







 本文介绍了Cocos2dx中实现Ray-AABB相交检测的两种算法,包括直接判断射线与包围盒各面相交情况的方法和使用光线与平面相交参数方程的方法。详细解释了每种方法的原理和实现过程。
本文介绍了Cocos2dx中实现Ray-AABB相交检测的两种算法,包括直接判断射线与包围盒各面相交情况的方法和使用光线与平面相交参数方程的方法。详细解释了每种方法的原理和实现过程。
这里介绍两种算法,第一种比较容易理解
下面是Cocos2dx中实现Ray-AABB相交(碰撞)检测的算法,说明看注释
bool Ray::intersects(const AABB& aabb) const
{
Vec3 ptOnPlane; //射线与包围盒某面的交点
Vec3 min = aabb._min; //aabb包围盒最小点坐标
Vec3 max = aabb._max; //aabb包围盒最大点坐标
const Vec3& origin = _origin; //射线起始点
const Vec3& dir = _direction; //方向矢量
float t;
//分别判断射线与各面的相交情况
//判断射线与包围盒x轴方向的面是否有交点
if (dir.x != 0.f) //射线x轴方向分量不为0 若射线方向矢量的x轴分量为0,射线不可能经过包围盒朝x轴方向的两个面
{
/*
使用射线与平面相交的公式求交点
*/
if (dir.x > 0)//若射线沿x轴正方向偏移
t = (min.x - origin.x) / dir.x;
else //射线沿x轴负方向偏移
t = (max.x - origin.x) / dir.x;
if (t > 0.f) //t>0时则射线与平面相交
{
ptOnPlane = origin + t * dir; //计算交点坐标
//判断交点是否在当前面内
if (min.y < ptOnPlane.y && ptOnPlane.y < max.y && min.z < ptOnPlane.z && ptOnPlane.z < max.z)
{
return true; //射线与包围盒有交点
}
}
}
//若射线沿y轴方向有分量 判断是否与包围盒y轴方向有交点
if (dir.y != 0.f)
{
if (dir.y > 0)
t = (min.y - origin.y) / dir.y;
else
t = (max.y - origin.y) / dir.y;
if (t > 0.f)
{
ptOnPlane = origin + t * dir;
if (min.z < ptOnPlane.z && ptOnPlane.z < max.z && min.x < ptOnPlane.x && ptOnPlane.x < max.x)
{
return true;
}
}
}
//若射线沿z轴方向有分量 判断是否与包围盒y轴方向有交点
if (dir.z != 0.f)
{
if (dir.z > 0)
t = (min.z - origin.z) / dir.z;
else
t = (max.z - origin.z) / dir.z;
if (t > 0.f)
{
ptOnPlane = origin + t * dir;
if (min.x < ptOnPlane.x && ptOnPlane.x < max.x && min.y < ptOnPlane.y && ptOnPlane.y < max.y)
{
return true;
}
}
}
return false;
}下面是另外一种Ray-AABB检测算法,称为"Slabs method"
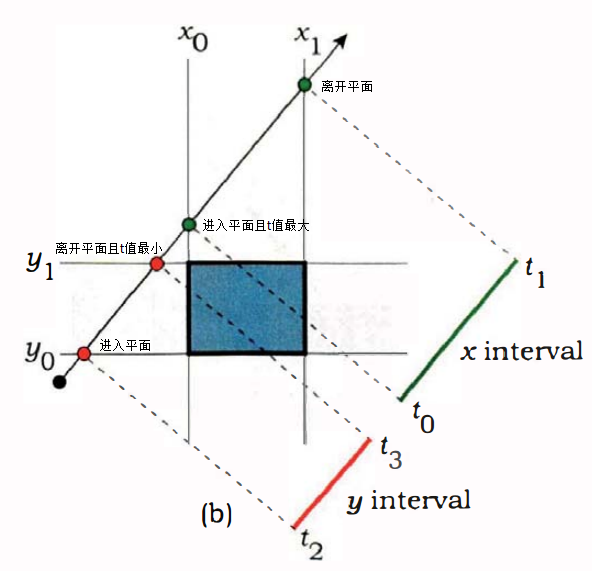
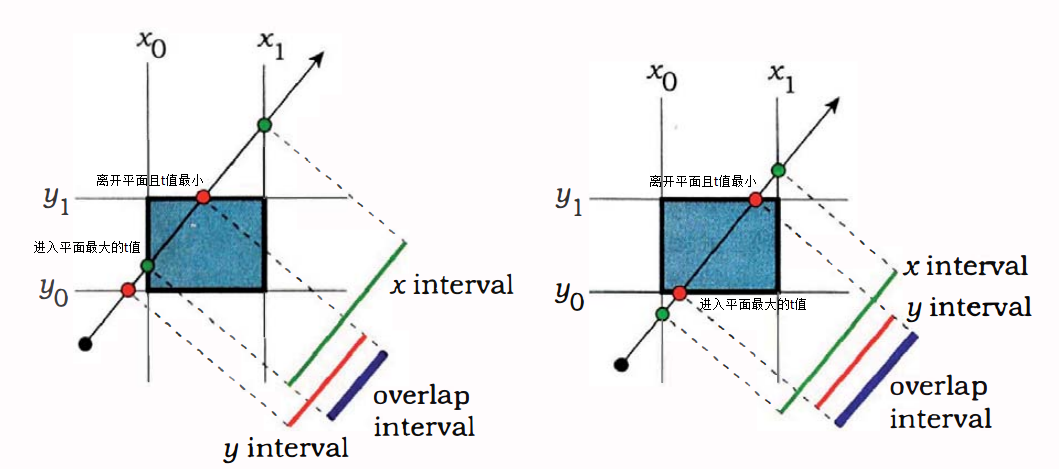
观察上述三幅图可以得出,只要发生区间交叠,光线与平面就能相交,
那么区间交叠出现的条件便是:光线进入平面处的最大t值小于光线离开平面处的最小t值
那么问题就变成了如何求 光线进入平面处的最大t值 以及 光线离开平面处的最小t值
这个问题很简单,通过光线与平面相交的参数方程求解就可以了,
光线的参数方程为R(t) = O + t * Dir
一般平面方程为aX+bY+cZ+d=0,因为AABB的六个面分别平行于XY、XZ、YZ平面,所以平面的方程为X=d,Y=d,Z=d
光线与垂直于x轴的两个面相交时,t = (d - O.x) / Dir.x
光线与垂直于y轴的两个面相交时,t = (d - O.y) / Dir.y
光线与垂直于z轴的两个面相交时,t = (d - O.z) / Dir.z
注意到t<0时,交点位于光线的起点之后,则光线(射线)并未与盒体发生相交
bool BBox::hit(const Ray& ray) const
{
double ox = ray.o.x;double oy = ray.o.y;double oz = ray.o.z;
double dx = ray.d.x;double dy = ray.d.y;double dz = ray.d.z;
double tx_min,ty_min,tz_min;
double tx_max,ty_max,tz_max;
//x0,y0,z0为包围体的最小顶点
//x1,y1,z1为包围体的最大顶点
if(abs(dx) < 0.000001f)
{
//若射线方向矢量的x轴分量为0且原点不在盒体内
if(ox < x1 || ox > x0)
return false ;
}
else
{
if(dx>=0)
{
tx_min = (x0-ox)/dx;
tx_max = (x1-ox)/dx;
}
else
{
tx_min = (x1-ox)/dx;
tx_max = (x0-ox)/dx;
}
}
if(abs(dy) < 0.000001f)
{
//若射线方向矢量的x轴分量为0且原点不在盒体内
if(oy < y1 || oy > y0)
return false ;
}
else
{
if(dy>=0)
{
ty_min = (y0-oy)/dy;
ty_max = (y1-oy)/dy;
}
else
{
ty_min = (y1-oy)/dy;
ty_max = (y0-oy)/dy;
}
}
if(abs(dz) < 0.000001f)
{
//若射线方向矢量的x轴分量为0且原点不在盒体内
if(oz < z1 || oz > z0)
return false ;
}
else
{
if(dz>=0)
{
tz_min = (z0-oz)/dz;
tz_max = (z1-oz)/dz;
}
else
{
tz_min = (z1-oz)/dz;
tz_max = (z0-oz)/dz;
}
}
double t0,t1;
//光线进入平面处(最靠近的平面)的最大t值
t0=max(tz_min,max(tx_min,ty_min));
//光线离开平面处(最远离的平面)的最小t值
t1=min(tz_max,min(tx_max,ty_max));
return t0<t1;
}
















 2612
2612

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









