









基于麻雀算法改进的无线传感器网络Dv-hop定位算法
摘要:本文介绍基于麻雀改进的DV-Hop算法。
1.DV-Hop算法原理
DV-Hop算法的定位步骤如下:
(1)各锚节点向通信范围内的邻居节点广播自身的位置信息。接收节点则记录到每个锚节点的最小跳数,同时忽略来自同一个锚节点的较大的跳数信息,而后将跳数值加1转发给邻居节点。
(2)每个锚节点根据所记录的其他锚节点的坐标信息和跳数,通过式(1)估算网络平均跳距距离。
H
o
p
S
i
z
e
i
=
∑
j
≠
i
(
x
i
−
x
j
)
2
+
(
y
i
−
y
j
)
2
∑
j
≠
i
h
o
p
S
i
j
(1)
HopSize_i=\frac{\sum_{j\neq i}\sqrt{(x_i-x_j)^2+(y_i-y_j)^2}}{\sum_{j\neq i }hopS_{ij}}\tag{1}
HopSizei=∑j=ihopSij∑j=i(xi−xj)2+(yi−yj)2(1)
式中,
j
j
j为锚节点
i
i
i数据表中的其他锚节点号,
h
o
p
S
i
j
hopS_{ij}
hopSij 为锚节点
i
i
i和
j
j
j之间的跳数。
锚节点将所计算的平均跳距广播至整个网络后,未知节点仅记录所收到的第一个平均跳距,并向邻居节点转发,未知节点接收到平均跳距后,跟据所记录的跳数信息,按式(2)估算未知节点 i 到某个锚节点的距离:
L
i
=
S
i
∗
H
o
p
S
i
z
e
(2)
L_i=S_i*HopSize \tag{2}
Li=Si∗HopSize(2)
(3)设
P
1
(
x
1
,
y
1
)
,
.
.
.
,
P
n
(
x
n
,
y
n
)
P_1(x_1,y_1),...,P_n(x_n,y_n)
P1(x1,y1),...,Pn(xn,yn)表示
n
n
n个锚节点的坐标位置,待定位节点D的位置为
(
x
,
y
)
(x,y)
(x,y) ,其与标节点估计距离分别为
d
1
,
d
2
,
.
.
.
,
d
n
−
1
d_1,d_2,...,d_{n-1}
d1,d2,...,dn−1 ,可以建立式(3)的方程。
{
(
x
1
−
x
)
2
+
(
y
1
−
y
)
2
=
d
1
2
(
x
2
−
x
)
2
+
(
y
2
−
y
)
2
=
d
2
2
.
.
.
(
x
n
−
x
)
2
+
(
y
n
−
y
)
2
=
d
n
2
(3)
\begin{cases} (x_1-x)^2+(y_1-y)^2=d_1^2\\ (x_2-x)^2+(y_2-y)^2=d_2^2\\ ...\\ (x_n-x)^2+(y_n-y)^2=d_n^2 \end{cases}\tag{3}
⎩⎪⎪⎪⎨⎪⎪⎪⎧(x1−x)2+(y1−y)2=d12(x2−x)2+(y2−y)2=d22...(xn−x)2+(yn−y)2=dn2(3)
第一个方程组减去第后一个方程后,到得:
{
2
(
x
1
−
x
n
)
x
+
2
(
y
1
−
y
n
)
y
=
x
1
2
−
x
n
2
+
y
1
2
−
y
n
2
−
d
1
2
+
d
n
2
2
(
x
2
−
x
n
)
x
+
2
(
y
2
−
y
n
)
y
=
x
2
2
−
x
n
2
+
y
2
2
−
y
n
2
−
d
2
2
+
d
n
2
.
.
.
2
(
x
n
−
1
−
x
n
)
x
+
2
(
y
n
−
1
−
y
n
)
y
=
x
n
−
1
2
−
x
n
2
+
y
n
−
1
2
−
y
n
2
−
d
n
−
1
2
+
d
n
2
(4)
\begin{cases} 2(x_1-x_n)x+2(y_1-y_n)y=x_1^2-x_n^2+y_1^2-y_n^2-d_1^2+d_n^2\\ 2(x_2-x_n)x+2(y_2-y_n)y=x_2^2-x_n^2+y_2^2-y_n^2-d_2^2+d_n^2\\ ...\\ 2(x_{n-1}-x_n)x+2(y_{n-1}-y_n)y=x_{n-1}^2-x_n^2+y_{n-1}^2-y_n^2-d_{n-1}^2+d_n^2\\ \end{cases}\tag{4}
⎩⎪⎪⎪⎨⎪⎪⎪⎧2(x1−xn)x+2(y1−yn)y=x12−xn2+y12−yn2−d12+dn22(x2−xn)x+2(y2−yn)y=x22−xn2+y22−yn2−d22+dn2...2(xn−1−xn)x+2(yn−1−yn)y=xn−12−xn2+yn−12−yn2−dn−12+dn2(4)
用线性方程组表示为
A
L
=
b
AL = b
AL=b,其中,
A
=
[
2
(
x
1
−
x
n
)
2
(
y
1
,
y
n
)
.
.
.
.
.
.
2
(
x
n
−
1
−
x
n
)
2
(
y
n
−
1
−
y
n
)
]
(5)
A=\left[\begin{matrix} 2(x_1-x_n)&2(y_1,y_n)\\ ...&...\\ 2(x_{n-1}-x_n)&2(y_{n-1}-y_n) \end{matrix}\right]\tag{5}
A=⎣⎡2(x1−xn)...2(xn−1−xn)2(y1,yn)...2(yn−1−yn)⎦⎤(5)
L = [ x y ] (6) L=\left[\begin{matrix} x\\ y\end{matrix}\right]\tag{6} L=[xy](6)
b = [ x 1 2 − x n 2 + y 1 2 − y n 2 + d n 2 − d 1 2 . . . x n − 1 2 − x n 2 + y n − 1 2 − y n 2 + d n 2 − d n − 1 2 ] (7) b=\left[\begin{matrix} x_1^2-x_n^2+y_1^2-y_n^2+d_n^2-d_1^2\\ ...\\ x_{n-1}^2-x_n^2+y_{n-1}^2-y_n^2+d_n^2-d_{n-1}^2 \end{matrix}\right]\tag{7} b=⎣⎡x12−xn2+y12−yn2+dn2−d12...xn−12−xn2+yn−12−yn2+dn2−dn−12⎦⎤(7)
采用最小二乘法得到方程组的解为:
L
=
(
A
T
A
)
−
1
A
T
b
L=(A^TA)^-1A^Tb
L=(ATA)−1ATb
2.麻雀算法改进DV-Hop算法原理
麻雀算法原理参考我的博客:https://blog.csdn.net/u011835903/article/details/108830958
从第1节基础的DV-Hop算法原理可知,基础DV-hop在求解未知节点时采用的是最小二乘法,可以利用麻雀算法来改进该步骤,利用麻雀算法寻找未知节点到信标节点的实际距离与估计距离之间的最小误差,从而达到对未知节点位置的估计。定义麻雀算法的寻优参数为未知节点,构造适应度函数为:
f
i
t
n
e
s
s
(
x
,
y
)
=
∑
i
=
1
M
(
(
x
i
−
x
)
2
+
(
y
i
−
y
)
2
−
d
i
2
)
2
fitness(x,y)=\sum_{i=1}^M(\sqrt{(x_i-x)^2+(y_i-y)^2}-d_i^2)^2
fitness(x,y)=i=1∑M((xi−x)2+(yi−y)2−di2)2
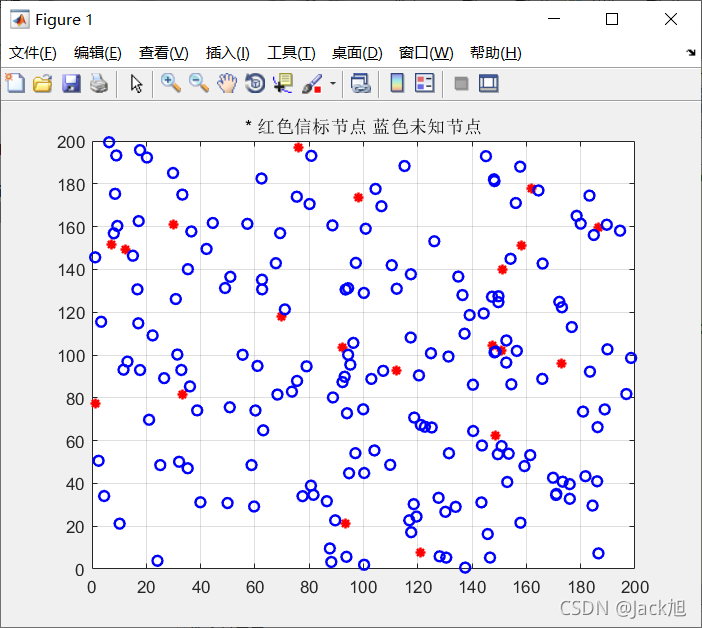
3.算法测试
设定节点覆盖范围为200x200,总节点数为:200,信标节点数20,通信半径为30,未知节点数为180。采用归一化平均定位误差作为评价指标:
e
r
r
o
r
=
∑
i
=
1
m
(
x
i
−
x
i
∗
)
2
+
(
y
i
−
y
i
∗
)
2
k
∗
m
∗
r
(8)
error = \frac{\sum_{i=1}^m\sqrt{(x_i-x_i^*)^2+(y_i-y_i^*)^2}}{k*m*r}\tag{8}
error=k∗m∗r∑i=1m(xi−xi∗)2+(yi−yi∗)2(8)
式中,
m
m
m为未知节点的数目;
k
k
k为实验次数;
r
r
r为节点的通信半径;
(
x
i
,
y
i
)
(x_i,y_i)
(xi,yi)为未知节点的估计坐标;
(
x
i
∗
,
y
i
∗
)
(x_i^*,y_i^*)
(xi∗,yi∗)为该未知节点的真实坐标。

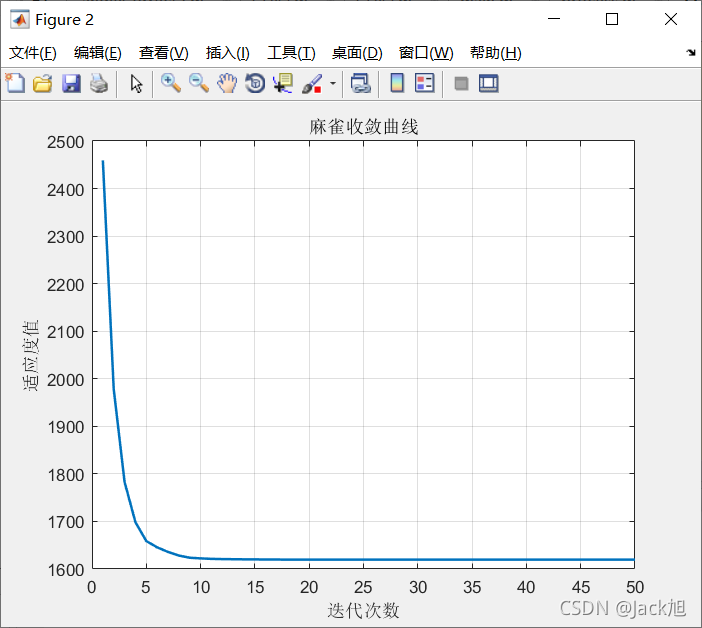
基础DV-hop的归一化定位误差:0.4409
SSA-DV-hop的归一化定位误差:0.19953
从最终归一化定位误差来看,麻雀算法的结果,明显优于传统DV-hop算法的结果。
4.参考文献
[1]吴曦德,方杰,杨世杰,周庆标.基于GPSO-DVHop的传感器节点定位方法[J].计算机工程与应用,2013,49(22):95-99.
[1]张恒. 无线传感器节点定位方法的研究与实现[D].华南理工大学,2012.


















 122
122

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











