







非极大值抑制(Non Maximum Suppression)最常用的领域就是目标检测,比如人脸检测,物体检测等。下面也就其在目标检测领域的应用及其代码实现。
目标检测的基本流程如下:
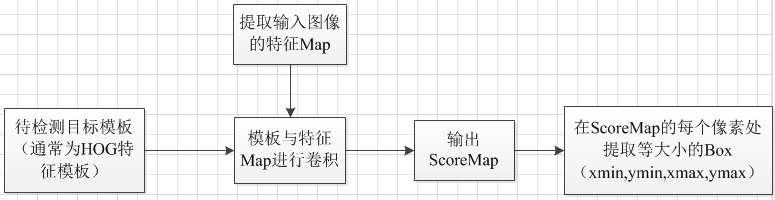
具体示意图如下:
所以,在输出的ScoreMap中,像素数为numel(ScoreMap),则输出检测到的Box数目为numel(ScoreMap)个,其维数为(4,numel(ScoreMap)),那么在这么多个输出的detBox(检测到的Box)中,哪一个(假设图像中只含一个目标)呢?这就需要采用非极大值抑制去除冗余的detBox,抑制的过程是一个迭代-遍历-消除的过程。具体如下代码实现:
im = imread(testImages{3}) ;
im = im2single(im) ;
% Compute detections
[detections, scores] = detect(im, w, hogCellSize, scales) ;
% Non-maxima suppression
keep = boxsuppress(detections, scores, 0.25) ;
detections = detections(:, keep) ;
scores = scores(keep) ;
% Further keep only top detections
detections = detections(:, 1:10) ;
scores = scores(1:10) ;function keep = boxsuppress(boxes, scores, threshold)
% BOXSUPPRESS Box non-maxima suprression(非最大值抑制)
% KEEP = BOXSUPPRESS(BOXES, SCORES, THRESHOLD)
% remove any empty box (xmax < xmin or ymax < ymin)
scores(any([-1 0 1 0 ; 0 -1 0 1] * boxes < 0)) = -inf ;
keep = false(1, size(boxes,2)) ;
while true
[score, best] = max(scores) ;
if score == -inf, break ; end
keep(best) = true ;
remove = boxinclusion(boxes(:,best), boxes, 'pascalFormat', true) >= threshold ;
scores(remove) = -inf ;
scores(best) = -inf ; % `best` is not in `remove` if threshold > 1
endfunction dist = calcBoxInclusion(A, B, varargin)
%%boxinclusion
% GETBOXOVERLAP
% A and B have a box for each column, in the format [xmin ymin xmax
% ymax]. The resulting matrix dist has A's boxes along the rows
% and B's boxes along the columns and contains the percentage of
% the area of each box B contained in the box A.
opts.pascalFormat = false ;
opts = vl_argparse(opts, varargin) ;
m = size(A,2) ;
n = size(B,2) ;
O = [] ;
if m==0 || n==0, dist = zeros(m,n) ; return ; end
om = ones(1,m) ;
on = ones(1,n) ;
if opts.pascalFormat
A(3:4,:) = A(3:4,:) + 1 ;
B(3:4,:) = B(3:4,:) + 1 ;
end
% find length Ox of the overlap range [x1, x2] along x
% x1 cannot be smaller than A.xmin B.xmin
% x2 cannot be larger than A.xmax B.xmax
% Ox is x2 - x1 or 0
x1 = max(A(1*on,:)', B(1*om,:)) ;
x2 = min(A(3*on,:)', B(3*om,:)) ;
Ox = max(x2 - x1, 0) ;
y1 = max(A(2*on,:)', B(2*om,:)) ;
y2 = min(A(4*on,:)', B(4*om,:)) ;
Oy = max(y2 - y1, 0) ;
% are of the intersection
areaInt = Ox .* Oy ;
% area of the union is sum of areas - inersection
areaA = prod(A(3:4,:) - A(1:2,:)) ;
areaB = prod(B(3:4,:) - B(1:2,:)) ;
% final distance matrix
dist = areaInt ./ (areaB(om,:) + eps) ;重点部分注释:
scores(any([-1 0 1 0 ; 0 -1 0 1] * boxes < 0)) = -inf ;
x1 = max(A(1*on,:)', B(1*om,:)) ;
x2 = min(A(3*on,:)', B(3*om,:)) ;
y1 = max(A(2*on,:)', B(2*om,:)) ;
y2 = min(A(4*on,:)', B(4*om,:)) ;要理解此段代码,见下图所示:
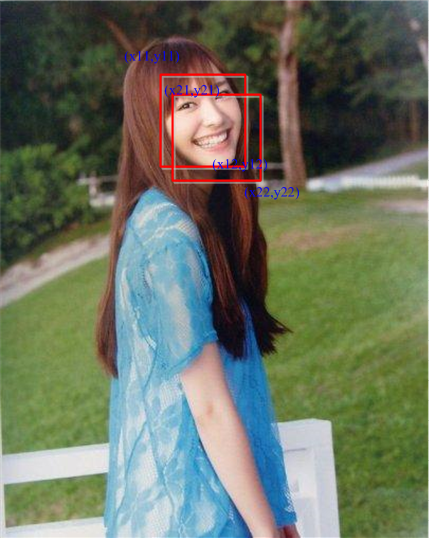
重叠部分的面积即为左上角(x21,y21)(框2的坐标小值)到右下角(x12,y12)(框1坐标的大值)矩形的面积。因为框1已经是按照Score的较大值像素点检测出的Box,框2是按照次较大值检测的Box,如果两者的Box有较大面积重合(设定一个阈值),此时可以说明框1和框2都在目标附近,但是框1更准确一点定位到目标,那么框2也就没必要保留了。继续迭代下一个检测到的Box,是否满足消除条件决定是否保留Box,这就是非最大值抑制。
参考:
1. NMS——非极大值抑制

















 685
685

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









