模块之间的通讯接口
2.2 FSD芯片架构的变化
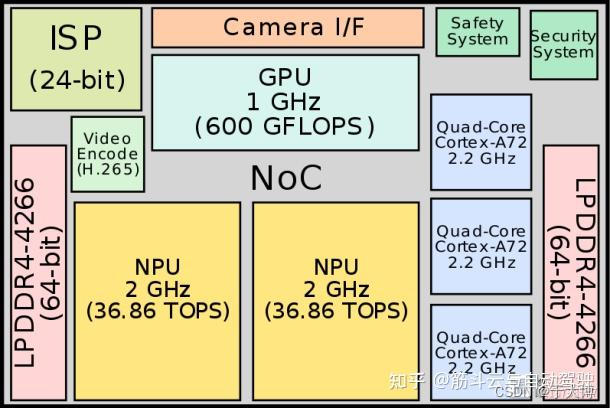
HW3.0 中的FSD芯片架构
1)HW3.0 内的 FSD芯片(14nm制程,三星代工)的架构:
- 12个Cortex-A72 CPU核 ,分成3个集群,每个集群包含4个CPU核心,CPU的最大频率为2.2GHz
- 2个NPU,工作频率为2GHz
2)HW4.0 内的FSD芯片(7nm制程,三星代工)的架构:
- 20个CPU核(CPU架构未知 ) ,分成5个集群,每个集群包含4个CPU核心,CPU的最大频率为2.35GHz,闲时频率1.37GHz
- 3个NPU,工作频率为2.2GHz
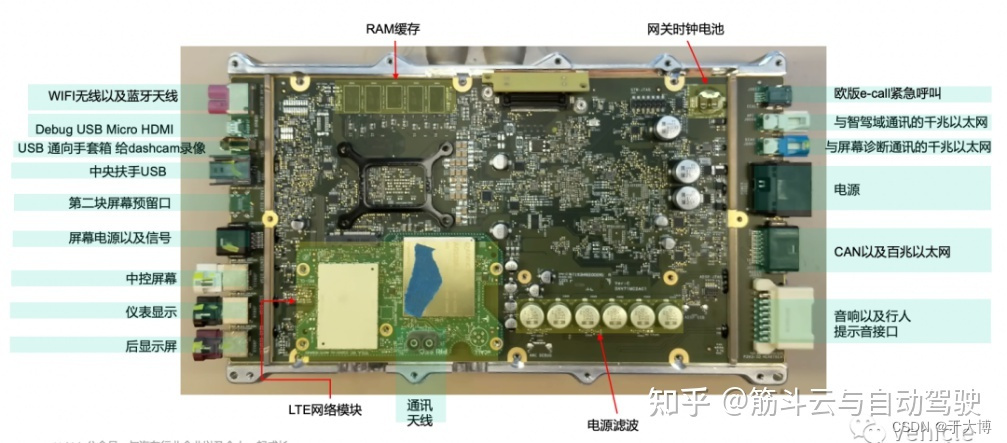
3. 座舱域控模块硬件上的差异
HW3.0的座舱域控模块是APU+GPU两块板子,HW4.0的座舱域控模块的GPU和APU被集成在了一块板子上,集成度更高一些。(所以,HW4.0 盒子整体的厚度看着更薄一些)。
但是板子上主要的配置并没有什么变化:
- 处理器:AMD的APU+GPU
- 存储器:16G RAM,256G NVME存储
 HW3.0- 座舱域模块APU正面
HW3.0- 座舱域模块APU正面

HW3.0- 座舱域模块APU反面 
APU与GPU板子之间通过ePCI连接 
HW4.0 - 座舱域控模块主板正面

HW4.0 - 座舱域控模块主板反面

















 1082
1082

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









