







这篇主要讲kalman滤波的预测和更新过程,首相强调以下上篇(kalman滤波理解一:理论框架)所强调的连个理论原则:
- 预测过程符合全概率法则,是卷积过程,即采用概率分布相加;
- 感知过程符合贝叶斯法则,是乘积过程,即采用概率分布相乘;
(一)预测过程
假设有一辆小车在路上行驶,其状态有位置p,速度v,我们用一个列向量来表示此时的状态:
![]()
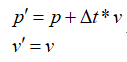
如果我问你,经过![]() 时间后,其位置和速度分别是多少?计算也很简单,我们假设该系统是无控制系统,即没有控制输入,保持匀速直线行驶:
时间后,其位置和速度分别是多少?计算也很简单,我们假设该系统是无控制系统,即没有控制输入,保持匀速直线行驶:
表示成矩阵形式就是:
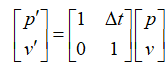
即
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1498
1498

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









