







本文参考 文档1, 文档2
有两种方法,将分别做出说明。
1、使用matplotlib.path库
步骤:
- 创建多边形点
- matplotlib.path生成多边形路径
- 判断点是否在多边形内
示例代码为:
import matplotlib.path as mplPath
import numpy as np
poly = [190, 50, 500, 310]
poly_path = mplPath.Path(np.array([[190, 50],
[50, 500],
[500, 310],
[310, 190]])) #四个顶点
point = (200, 100)
print(point, " is in polygon: ", poly_path.contains_point(point))
point = (1200, 1000)
print(point, " is in polygon: ", poly_path.contains_point(point))
输出为:
(200, 100) is in polygon: True
(1200, 1000) is in polygon: False
如果是多个点,那么point是N,2的numpy ndarray即可,contains_points。
2、使用shapely库
示例:
from shapely.geometry import Point
from shapely.geometry.polygon import Polygon
point = Point(0.5, 0.5)
polygon = Polygon([(0, 0), (0, 1), (1, 1), (1, 0)])
print(polygon.contains(point))
但shapely库只能用在linux系统
对比速度:
import matplotlib.path as mplPath
import numpy as np
import time
from shapely.geometry import Point
from shapely.geometry.polygon import Polygon
poly_path = mplPath.Path(np.array([[190, 50],[50, 500],[500, 310],[310, 190]]))
point1 = (200, 100)
point2 = (1200, 1000)
print(point1, " is in polygon: ", poly_path.contains_point(point1))
print(point2, " is in polygon: ", poly_path.contains_point(point2))
start = time.time()
for i in range(1000):
poly_path.contains_point(point1)
duration = time.time()-start
print('total time',duration)
point1 = Point(200, 100)
point2 = Point(1200,1000)
polygon = Polygon([[190, 50],[50, 500],[500, 310],[310, 190]])
print(polygon.contains(point1))
print(polygon.contains(point2))
start = time.time()
for i in range(1000):
polygon.contains(point1)
duration = time.time()-start
print('total time',duration)
结果:

第二种方法速度慢,当多边形点和要检查的点增多时,速度会有更多影响,所以要使用第一种。
更多快速的方法参考我提供的链接。
3、opencv cv2.pointPolygonTest
2023年补充
cv2.pointPolygonTest() 是一个 OpenCV 函数,用于计算一个点到一个多边形的距离。该函数的参数包括一个轮廓列表、一个像素点坐标和一个布尔值,用于指示是否输出该像素点到轮廓最近距离。如果为 True,则输出该像素点到轮廓最近距离;如果为 False,则输出为正表示在轮廓内,0 表示在轮廓上,负表示在轮廓外。该函数的实现基于多边形的算法,通过随意选取一个点并水平划一条线,计算这条横线和多边形的边相交的次数,再计算这条横线穿越多边形的次数是否为奇数。如果是奇数,则该点在多边形内;如果是偶数,则该点在多边形外。
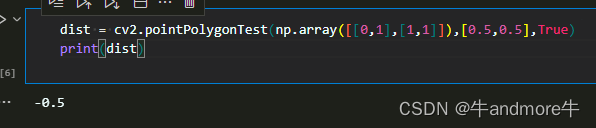
这个函数也可以测点到线的距离,返回都是负数。
测距:
dist = cv2.pointPolygonTest(np.array([[0,1],[1,1]]),[0.5,0.5],True)
print(dist)
测点是否在多边形内部:
import cv2
poly = np.array([[190, 50],[50, 500],[500, 310],[310, 190]])
point1 = (200, 100)
point2 = (1200, 1000)
print(point1, " is in polygon: ", cv2.pointPolygonTest(poly,point1,measureDist=False))
print(point2, " is in polygon: ", cv2.pointPolygonTest(poly,point2,measureDist=False))
测速:
import matplotlib.path as mplPath
import numpy as np
import time
from shapely.geometry import Point
from shapely.geometry.polygon import Polygon
poly_path = mplPath.Path(np.array([[190, 50],[50, 500],[500, 310],[310, 190]]))
point1 = (200, 100)
point2 = (1200, 1000)
print(point1, " is in polygon: ", poly_path.contains_point(point1))
print(point2, " is in polygon: ", poly_path.contains_point(point2))
start = time.time()
for i in range(1000):
poly_path.contains_point(point1)
duration = time.time()-start
print('total time',duration)
point1 = Point(200, 100)
point2 = Point(1200,1000)
polygon = Polygon([[190, 50],[50, 500],[500, 310],[310, 190]])
print(polygon.contains(point1))
print(polygon.contains(point2))
start = time.time()
for i in range(1000):
polygon.contains(point1)
duration = time.time()-start
print('total time',duration)
poly = np.array([[190, 50],[50, 500],[500, 310],[310, 190]])
point1 = (200, 100)
point2 = (1200, 1000)
print(point1, " is in polygon: ", cv2.pointPolygonTest(poly,point1,measureDist=False))
print(point2, " is in polygon: ", cv2.pointPolygonTest(poly,point2,measureDist=False))
start = time.time()
for i in range(1000):
cv2.pointPolygonTest(poly,point1,measureDist=False)
duration = time.time()-start
print('total time',duration)
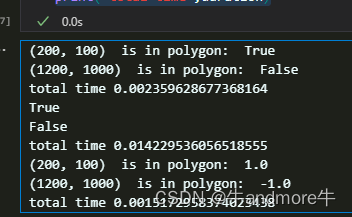
可以看到opencv是最快的。














 5044
5044











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









