







近期,在研究SFM和pose estimation时时常接触到这三个词,刚开始不太明白他们间的关系,现将他们整理一下。欢迎吐槽,有什么不对的地方欢迎指正!
首先,介绍一下三个词的数学定义与含义:
雅可比矩阵
假设F:Rn→Rm 是一个从欧式n维空间转换到欧式m维空间的函数。这个函数由m个实函数组成: y1(x1,...,xn), ..., ym(x1,...,xn). 这些函数的偏导数(如果存在)可以组成一个m行n列的矩阵,这就是所谓的雅可比矩阵:
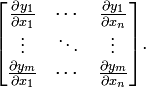
此矩阵表示为:
-
 ,或者
,或者
这个矩阵的第i行是由梯度函数的转置yi(i=1,...,m)表示的
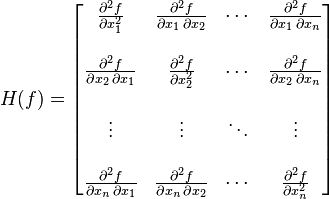
在数学中,海森矩阵(Hessian matrix 或 Hessian)是一个自变量为向量的实值函数的二阶偏导数组成的方块矩阵,此函数如下:

如果 f 所有的二阶导数都存在,那么 f 的海森矩阵即:

其中  ,即
,即
解非线性最小二乘法






















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









