







转自localPosition与anchoredPosition转化
在上一篇中,我们推理出了RectTransform的几个主要成员localPosition, rect, anchor, pivot, offset, anchoredPosition的关系:
RectTransform rect = GetComponent<RectTransform>();
RectTransform parentRect = transform.parent.GetComponent<RectTransform>();
Vector2 GetAnchoredPositionByLocalPosition()
{
// 通过OffsetMin、OffsetMax,将anchoredPosition和localPosition联系起来
Vector2 localPosition2D = new Vector2(rect.localPosition.x, rect.localPosition.y);
Vector2 anchorMinPos = parentRect.rect.min + Vector2.Scale(rect.anchorMin, parentRect.rect.size);
Vector2 rectMinPos = rect.rect.min + localPosition2D;
Vector2 offsetMin = rectMinPos - anchorMinPos;
Vector2 anchorMaxPos = parentRect.rect.max - Vector2.Scale(Vector2.one - rect.anchorMax, parentRect.rect.size);
Vector2 rectMaxPos = rect.rect.max + localPosition2D;
Vector2 offsetMax = rectMaxPos - anchorMaxPos;
Vector2 sizeDelta = offsetMax - offsetMin;
Vector2 anchoredPosition = offsetMin + Vector2.Scale(sizeDelta, rect.pivot);
return anchoredPosition;
}
在这一篇,就主要想试从这个公式,来了解RectTransform里面的几个变量的几何含义。
不过这里面的几个简单变量,如offsetMax, offsetMin就不介绍了,看下面这篇就好了,主要介绍一下我觉得有错误的sizeDelta,和主要研究对象anchoredPosition。
一、sizeDelta
在公式变形前,我们其实都已经知道了,sizeDelta = offsetMax - offsetMin,几何意义是ui本身大小 减去 锚框 大小。
那么,我们怎么用公式证明出来呢?
 下面这些证明过程,为了理解方便,就单取只是各个向量的x,不以二维向量形式计算(当然y轴的证明方式也是一样的)这些操作只是对 点 和 线段长度 来计算,并不是以向量的形式pivot,anchorMin 和 anchorMax 是百分比的存在offsetMin, offsetMax, rect.width, rect.height是长度,不是向量,也不是点rect.min, rect.max 是点
下面这些证明过程,为了理解方便,就单取只是各个向量的x,不以二维向量形式计算(当然y轴的证明方式也是一样的)这些操作只是对 点 和 线段长度 来计算,并不是以向量的形式pivot,anchorMin 和 anchorMax 是百分比的存在offsetMin, offsetMax, rect.width, rect.height是长度,不是向量,也不是点rect.min, rect.max 是点
理解了上面几个变量表示的含义之后,操作就简单了。
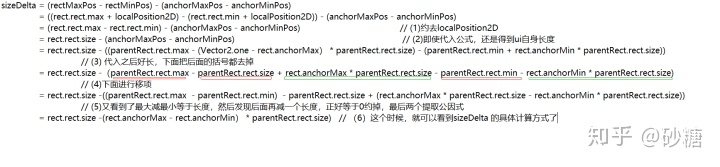
sizeDelta = offsetMax - offsetMin
= (rectMaxPos - anchorMaxPos) -(rectMinPos - anchorMinPos) // (1)代入上面的公式
= (rectMaxPos - rectMinPos) - (anchorMaxPos - anchorMinPos) // (2)将相关变量移到一起
= rectWidth - (anchorMaxPos - anchorMinPos) // (3)ui本身最大x坐标-最小x坐标,等于ui自身的大小rect.width
= rectWidth - anchorRectWidth // (4)同上,等处锚框长度
// sizeDelta 的x等于ui自身长度-锚框长度,证毕。
// 根据计算出来的结果,如果当4个锚点集合在一块时,anchroRectWidth = 0, 所以此时sizeDelta等于ui自身真实大小
// y轴同理。
// 当然还可以继续往第三步代入公式,可以得到sizeDelta和anchorMin, anchorMax, parentRect之间的关系,有兴趣的可以自己往下写
二、anchoredPosition
了解了sizeDelta的几何含义推导,那么现在了解一下anchoredPosition的几何含义。
第一种理解:
我们知道anchoredPosition = offsetMin + Vector2.Scale(sizeDelta, rect.pivot)

 第二种理解,我们知道,anchoredPosition = pivotPos - anchorPos(当所有锚点都再一个地方时)。所以此时的虚四合一锚点,在相差offsetMin + Vector2.Scale(sizeDelta, rect.pivot)的位置上。
第二种理解,我们知道,anchoredPosition = pivotPos - anchorPos(当所有锚点都再一个地方时)。所以此时的虚四合一锚点,在相差offsetMin + Vector2.Scale(sizeDelta, rect.pivot)的位置上。














 3082
3082











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









