







NMS(non maximum suppression),中文名非极大值抑制,在很多计算机视觉任务中都有广泛应用,如:边缘检测、目标检测等。
这里主要以人脸检测中的应用为例,来说明NMS,并给出Matlab和C++示例程序。
人脸检测的一些概念
(1) 绝大部分人脸检测器的核心是分类器,即给定一个尺寸固定图片,分类器判断是或者不是人脸;
(2)将分类器进化为检测器的关键是:在原始图像上从多个尺度产生窗口,并resize到固定尺寸,然后送给分类器做判断。最常用的方法是滑动窗口。
以下图为例,由于滑动窗口,同一个人可能有好几个框(每一个框都带有一个分类器得分)
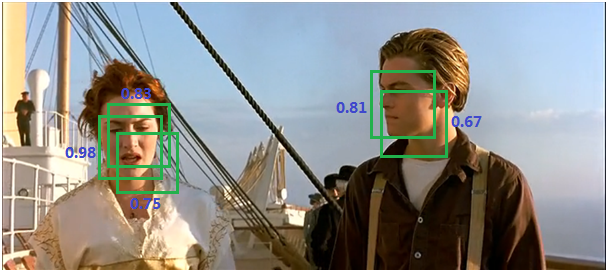
而我们的目标是一个人只保留一个最优的框:
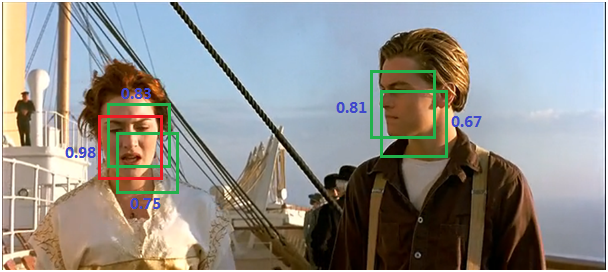
于是我们就要用到非极大值抑制,来抑制那些冗余的框: 抑制的过程是一个迭代-遍历-消除的过程。
(1)将所有框的得分排序,选中最高分及其对应的框:
(2)遍历其余的框ÿ
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 6866
6866

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









