






点击上方“AI公园”,关注公众号,选择加“星标“或“置顶”
导读作者:Vardan Grigoryan
编译:ronghuaiyang
知识图谱是AI领域非常有用的一种工具,知识图谱的基础就是图论,从今天开始,给大家介绍一些图论的基础内容,今天是第6篇,图算法的介绍。昨天应该是第5篇,写错了,不好意思。
使用图进行的任何处理都可以归类为“图算法”。你可以实现一个函数打印一个图的所有顶点,并命名为“<张三>的顶点打印算法”。我们大多数人都害怕教科书中列出的图算法(参见这里的完整列表)(https://en.wikipedia.org/wiki/Listofalgorithms#Graph_algorithms)。让我们试着应用一个二分图匹配算法,比如Hopcroft-Karp算法来解决Airbnb的房屋过滤问题:
给出Airbnb homes (H)和filters (F)的二分图,其中H的每个元素(顶点)可以有多个F的相邻元素(顶点)(共享一条公共边)。找到H的一个子集,它由F的一个子集中与顶点相邻的顶点组成。
混淆问题的定义,但我们不能确定在这一点上是否Hopcroft-Karp算法能解决我们的问题。但我向你们保证,这段旅程将教会我们许多图算法背后的关键思想。旅程并不短,所以要有耐心。
Hopcroft-Karp算法是用来解决二分图最大匹配问题的一种算法。为了降低时间复杂度,在Hopcroft-Karp算法中,我们在增加匹配集合M时,每次寻找多条增广路径。
熟悉此算法的读者已经知道,这并不能解决我们的问题,因为匹配要求没有两条边共享一个公共顶点。
让我们看一个例子,其中只有4个过滤器和8个home(为了简单起见)。
home由字母A到H表示,过滤器随机选择。
A房子价格(50美元)和有一张床(这是我们的全部价格)。
从A到H的所有家庭都有每晚50美元的价格标签和一张床,但很少有“Wi-Fi”和/或“电视”。
因此,下面的插图试图展示我们应该“返回”哪些home来响应请求,要求提供所有四个过滤器(例如,每晚50美元,有一张床,还有Wi-Fi和电视)。
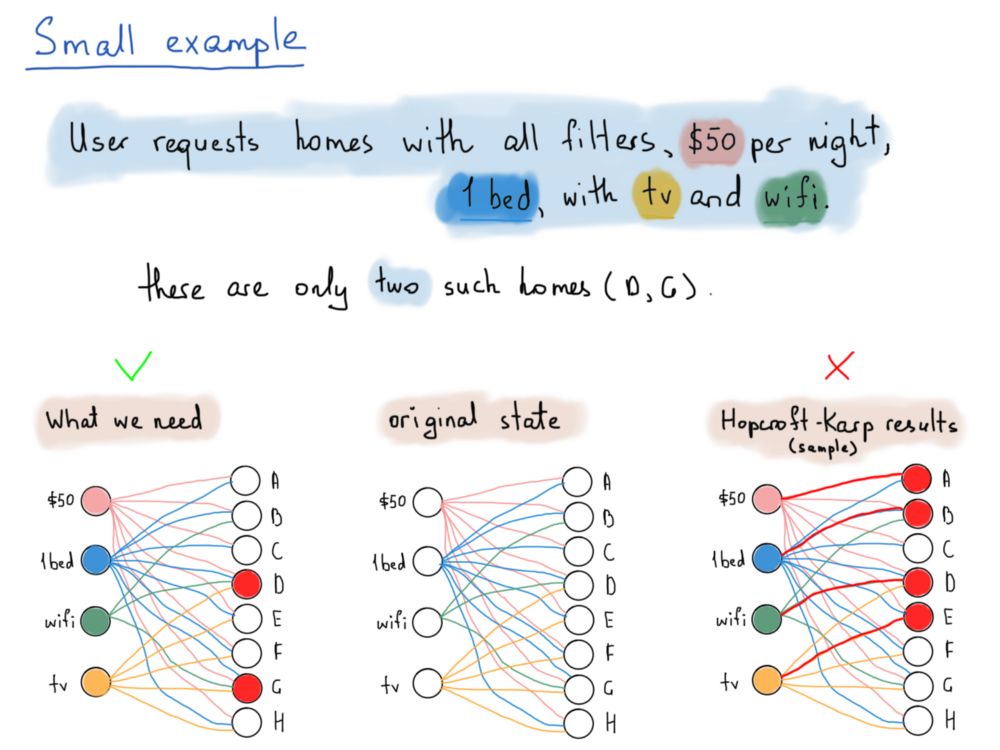
我们的问题的解决方案要求具有公共顶点的边导致不同的主顶点,这些主顶点与相同的过滤器子集相关联,而Hopcroft-Karp算法消除了具有公共端点的边,并在两个子集中生成与顶点相关联的边。
看看上面的插图,我们只需要home D和G,它们都满足所有四个过滤器值。我们真正需要的是得到所有共享一个公共端点的匹配边。
我们可以为这种方法设计一种算法,但是它的处理时间与用户需求无关(用户需求=闪电般的速度,就在这里,就在现在)。创建一个包含多个排序键的平衡二叉搜索树可能会更快,就像一个数据库索引文件一样,它用一组令人满意的记录映射主键/外键。
平衡二叉搜索树和数据库索引将在另一篇文章中讨论,我们将再次回到Airbnb家庭过滤问题。
Hopcroft-Karp算法(以及许多其他算法)基于DFS(深度优先搜索)和BFS(宽度优先搜索)图遍历算法。老实说,在这里引入Hopcroft-Karp算法的真正原因是偷偷地切换到图遍历,最好从漂亮的图(二叉树)开始。
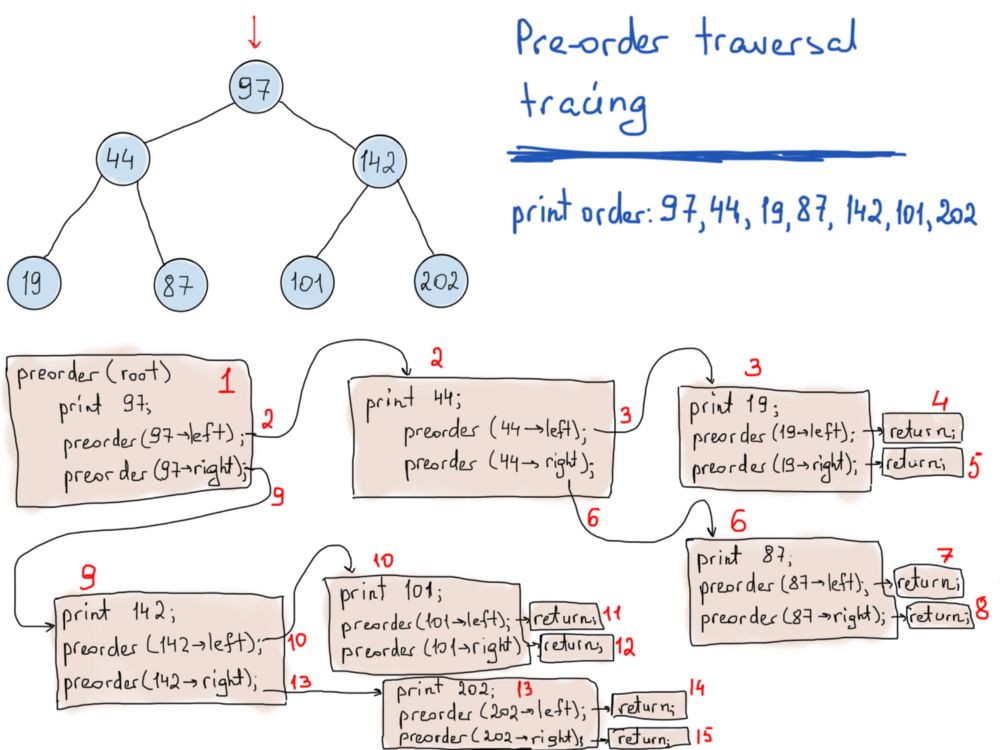
二叉树遍历非常漂亮,主要是因为它们是递归的。有三种基本的遍历称为顺序遍历、后顺序遍历和前序遍历(你可以使用自己的遍历算法)。如果你曾经遍历过链表,那么它们很容易理解。在链表中,你只需打印当前节点的值(在下面的代码中名为“item”),然后继续到下一个节点。
// struct ListNode {
// ListNode* next;
// T item;
// };
void TraverseRecursive(ListNode* node) // starting node, most commonly the list 'head'
{
if (!node) return; // stop
std::cout << node->item;
TraverseRecursive(node->next); // recursive call
}
void TraverseIterative(ListNode* node)
{
while (node) {
std::cout << node->item;
node = node->next;
}
}对于二叉树也几乎是一样的,你打印节点值(或者你需要对它做的任何其他事情),然后继续到下一个节点,但是在本例中,有“两个下一个”节点,左边和右边。因此,你应该对左右节点执行相同的操作。但你有三个不同的选择:
打印节点值,然后转到左侧节点,然后转到右侧节点,或者
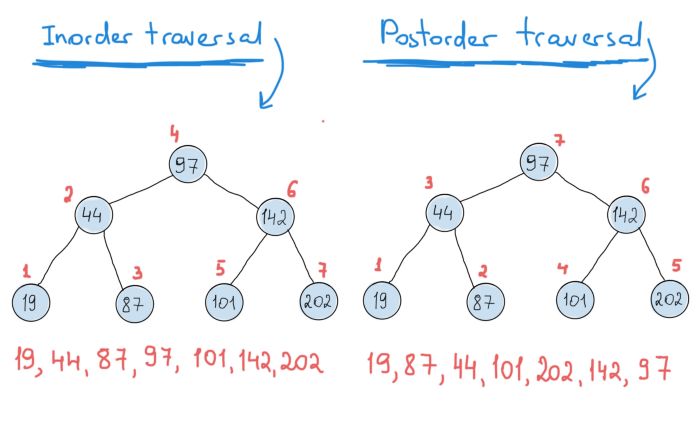
转到左节点,打印节点值,然后转到右节点,或
转到左节点,然后转到右节点,然后打印节点的值。
// struct TreeNode {
// T item;
// TreeNode* left;
// TreeNode* right;
// }
// you cann pass a callback function to do whatever you want to do with the node's value
// in this particular example we are just printing its value.
// node is the "starting point", basically the first call is done with the "root" node
void PreOrderTraverse(TreeNode* node)
{
if (!node) return; // stop
std::cout << node->item;
PreOrderTraverse(node->left); // do the same for the left sub-tree
PreOrderTraverse(node->right); // do the same for the right sub-tree
}
void InOrderTraverse(TreeNode* node)
{
if (!node) return; // stop
InOrderTraverse(node->left);
std::cout << node->item;
InOrderTraverse(node->right);
}
void PostOrderTraverse(TreeNode* node)
{
if (!node) return; // stop
PostOrderTraverse(node->left);
PostOrderTraverse(node->right);
std::cout << node->item;
}
显然,递归函数看起来非常优雅,尽管它们非常昂贵。每次我们递归地调用一个函数,这意味着我们调用一个完全“新的”函数(见上图)。这里的“new”是指应该为函数参数和局部变量“分配”另一个堆栈内存空间。这就是递归调用代价高昂(额外的堆栈空间分配和许多函数调用)和危险(注意堆栈溢出)的原因,显然建议使用迭代实现。在关键任务系统编程中(飞机、NASA漫游车等等),递归是完全禁止的(没有统计数据,没有经验,只是告诉你谣言)。
(未完待续)
 —
END—
—
END—
英文原文:https://medium.com/free-code-camp/i-dont-understand-graph-theory-1c96572a1401

请长按或扫描二维码关注本公众号
喜欢的话,请给我个好看吧!![]()

















 1030
1030

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









